









1. 源由
iNav在导航飞行功能是非常强大的,尤其是GPS路点飞行等。
同时,也做一个备份记录,以便可查阅。
2. 模型配置
硬件配置情况:
- Mark4
- H743 BMI270 x 2
- EFM8 Bluejay
- Motor 2205 2450RPM x 4
- GPS BN880
- CRSF Receiver
- FOXEER Toothless 2
- PandaRC VT5804M L1 (Buzzer/Mic/IRC Protocol) 5.8G
飞控硬件配置:
- 控制器:STM32H743VI H6
- 陀螺仪:BMI270
- 气压计:DPS310
- 黑匣子:128MB
- PWM输出:10CH
- 舵机输出:2CH
- 通用串口:8CH
- 输入电源:3-6SLipo
- 输出电源:5V/2.5A, 9V/3A
- 重量:8.8g
- 外形尺寸:37mm x 37mm
- 安装孔位:30.5mm x 30.5mm
3. 软件配置
注:这里是解决了iNav6.1.1 蜂鸣器持续蜂鸣问题后的版本(当前需要自编译)。
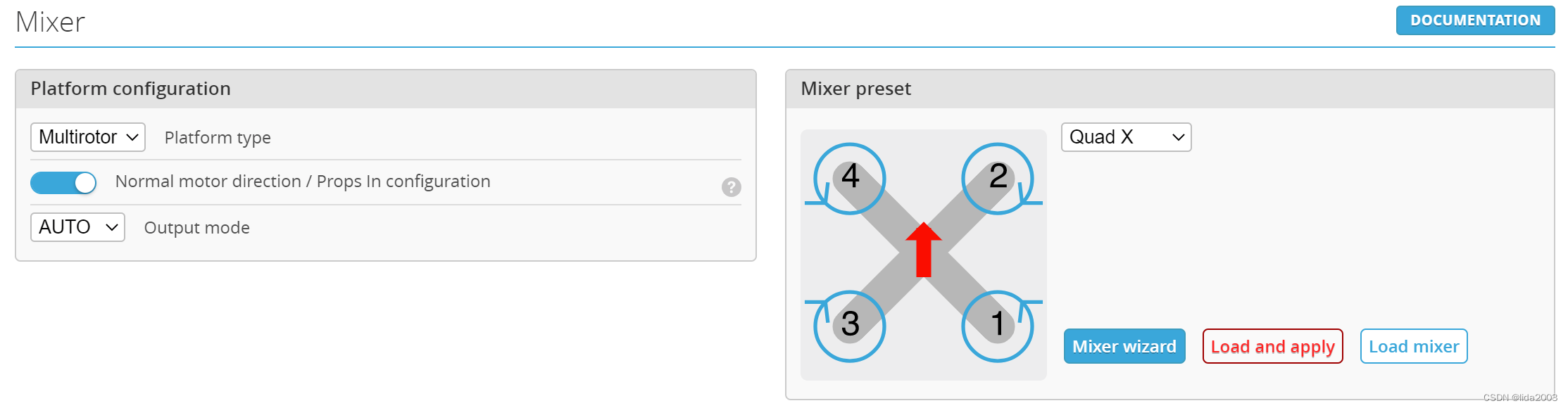
3.1 构型
目前情况看,这种X反向配置方式可以比较好的避免碰撞时,将障碍物刮到摄像头方向。
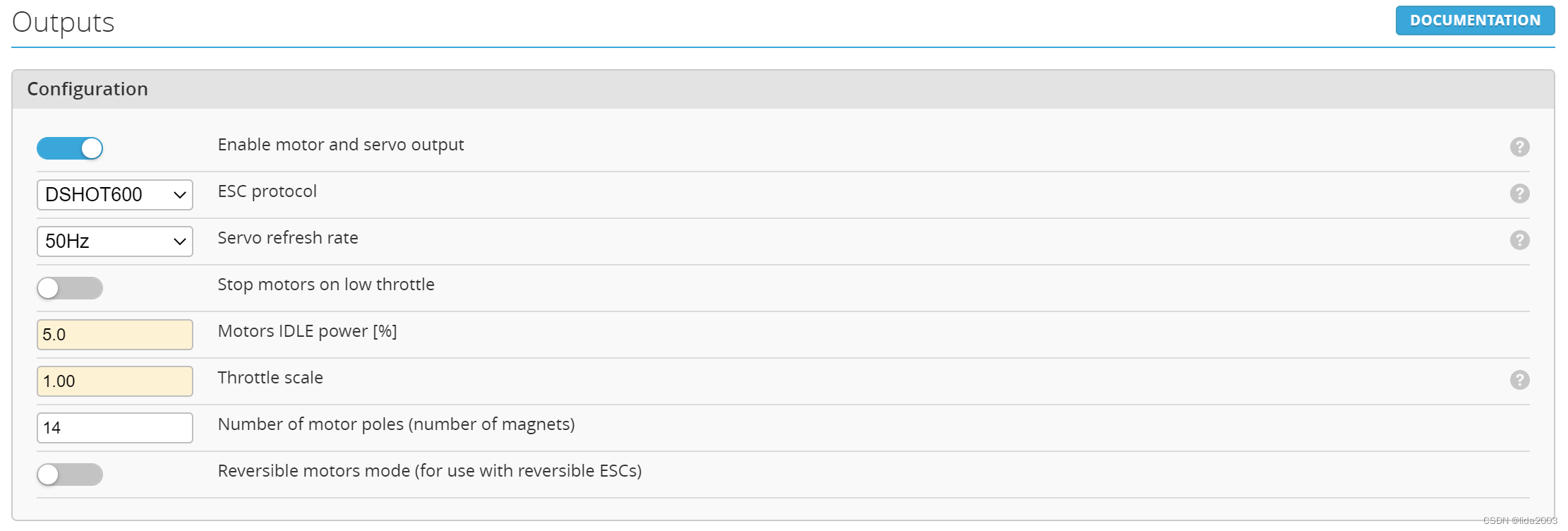
3.2 电调
iNav目前尚不支持bi-directional dshot电调协议,所以只能牺牲RPM转速。
注:如果真的很在意这个RPM转速相关的功能,比如:滤波,那么可以考虑32位电调。或者换BF/AMP固件(支持bdShot)。
详见:
【1】Bidirectional DShot #8658
【2】Bidirectional DShot #5549
