









Ardupilot开源代码之Rover上路 - 后续1
1. 源由
纪念下今天折腾了一天,为此,特地撰文一篇。
将Ardupilot Rover折腾上路的艰辛历程记录下来,感兴趣的小伙盘也来指点下江山,帮我出出主意。
2. 问题汇总
2.1 问题1:飞控选择
做计划的时候,选择了手边的两块板子,当时考虑Kakute F7是因为有2.54的排针方便。
而实际情况是KAKUTE F7 AIO只有6个PWM,无法满足阿克曼车的控制,很多人会好奇了吧。
一个接收机就能玩的无人车,飞控竟然说还折腾不了。确实啊,这APM高大上呀,呵呵!
阿克曼无人车实际上是机器人底盘,所以人家有超精密的定位系统,这可有编码器啊。
好了,我们算下PWM IO:
- 电机PWM控制 1个IO
- 编码器 2个IO
- 伺服转向系统 1个IO
所有的加起来:(1 + 2) x 2 + 1 = 7个
注:前面还想装VTOL也存在IO问题:Left Wing Motor + Right Wing Motor + Left Wing Aileron + Right Wing Aileron + Left Tilt + Right Tilt + Elevator +Tail Motor =8个
2.2 问题2:飞控安装位置和固定
虽然四轴大量的焊接,但是要知道四轴飞机基本上结构上固定都是固定的,这个阿克曼的车,飞控固定在哪里?这个结构件哪里来,之前都没有考虑到?
