0.实现效果
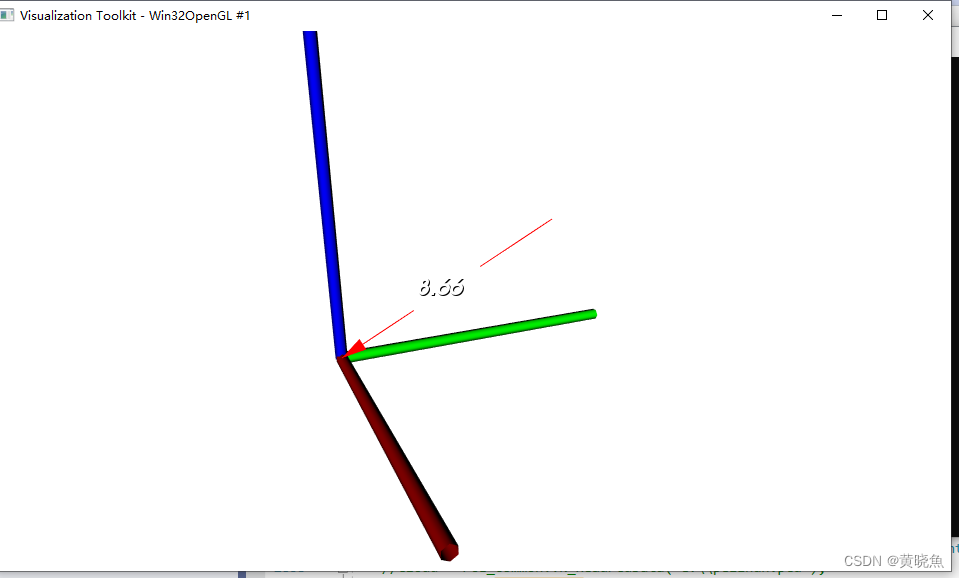
显示箭头
vtkOutputWindow::SetGlobalWarningDisplay(0);
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(1, 1, 1);
//添加箭头显示
pcl::PointXYZ pA(0, 0, 0);
pcl::PointXYZ pB(5, 5, 5);
viewer->addArrow<pcl::PointXYZ>(pA, pB, 255, 0, 0, true, "arrow", 0);
viewer->addCoordinateSystem(10);
viewer->initCameraParameters();
viewer->setCameraPosition(90, 90, 30, -0.5, -0.5, 0.7);
while (!viewer->wasStopped())
{
viewer->spinOnce(1000);
}
显示球体
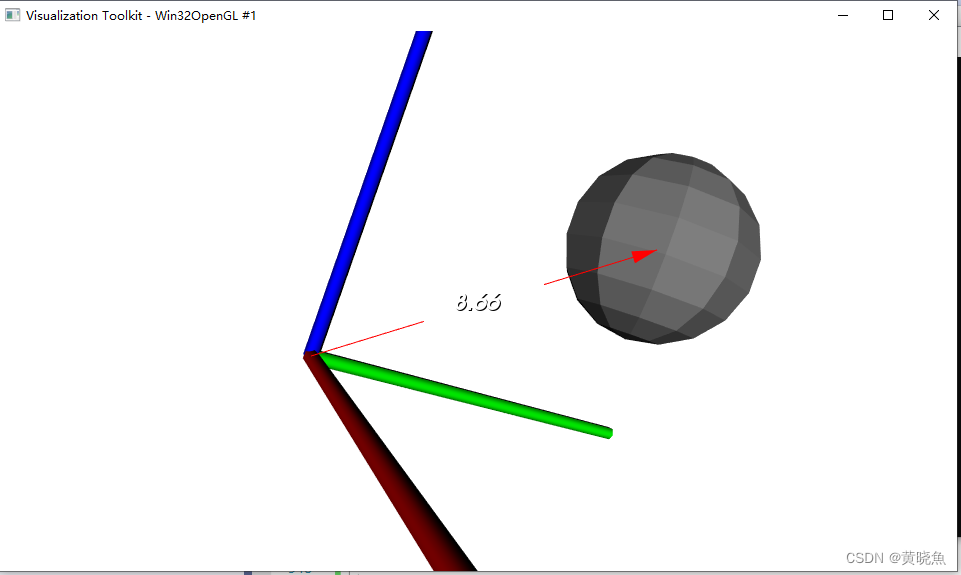
vtkOutputWind









 超级会员免费看
超级会员免费看


 订阅专栏 解锁全文
订阅专栏 解锁全文

















 218
218

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