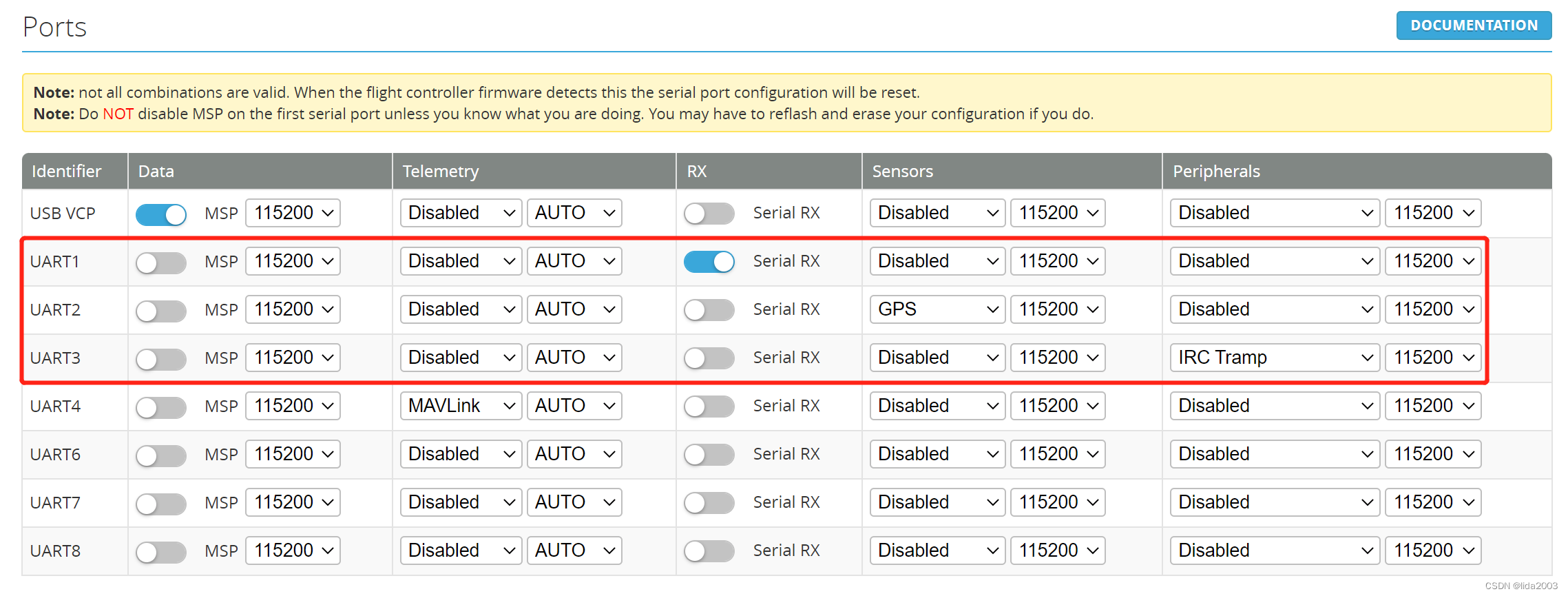
3.3 端口
三个串口配置:1)电传;2)GPS;3)图传
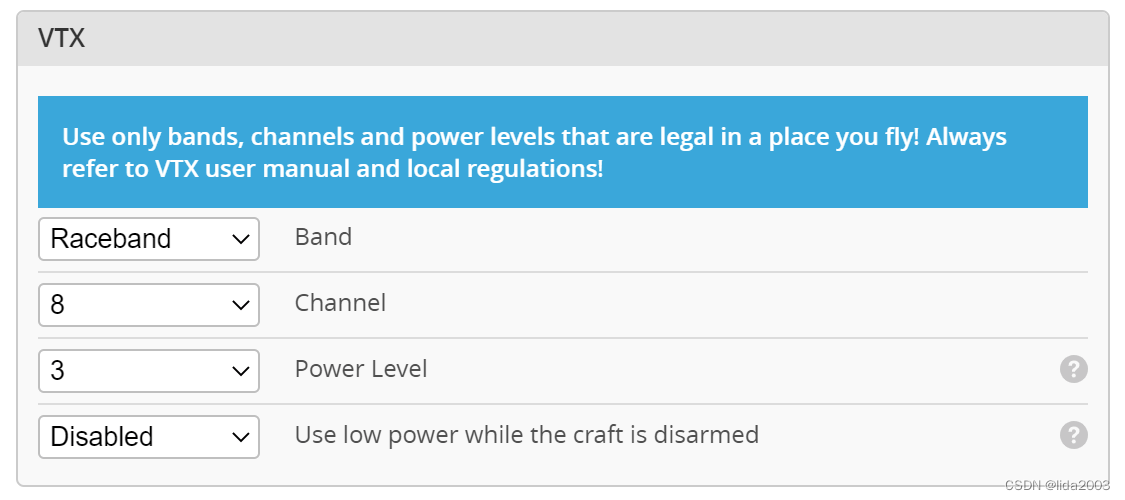
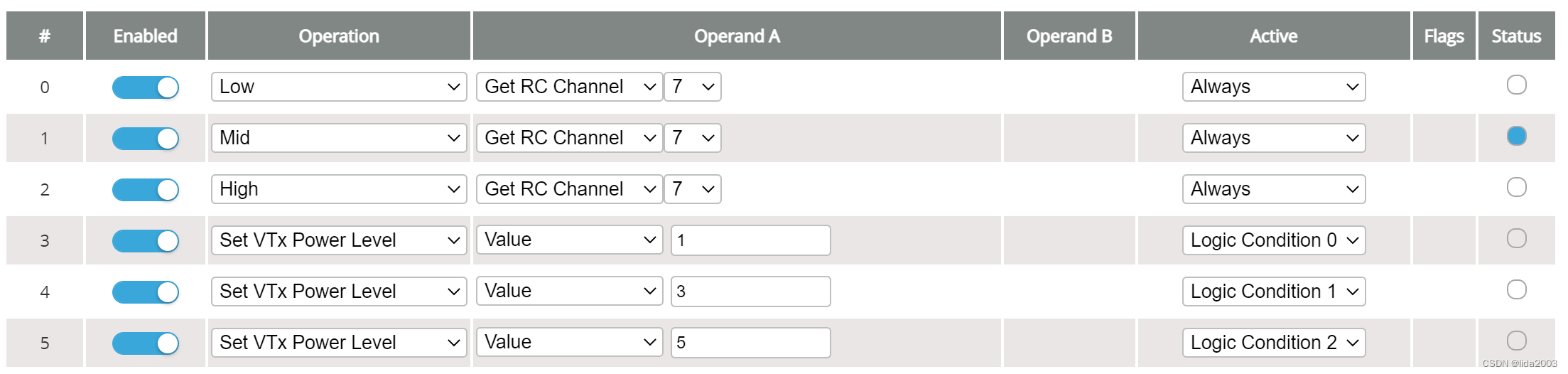
3.4 图传
频率设置:R8,默认PowerLevel = 3;
功率设置:1(25mW);3(200mW);5(600mW)
const uint16_t trampPowerTable_5G8_600[VTX_TRAMP_5G8_MAX_POWER_COUNT] = { 25, 100, 200, 400, 600 };
const char * const trampPowerNames_5G8_600[VTX_TRAMP_5G8_MAX_POWER_COUNT + 1] = { "---", "25 ", "100", "200", "400", "600" };