好吧,从VTOL上面正好找到一个当时存在一些问题的结构,凑合着用;同时也注定了必须将飞控安装于Rover的最上层,以便更好的获取GPS信号。

2.3 问题3:各种插头、插座配套
为什么说插接头的重要性?
- 原有设计规格
购买的是阿克曼机器人底盘,其原来配套的是OpenCTR的那套主控,所以带来了一下底盘接口没有配套插座的问题:
- LED灯带 3线插座 //这个是不兼容的
- 转向Servo经典插座 //这个是兼容的
- 电机+编码器插座 //6pin插座不兼容
- 飞控安装与顶层
飞控安装的结构件有GPS,要求放在最开阔的位置,以便更好的GPS信号。
阿克曼车是分层的,电机,转向Servo、LED等都在底层。
如果像飞控那样焊死,到时候加装或者拆卸都涉及焊接问题。
因此最好的问题就是底层和控制两层进行插头/插座的分离。
最终决策:6pin 电机+编码器规格的插头插座 三套来解决电机、编码器、LED灯带、转向伺服的连接问题。
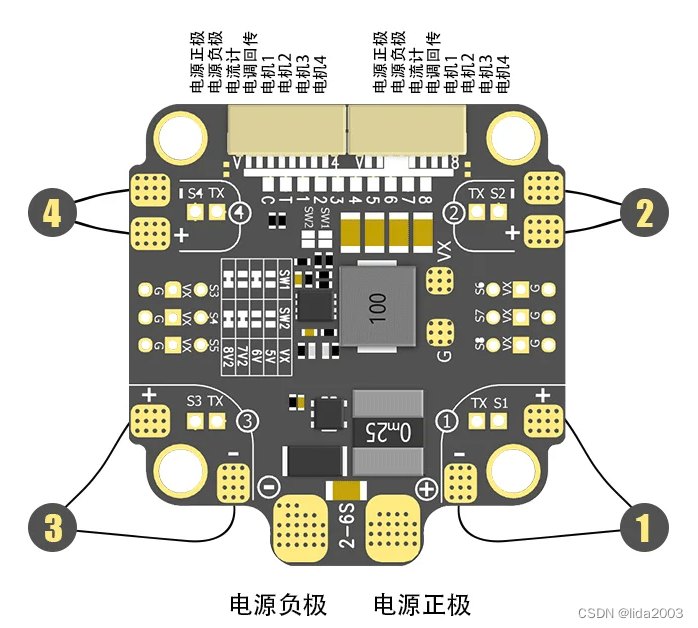
2.4 问题4:分电板缺陷
配套Aocoda-RC PDB 3060分电板,看上去至少感觉还是蛮不错的。但是依然存在几个问题:
- Servo经典插接3pin焊接焊盘太小,上锡非常不易; //焊盘太小
- S1/S2 没有Servo经典插接3pin;//有servo经典插接的只有6个PWM
