







姿态更新算法示例
以四元数为例
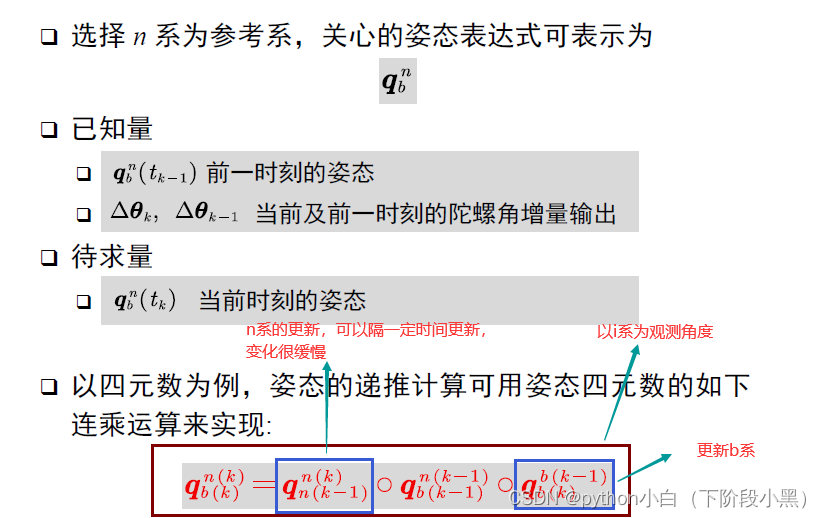
由上图可知:
已知量我们是需要前一历元的姿态(如果是第一步递推的话,那么就是初始对准的姿态),以及当前和前一历元的角增量(因为双子样解算)
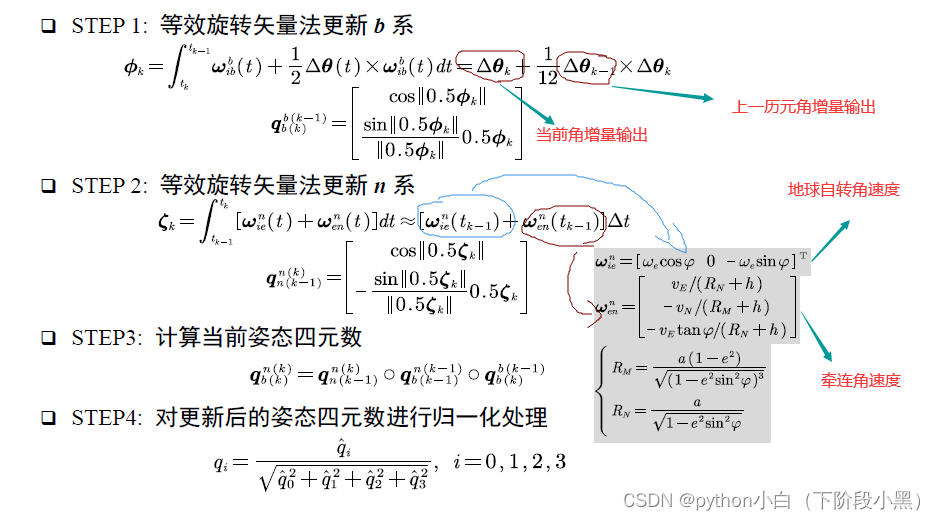
牵连角速度:载体在地球球面运动而造成的当地水平坐标系发生的角度变化率
惯导姿态算法小结
1.欧拉角:简单明了,概念直观,容易理解,当俯仰角接近90
度时方程出现退化现象,所以这种方法只适用于水平姿态变
化不大的情况,而不适用于全姿态运载体的姿态确定。
2.方向余弦矩阵:避免了方程退化的问题,可全姿态工作。但
包含了九个未知量的线性微分方程组,计算量大。
3.四元数:只需求解四个未知量的线性方程组,计算量比方向
余弦法小,且算法简单,易于操作。
4.等效旋转矢量:采用多子样算法,对不可交换误差做有效补
偿,算法关系简单,易于操作,并且通过对系数的优化处理
使算法漂移在相同子样算法中达到最小,因此特别适用于角
机动频繁激烈或存在严重角振动的运载体的姿态更新。















 714
714











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