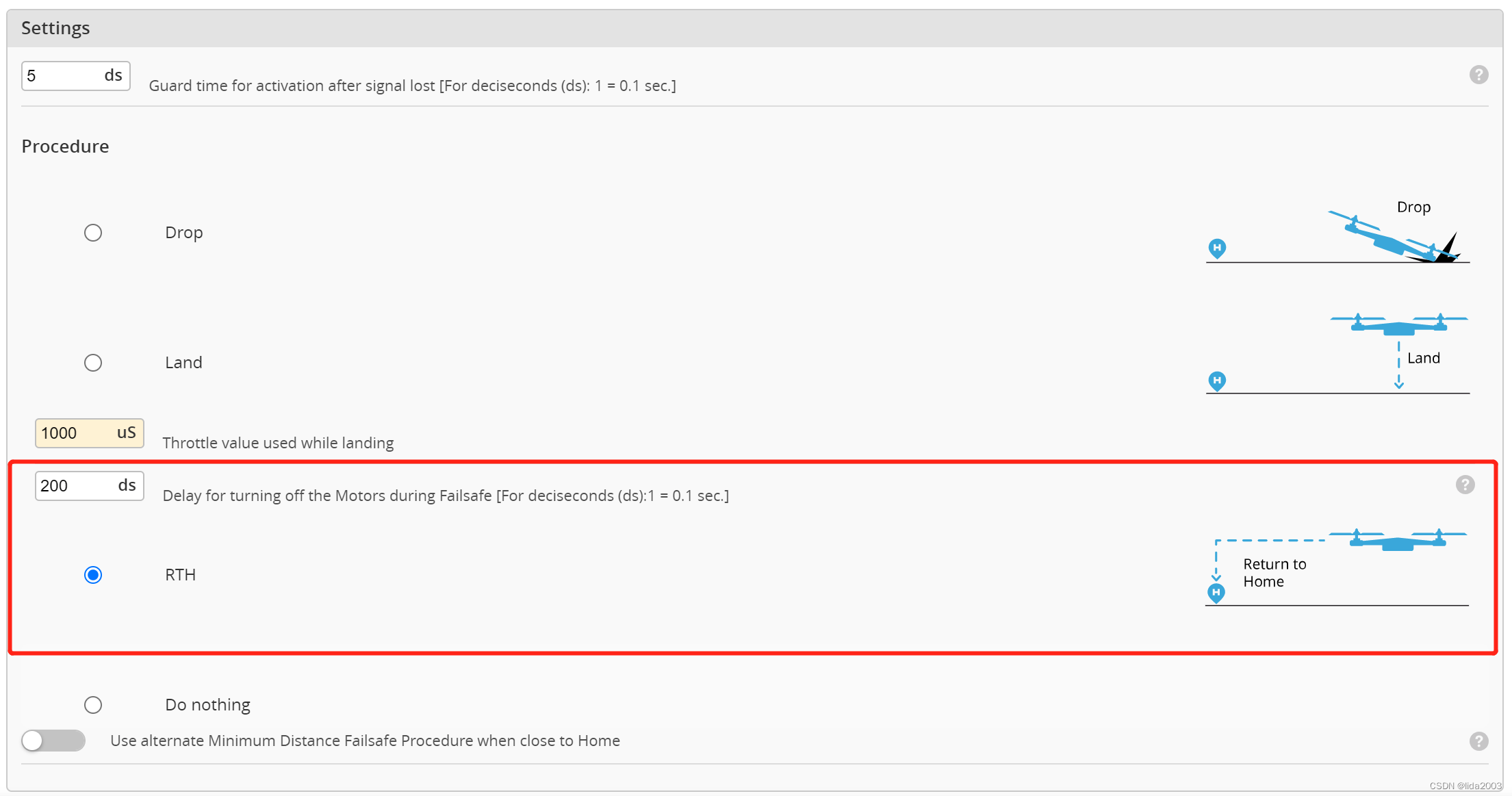
3.5 Failsafe
这里的Failsafe代表的是"Radio Failsafe”。
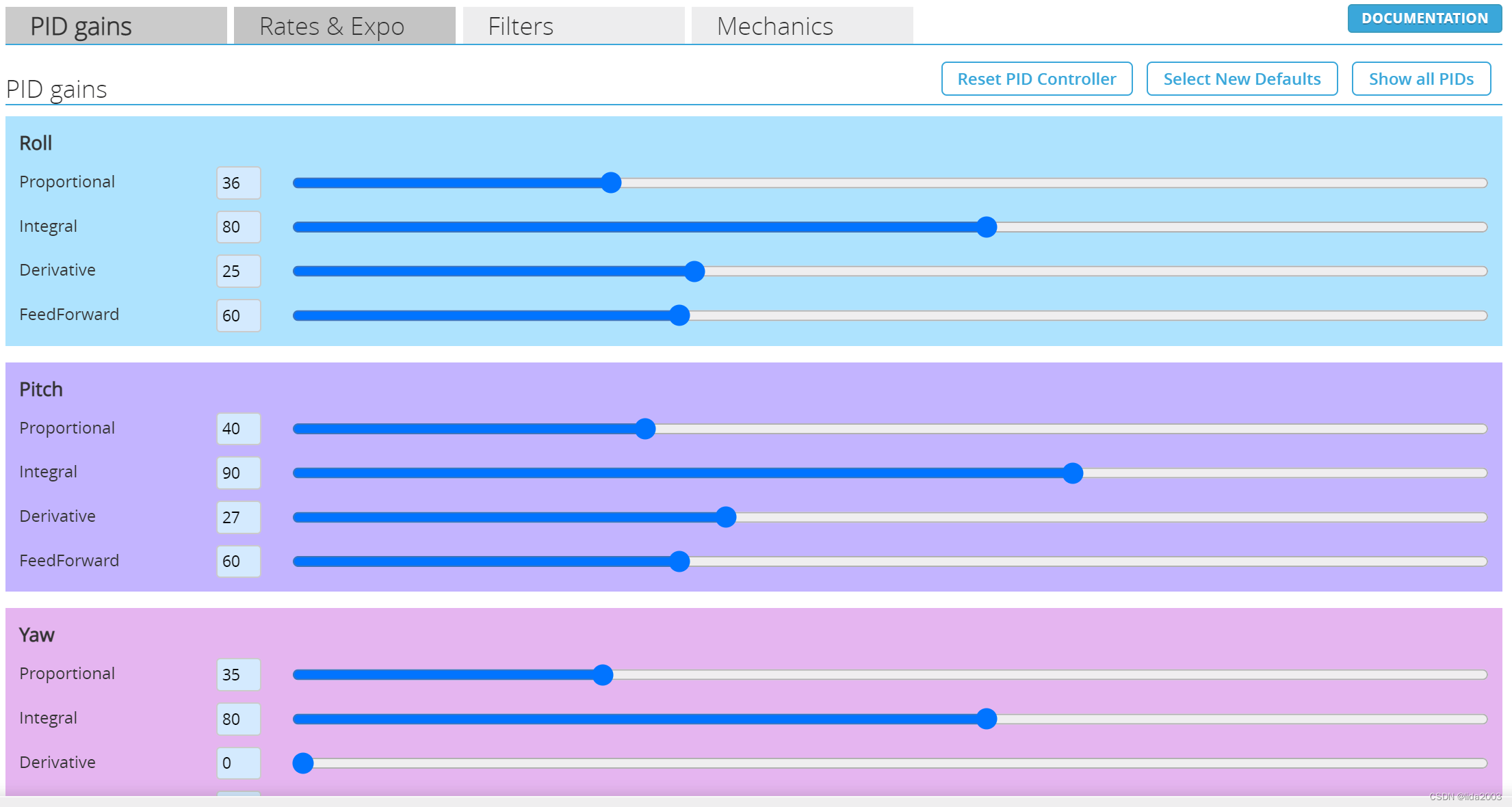
3.6 PID
默认PID使用的就是5寸机,未调整。
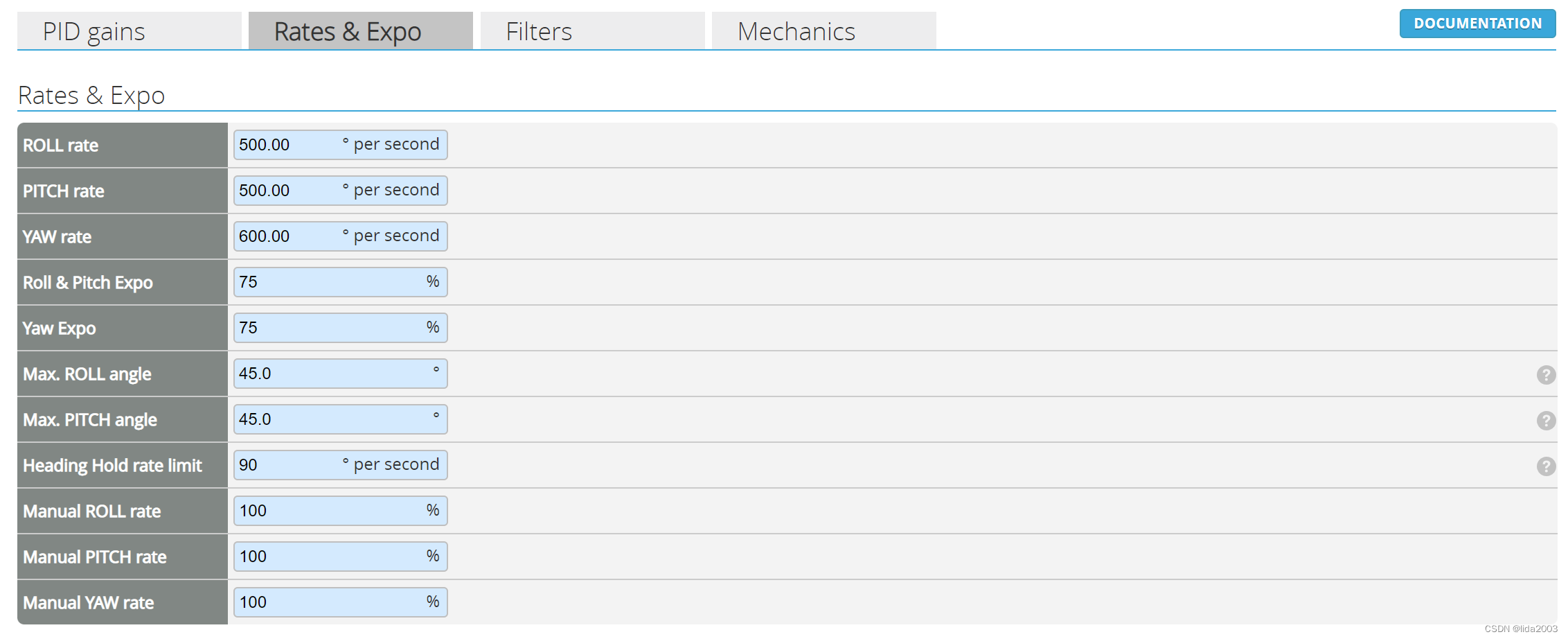
3.7 Rate
Roll/Pitch rate调整为500,原默认值700。
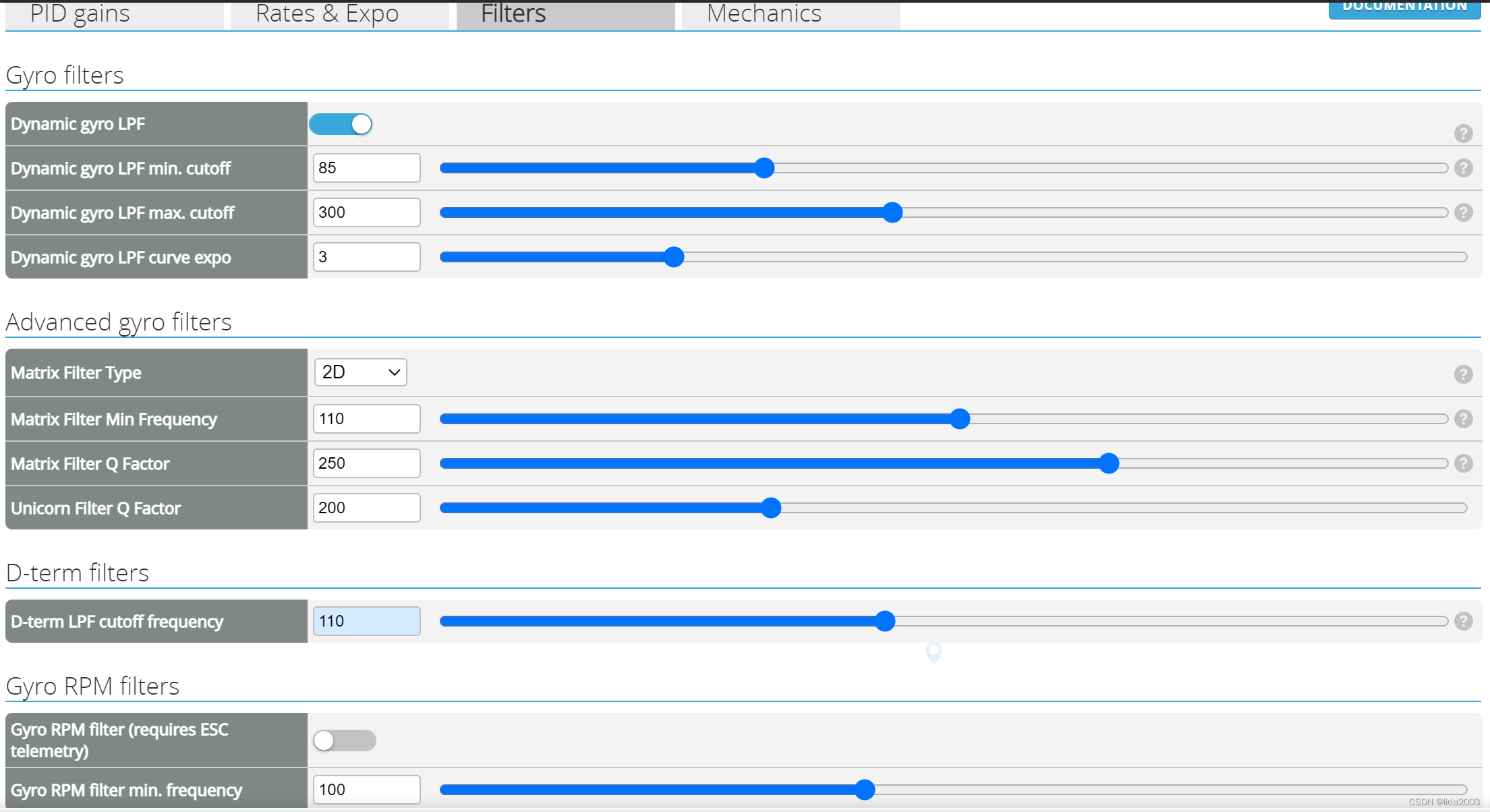
3.8 Filter
滤波参数,该110Hz正好将140,300左右两个振动频率过滤在外(详见:BetaFlight Mark4 H7 Dual270 + BN880 + CRSF 配置存档),未做调整。