- S3/S4/S5 S6/S7/S8排的很密,插线比较困难;
注:其实之前在VTOL上也遇到一些IO不够用问题,比如:四旋翼的VTOL。若能增加一个连接件,上层飞控能够引出4pin PWM扩展Servo经典接口(S/VX/GND)那就非常好了。
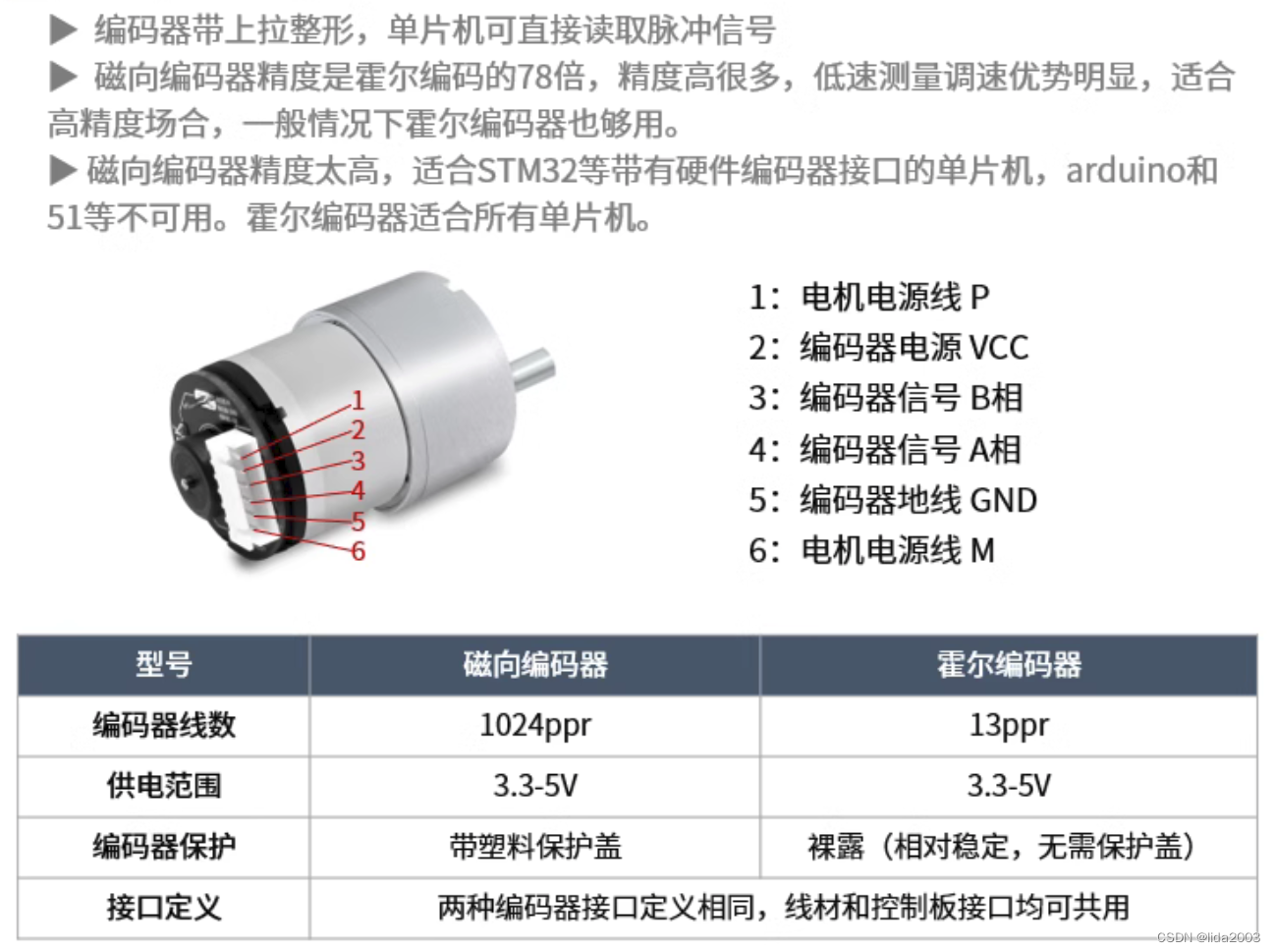
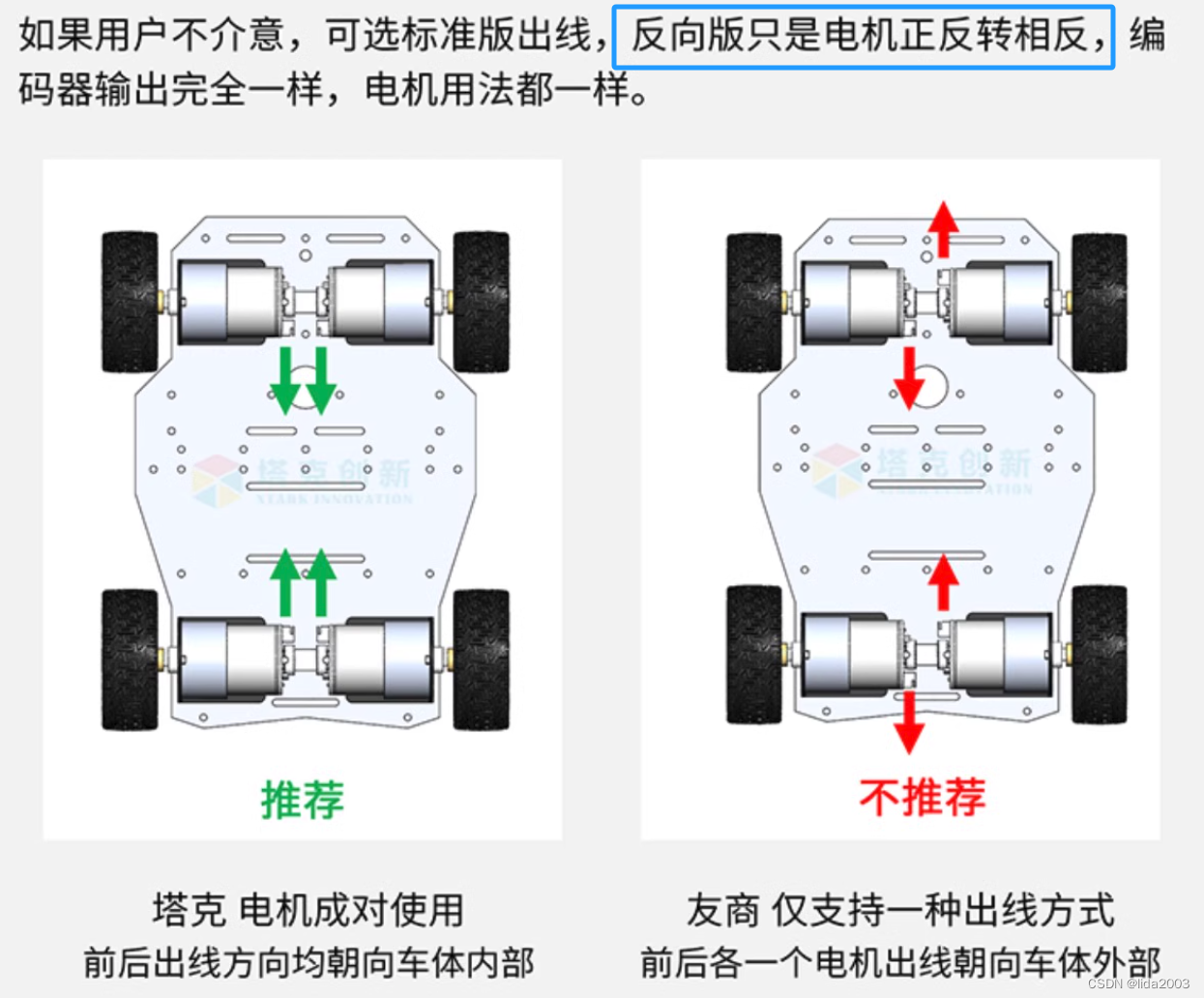
2.5 问题5:电机+编码器接线及正反向问题
装好的底盘,1024电机看不到什么标签因为在塑料壳子里面罩住了。
- 据反馈:标准版:654321,反向版:154326


这里有一个最终的问题就是:线序解法一致的情况下,同样PWM时,电机转向按照塔克官方设计,是能保证车子往前开,而不是原地转圈嘛???? — 有待验证,官方技术支持未回复,从资料上看,用户应该按照正常线序连接。
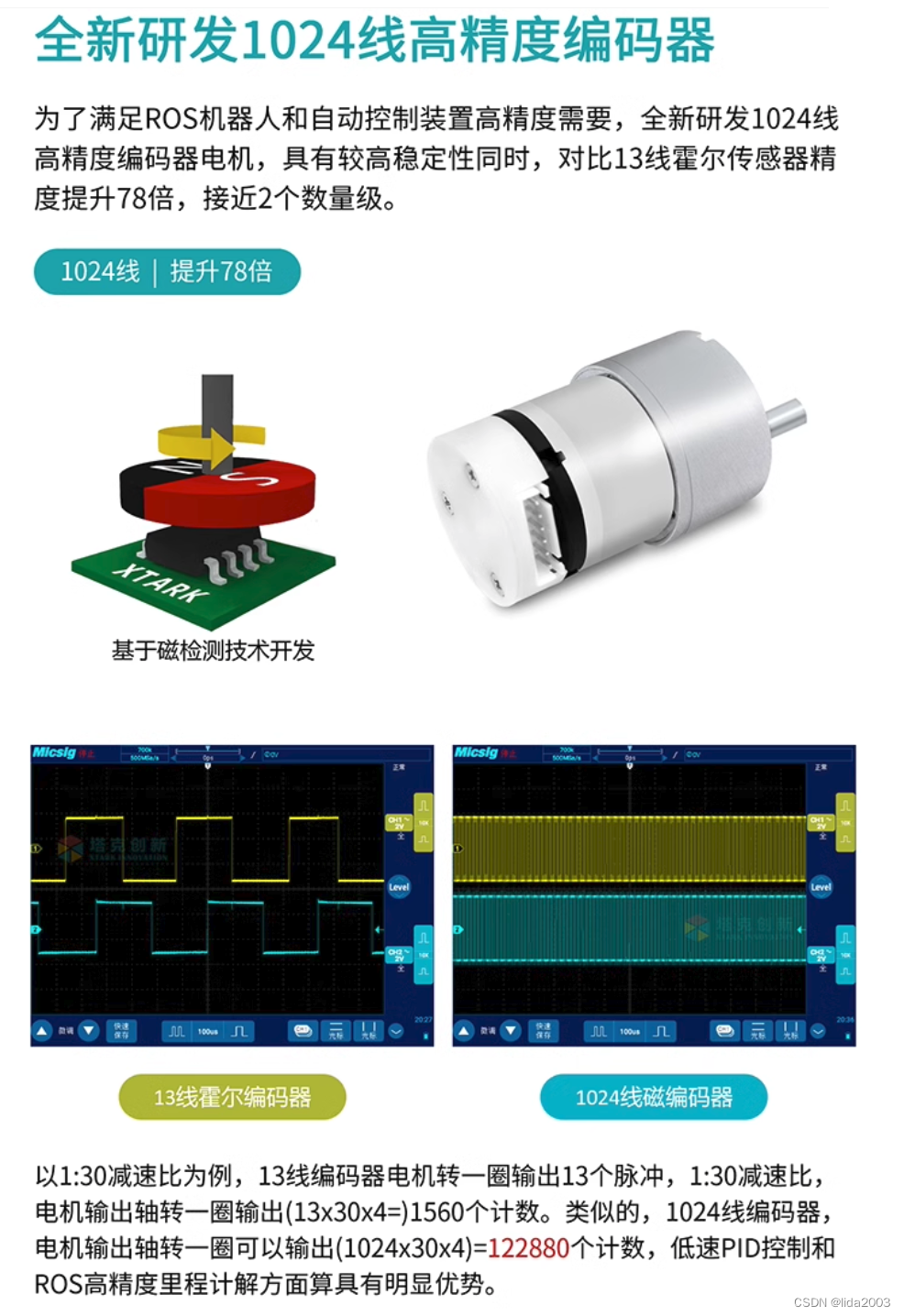
2.6 问题6:Ardupilot是否支持编码器?
- 一看到全新研发,我就害怕,这能和国际接轨不?????
- 例子:13个脉冲一圈,减速比1:30,为什么输出轴转一圈是 13 x 30 x 4 = 1560??? 这里的4是什么?Magic Number?
3. 基础知识
3.1 电机工作电压
貌似只能上3S,如果4S ~ 6S还得买降压模块,万幸!
