







1、增量PID的原理、增量PID的最后公式
2、增量PID的代码;
3、stm32F4实现调节电机的速度。
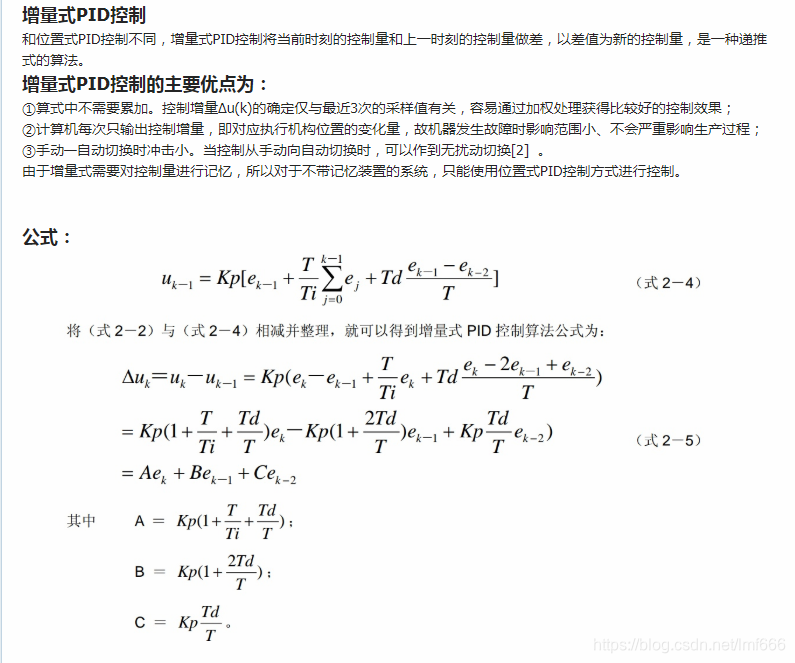
1、增量PID
代码
//定义PID结构体
typedef struct
{
__IO int SetPoint; //设定目标 Desired Value
__IO float Proportion; //比例常数 Proportional Const
__IO float Integral; //积分常数 Integral Const
__IO float Derivative; //微分常数 Derivative Const
__IO int LastError; //Error[-1]
__IO int PrevError; //Error[-2]
}PID;
/* 私有宏定义 ----------------------------------------------------------------*/
/*************************************/
// 定义PID相关宏
// 这三个参数设定对电机运行影响非常大
// PID参数跟采样时间息息相关
/*************************************/
#define P_DATA 0.4 // P参数
#define I_DATA 0.3 // I参数
#define D_DATA 0.1 // D参数
static PID sPID;
static PID *sptr = &sPID;
/* 扩展变量 ------------------------------------------------------------------*/
/* 私有函数原形 --------------------------------------------------------------*/
void IncPIDInit(void);
int32_t IncPIDCalc(int16_t NextPoint);
if(KEY1_StateRead()==KEY_DOWN) // 增速
{
/* 设置目标速度 */
sptr->SetPoint +=50; //50 pulse
}
if(KEY2_StateRead()==KEY_DOWN) // 减速
{
/* 设置目标速度 */
sptr->SetPoint -=50;
}
if(start_flag) // 等待脉冲输出后才开始计时
{
time_count++; // 每1ms自动增一
if(time_count==200)
{
__IO int16_t count;
__IO int para;
/* 得到编码器计数值,200ms内的编码器数值,数值越大说明速度越大 */
count = (int16_t)__HAL_TIM_GET_COUNTER(&htimx_Encoder);
/* 计数得到增量式PID的增量数值 */
para=IncPIDCalc(count);
/* 根据增量数值调整当前电机速度 */
PWM_Duty +=para;
if(PWM_Duty>999)PWM_Duty=1000;
if(PWM_Duty<0)PWM_Duty=0;
/* 对速度值进行简单的处理, */
cal += count*(1000/time_count); // 单位转换成秒//并累加
i++;
if(i==(1000/time_count))
{
i=0;
cal /= (1000/time_count); // 求平均,1s内采样5次
// 11:编码器线数(转速一圈输出脉冲数),编码器4倍频
// 34:电机减数比,内部电机转动圈数与电机输出轴转动圈数比,即减速齿轮比
printf("Speed %.2f r/s\n",cal/(11*4)/34);
cal = 0;
}
__HAL_TIM_SET_COUNTER(&htimx_Encoder,0);
L298N_DCMOTOR_Contrl(1,PWM_Duty);
time_count=0;
}
}
/*********************PID参数初始化********************************/
void IncPIDInit(void)
{
sptr->LastError=0; //Error[-1]
sptr->PrevError=0; //Error[-2]
sptr->Proportion=P_DATA; //比例常数 Proportional Const
sptr->Integral=I_DATA; //积分常数 Integral Const
sptr->Derivative=D_DATA; //微分常数 Derivative Const
sptr->SetPoint=300; //设定目标Desired Value
}
/********************增量式PID控制设计************************************/
/**
* 函数名称:增量式PID控制设计
* 输入参数:当前控制量
* 返 回 值:目标控制量
* 说 明:无
*/
int32_t IncPIDCalc(int16_t NextPoint)
{
int iError,iIncpid = 0; //当前误差
iError=sptr->SetPoint-NextPoint; //增量计算
if( iError<3 && iError>-3 ) //误差在正负3以内,则不做处理
return iIncpid;
iIncpid=(sptr->Proportion * iError) //E[k]项
-(sptr->Integral * sptr->LastError) //E[k-1]项
+(sptr->Derivative * sptr->PrevError); //E[k-2]项
sptr->PrevError=sptr->LastError; //存储误差,用于下次计算
sptr->LastError=iError;
return(iIncpid); //返回增量值
}

















 6583
6583

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