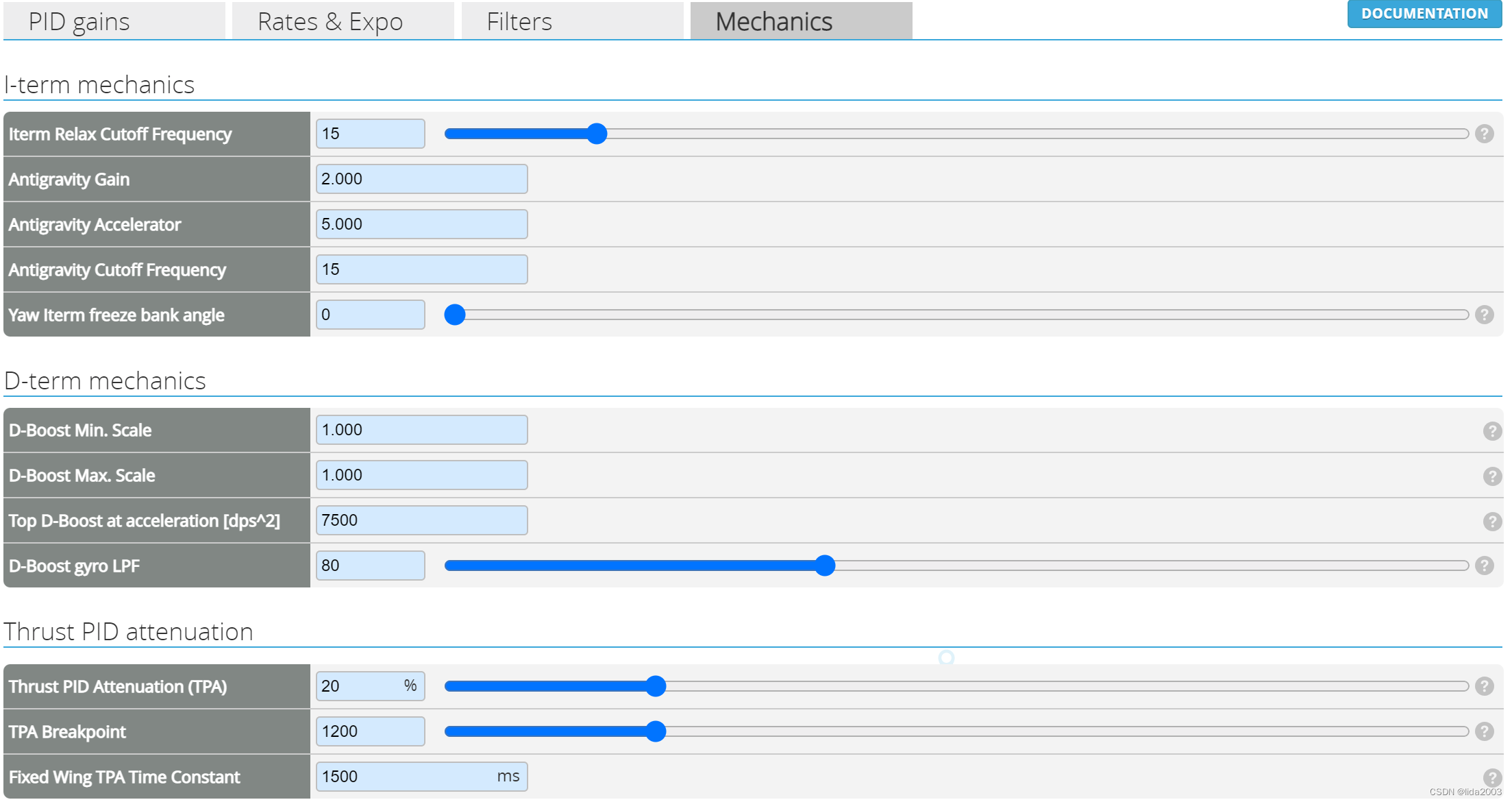
3.9 Mechanics
默认值
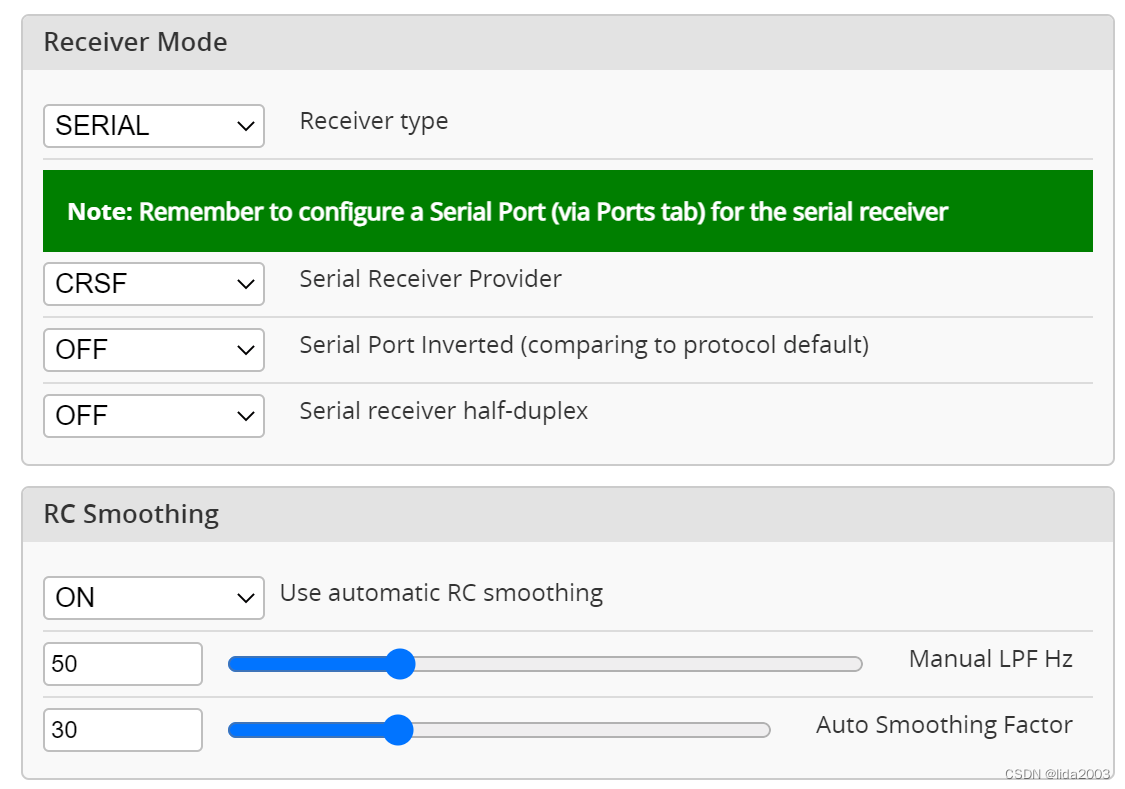
3.10 CRSF接收机
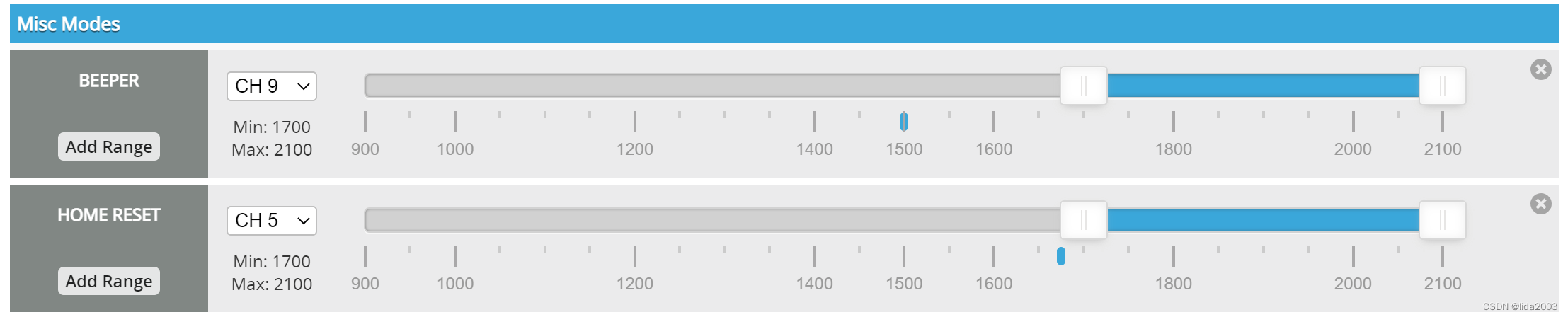
3.11 模式
上锁/解锁,若GPS尚未定位,可以使用组合按键【CH5 + Throttle Low Right】解锁,该情况下,无法使用GPS相关的RTL/posHold等智能功能。

 GPS相关智能功能
GPS相关智能功能
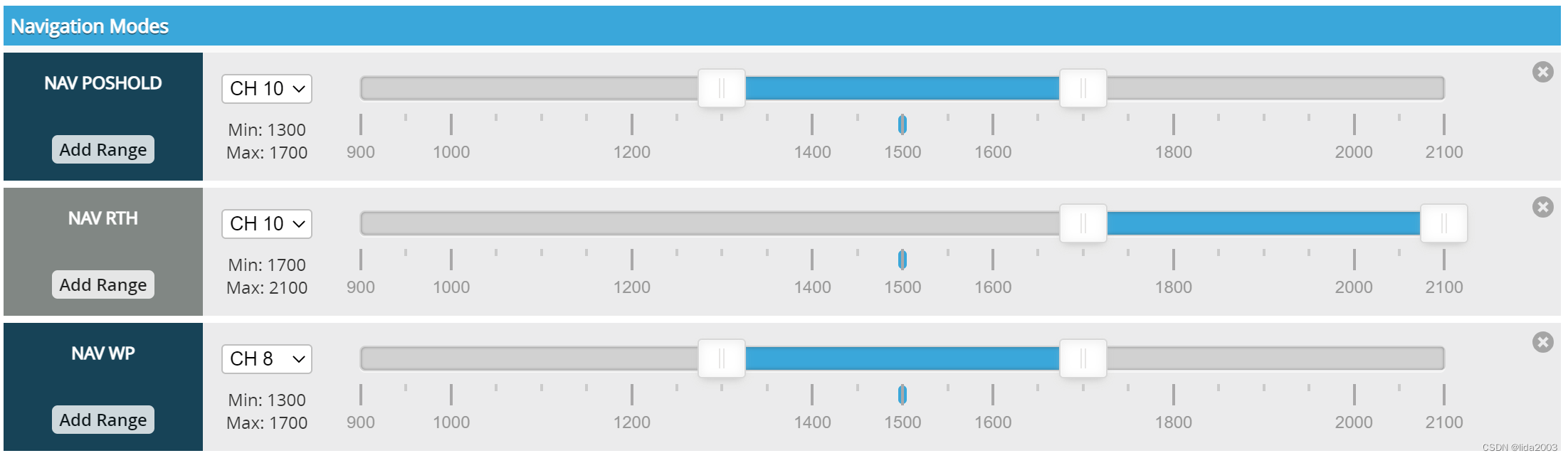 【HOME RESET】主要是为了HOME位置在解锁的时候进行重置。
【HOME RESET】主要是为了HOME位置在解锁的时候进行重置。