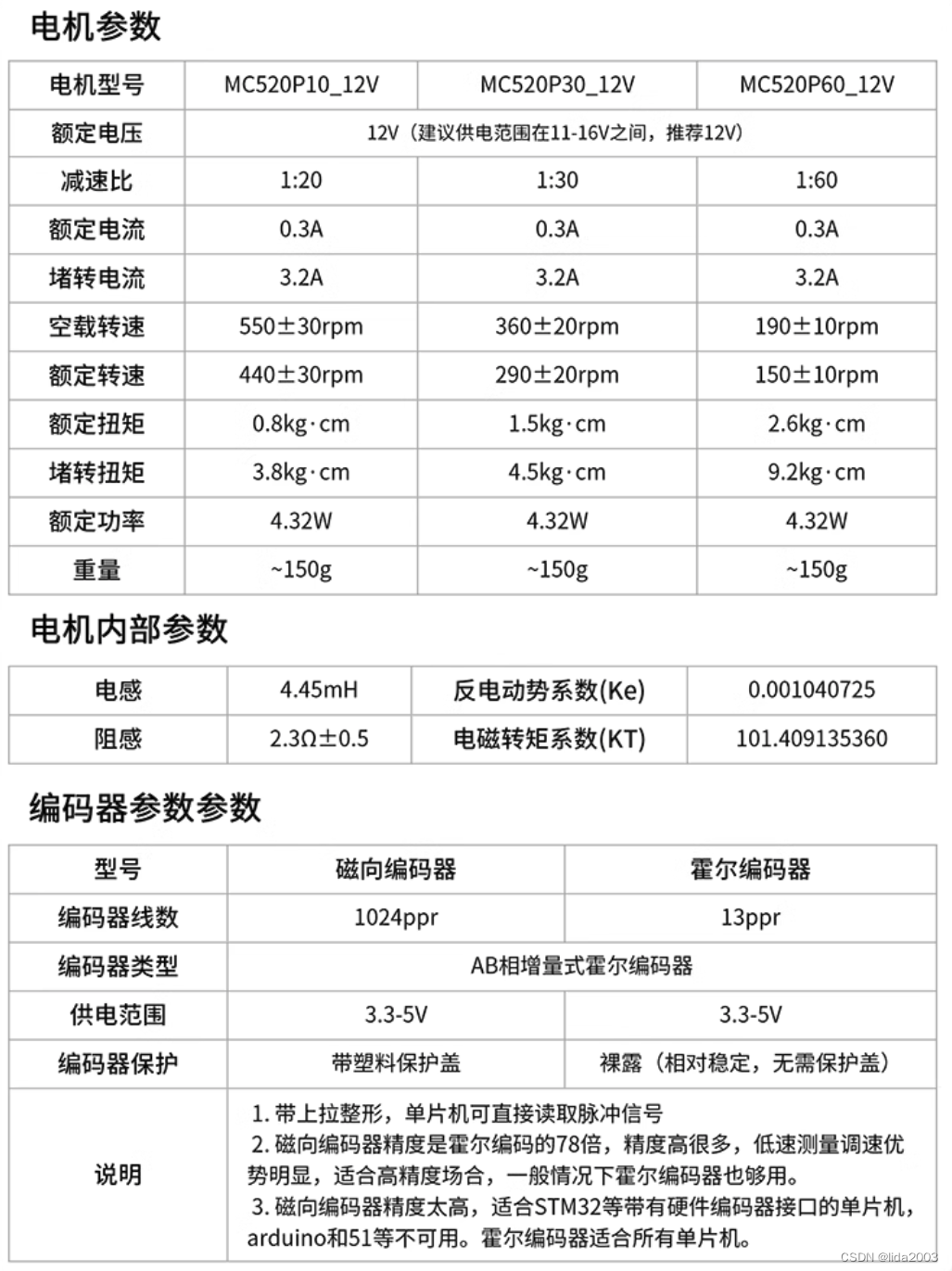
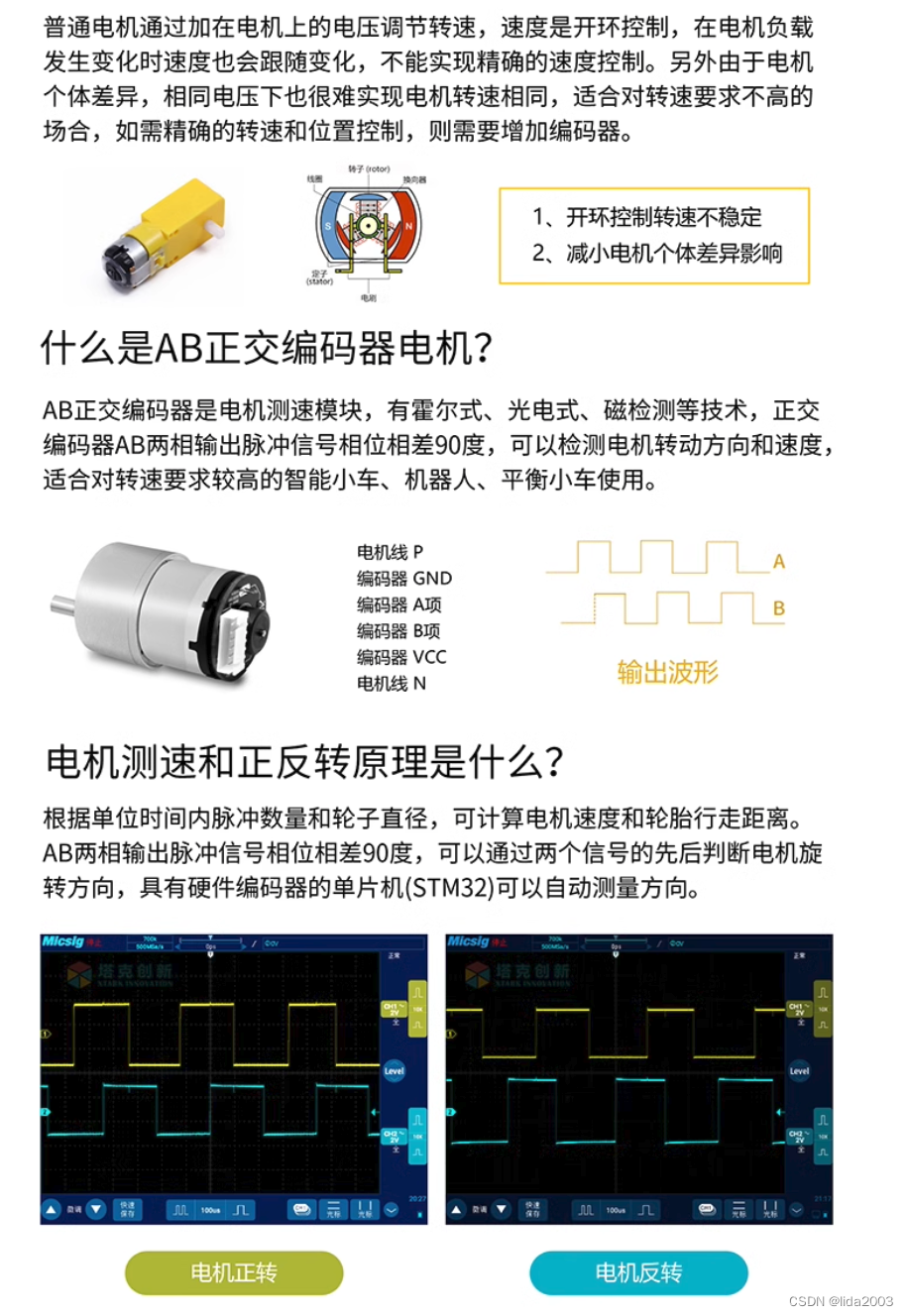
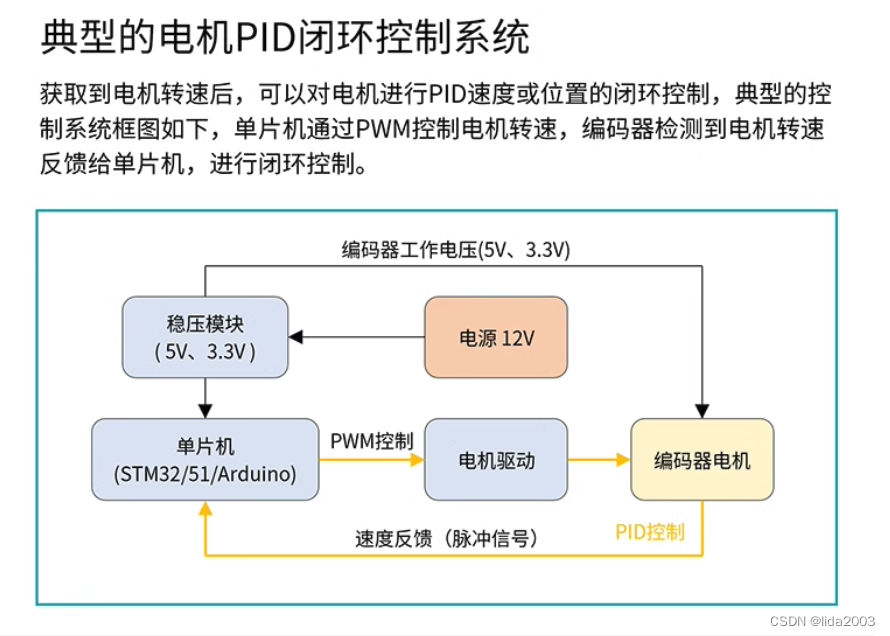