飞机飞行过程如果遇到意外,RTL回来做自动降落,那么就需要一个相对开阔的空间(GPS返航会有一定的着陆点位移)。
实际情况是,人通常在比较凉爽的树荫下,该地点作为着陆点就不太合适,我们会先飞到一个开阔地,上锁。然后在解锁进行飞行,此时着陆点就记住了这个开阔地。
黑匣子功能
这个PINIO非常重要,因为PINIO#1对应控制的是VTX的9V输出电源,以下配置,确保VTX9V始终输出。

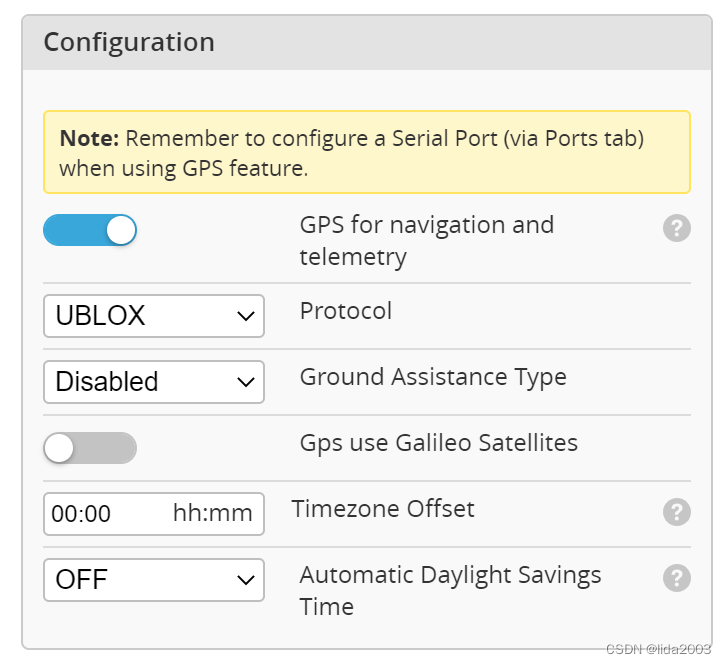
3.12 GPS
尽量使用UBLOX二进制协议,NMEA是字符串协议,且是单向通信。
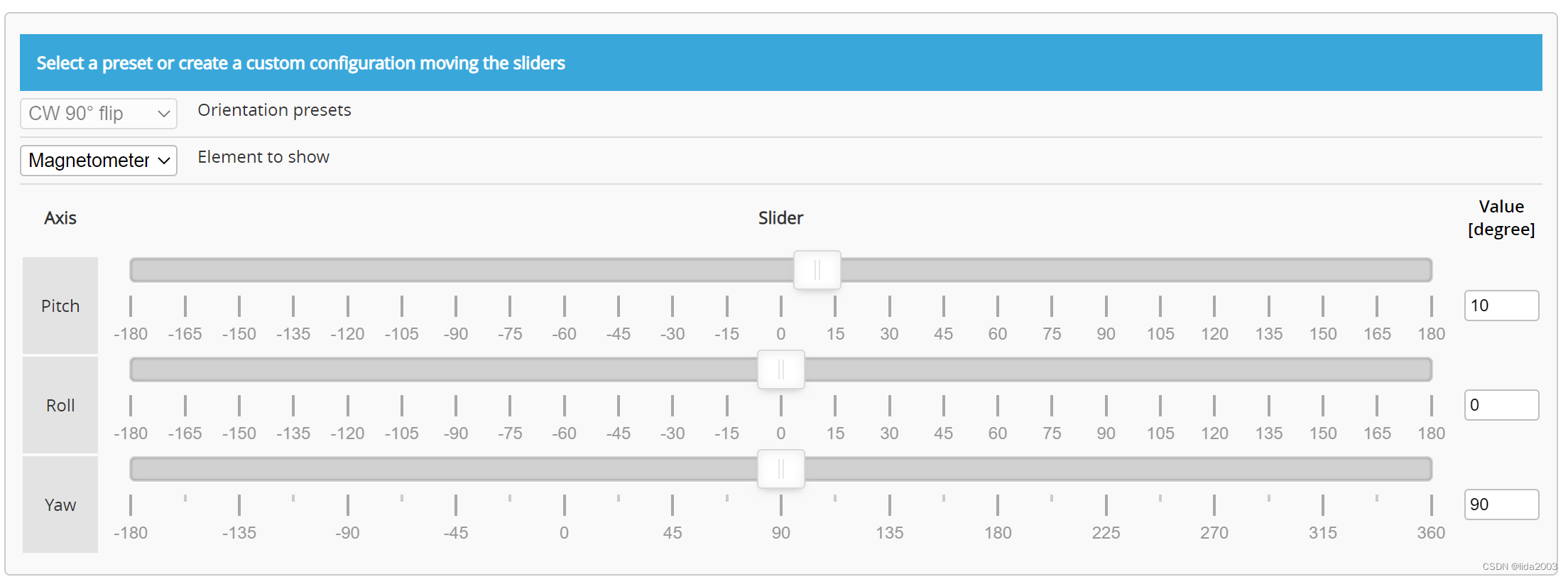
3.13 磁力计
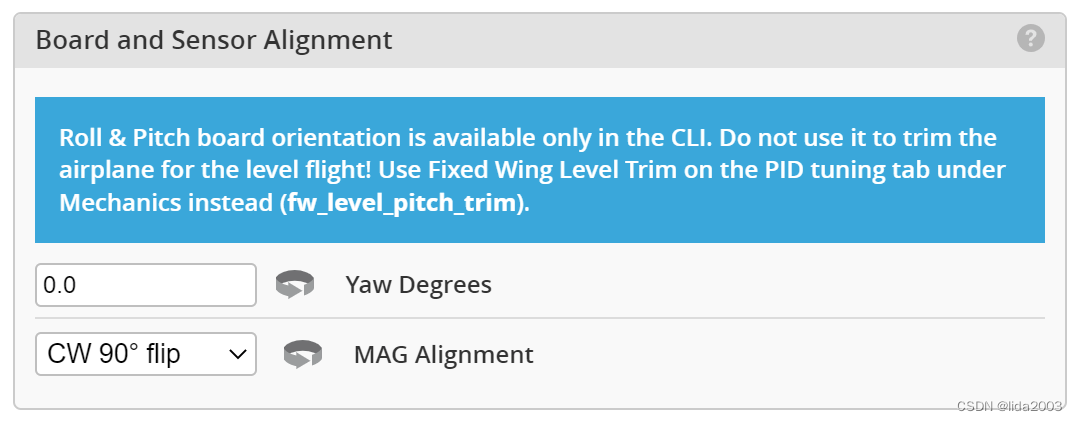
通常磁力计和GPS模块是在一起的,比如:GN880。