3.2 编码器工作原理
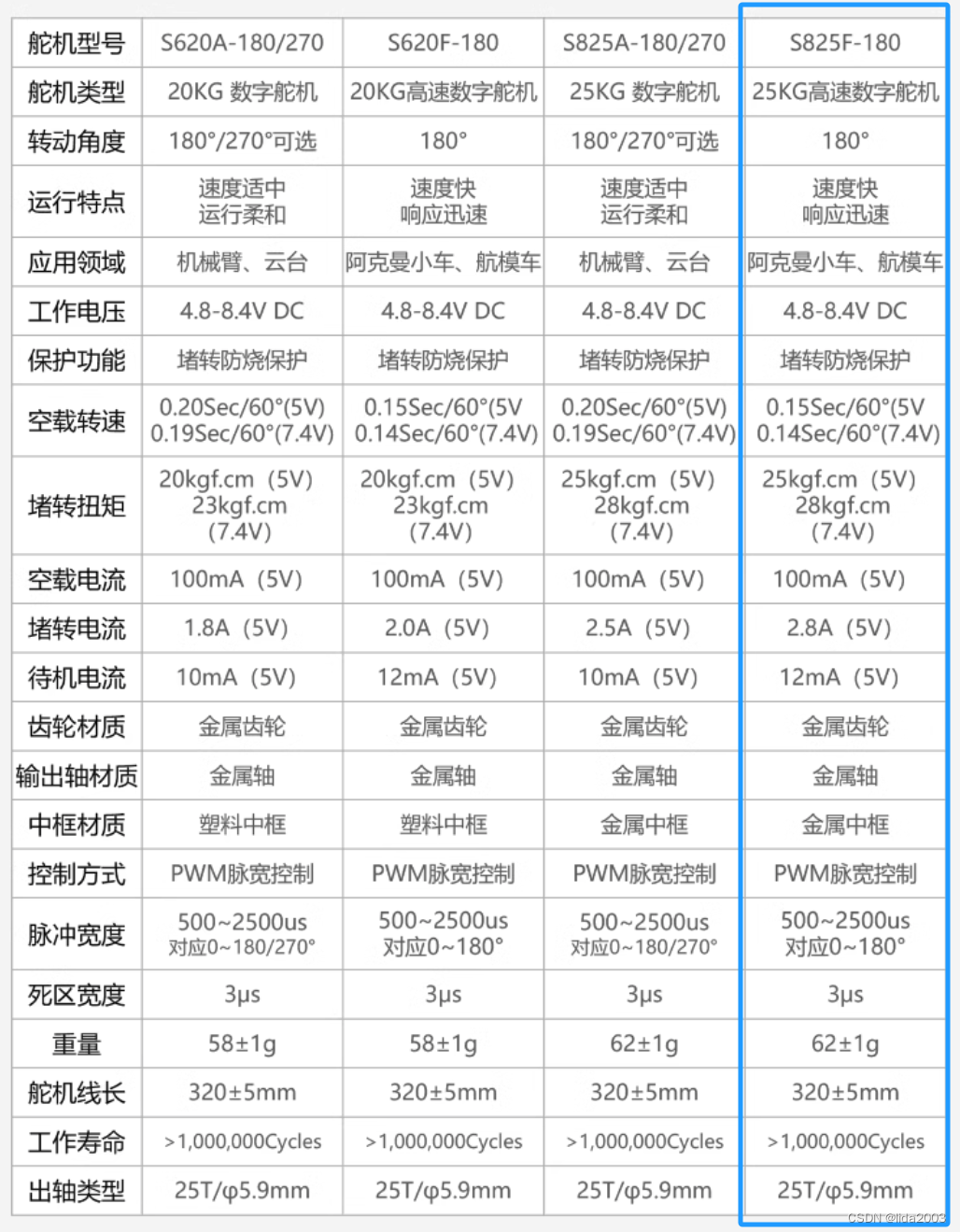
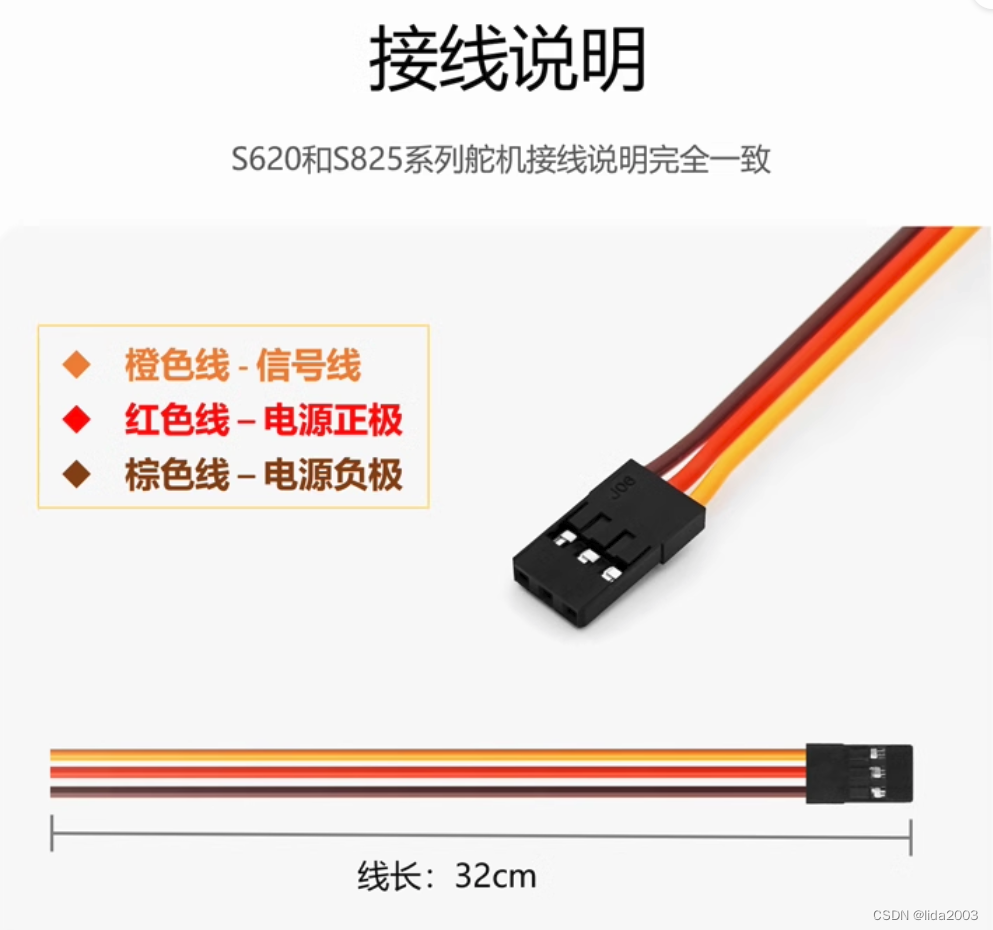
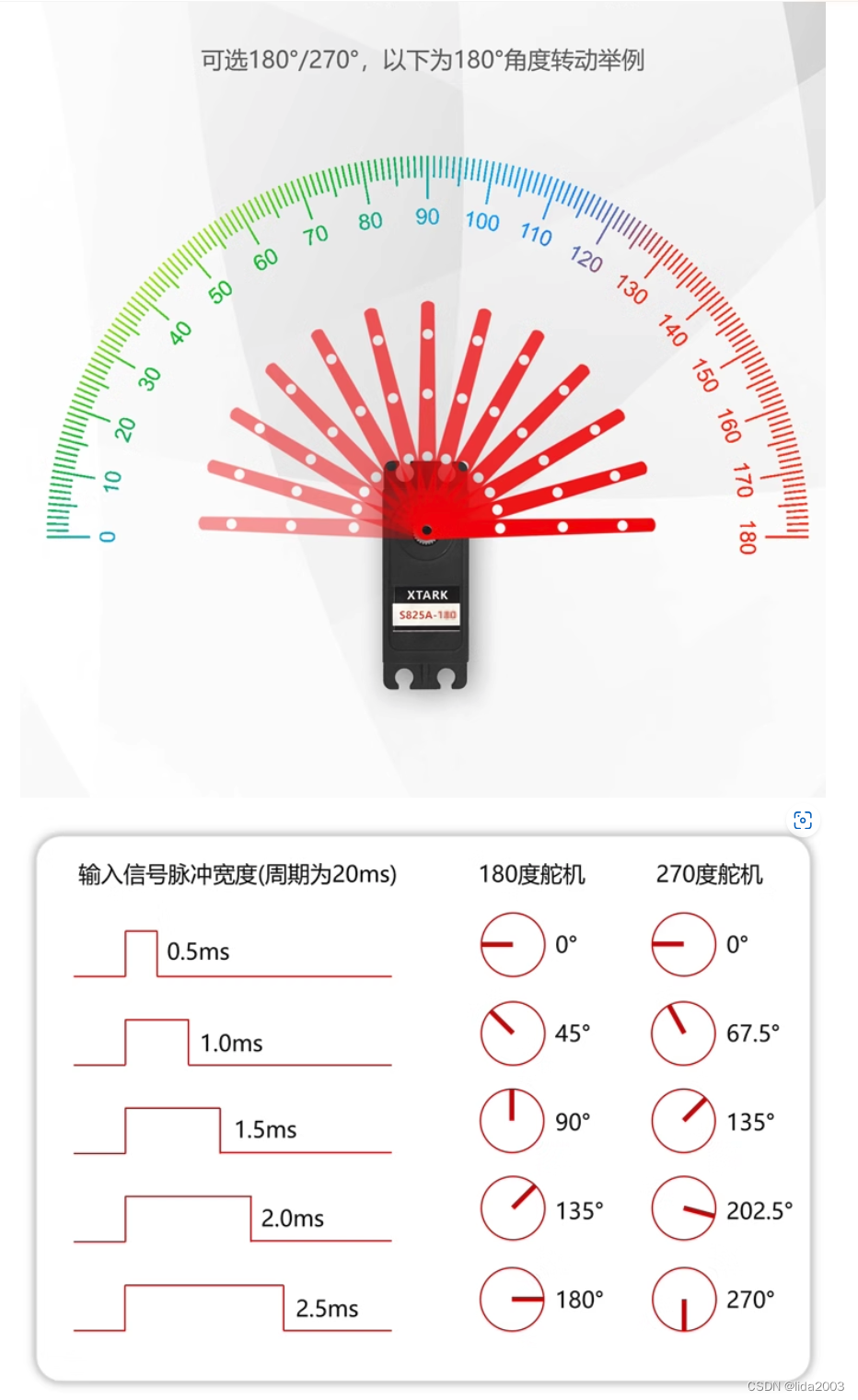
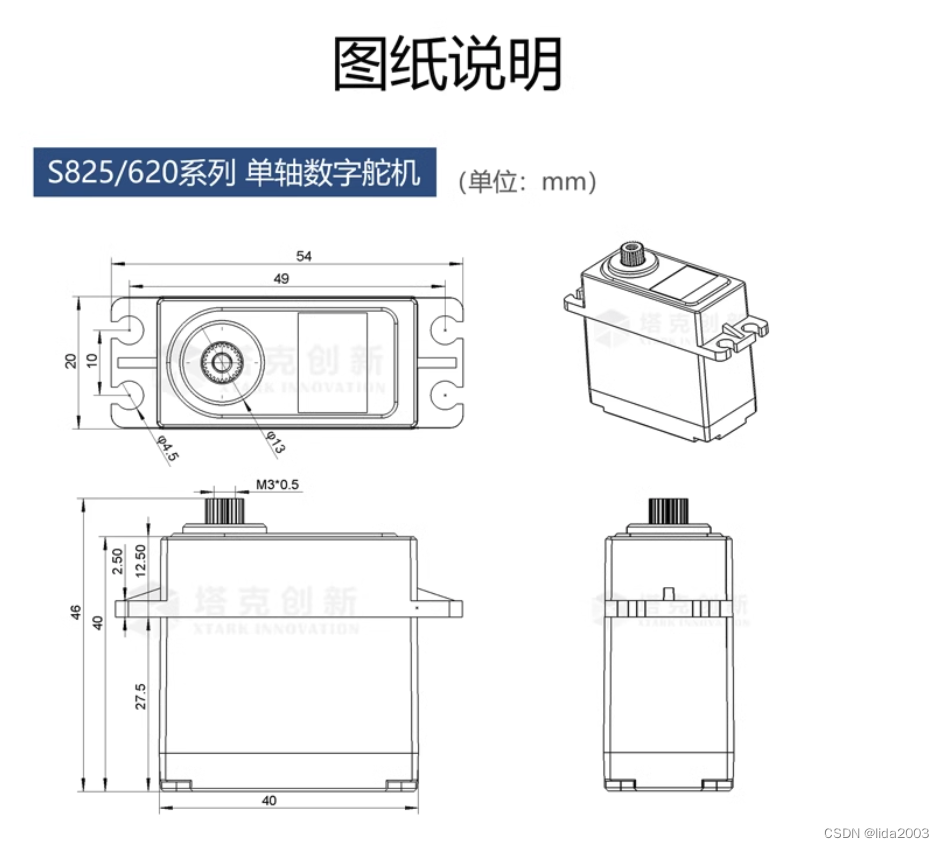
3.3 舵机工作原理
- 规格