由于安装的时候会有一个倾角,所以需要适当的进行调整,下面打印件安装角度,大概有10度左右。

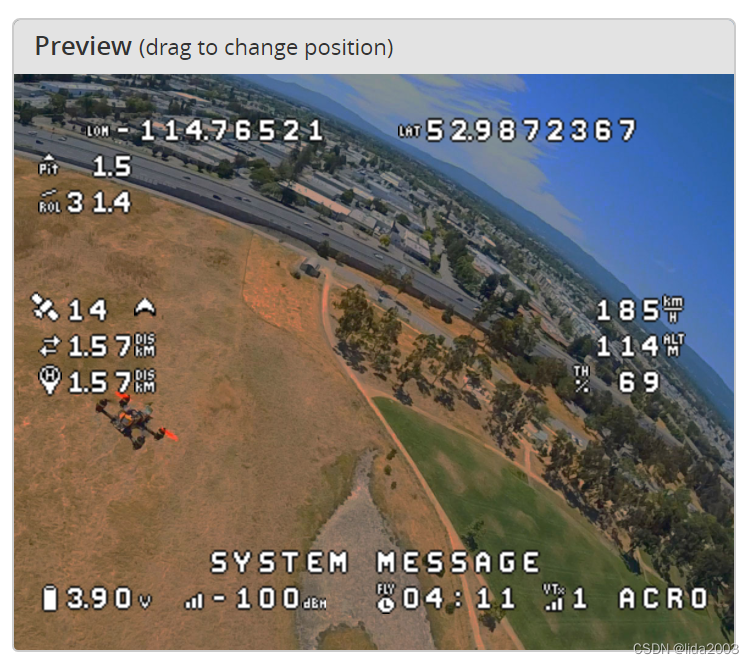
3.14 OSD
4. 总结
4.1 iNav 6.1.1 Mark4 RTH & Radio Failsafe
iNav 6.1.1 Mark4 RTH & Radio Failsafe
4.2 iNav 6.1.1 Mark4 城北公园 全程巡航
iNav 6.1.1 Mark4 城北公园 全程巡航
4.3 iNav 6.1.1 Mark4 冷启动4分钟10颗GPS + 3S-2200mAh 低空续航
iNav 6.1.1 Mark4 冷启动4分钟10颗GPS + 3S-2200mAh 低空续航
4.4 Mark4 iNav手动翻滚 | 冷启动GPS搜星 | H743蜂鸣器
Mark4 iNav手动翻滚 | 冷启动GPS搜星 | H743蜂鸣器 | 御用飞场
4.5 遗留问题
目前发现一个问题:黑匣子数据只能通过Inav-configurator 6.1.0导出TXT文件。BB文件无法使用msc方式获取。
详见:inav 6.1.1 cli msc enter usb mode, request for the USB device descriptor failed. #9155
5. 参考资料
【1】iNav开源代码之AOCODARCH7DUAL蜂鸣器持续蜂鸣问题
【2】iNav飞控AOCODARC-F7MINI固件编译
【3】BetaFlight Mark4 H7 Dual270 + BN880 + CRSF 配置存档

















 880
880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