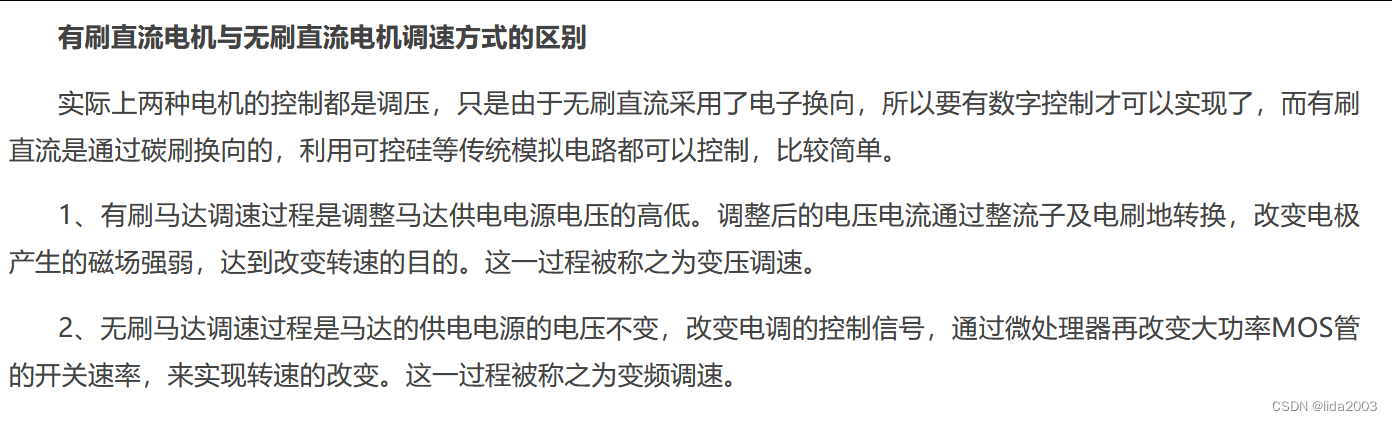
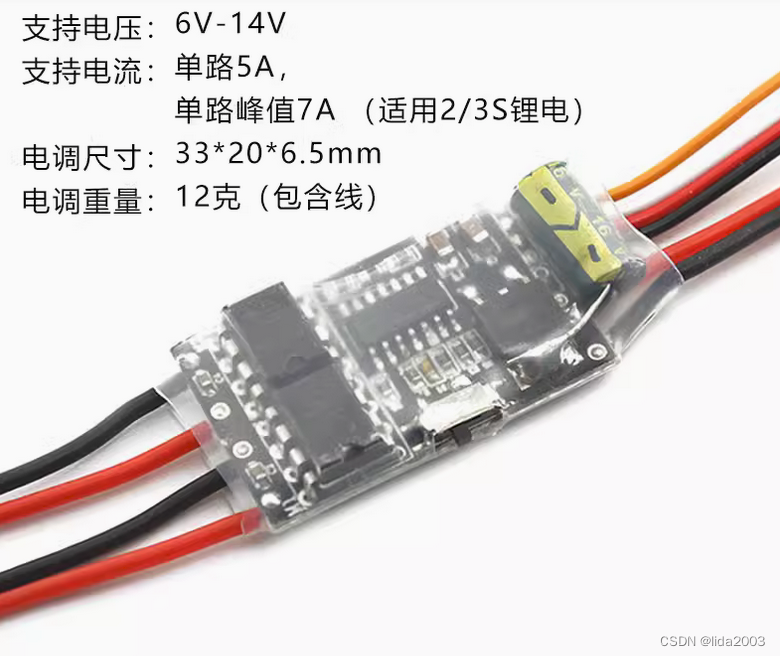
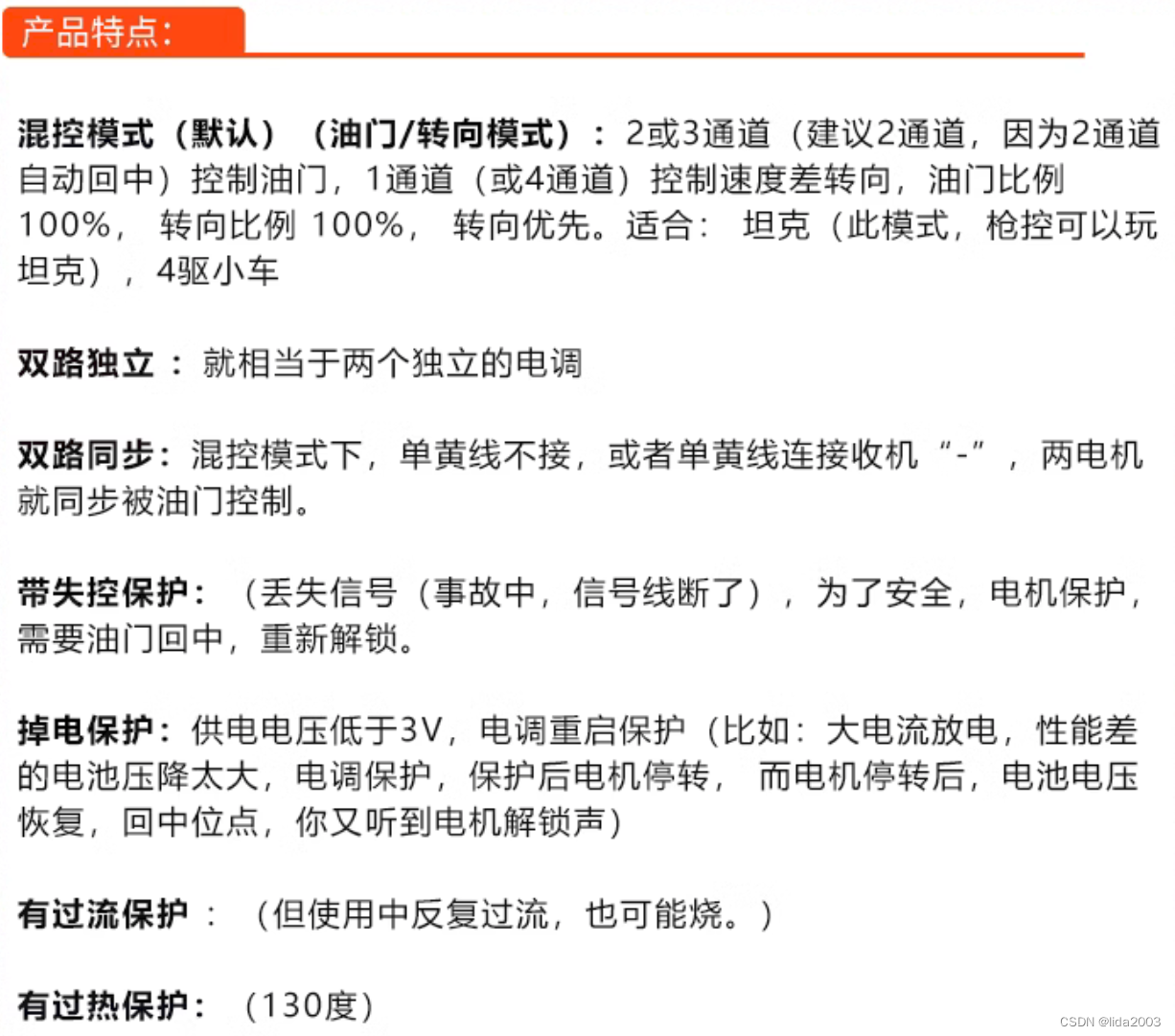
3.4 电调工作原理















 377
377











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









