




目录
ODrive、VESC和SimpleFOC 教程链接汇总:请点击
一、设备说明
1、驱动器使用移植后的VESC4,移植说明 请看这篇文章:VESC简介与国产替代方案

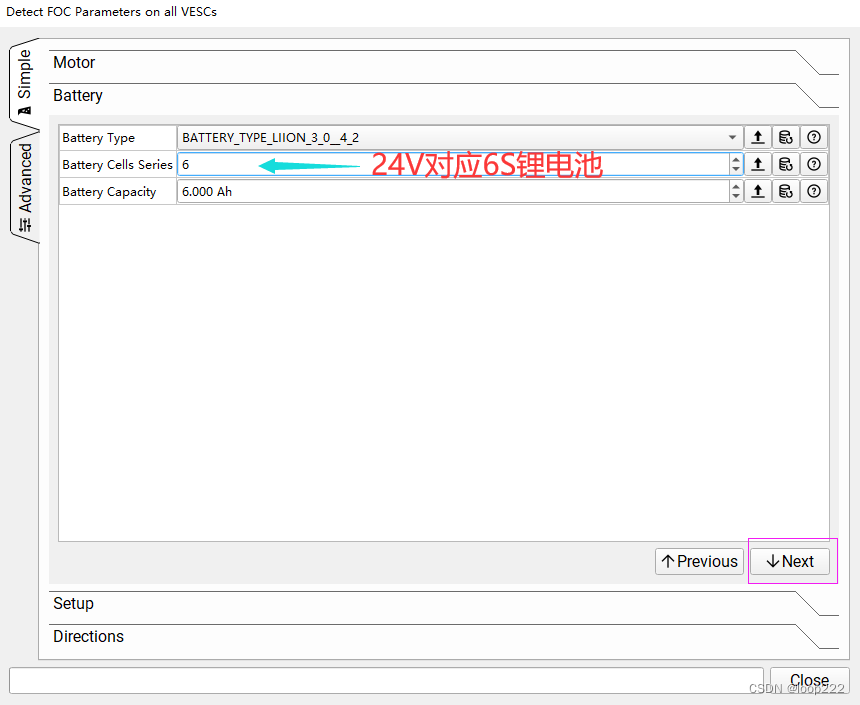
2、电源24V
二、VESC4驱动霍尔电机
2.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | VESC4 | 1 |
| 2 | 直流无刷电机 | 1 |
| 3 | 24V电源 | 1 |
| 4 | USB延长线 | 1 |
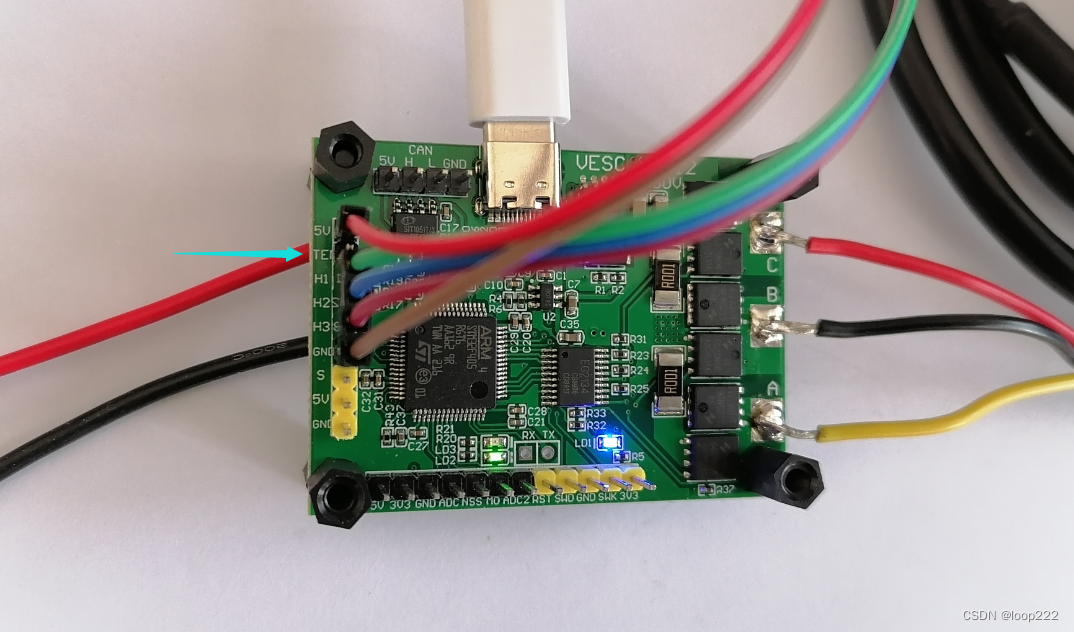
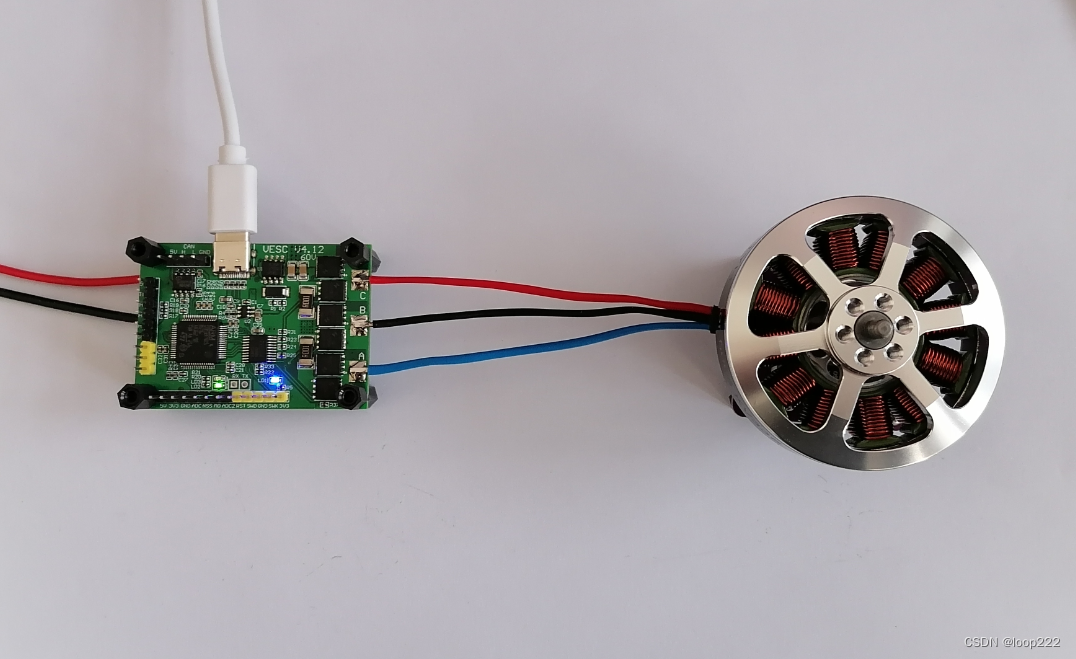
2.2、硬件连接
电机三相线随便接,hall信号三根线随便接,

VESC 购买链接:https://item.taobao.com/item.htm?ft=t&id=684760394070,图锐科技
有些电机内部预埋有热敏电阻,用于检测电机温度,如果电机没有温度检测,排针悬空即可。如下图:
2.3、打开软件
使用vesc_tool_3.00。
最新版本的上位机软件不好用,校准都通不过,对比多个版本后这个版本最好用,与固件版本最匹配。

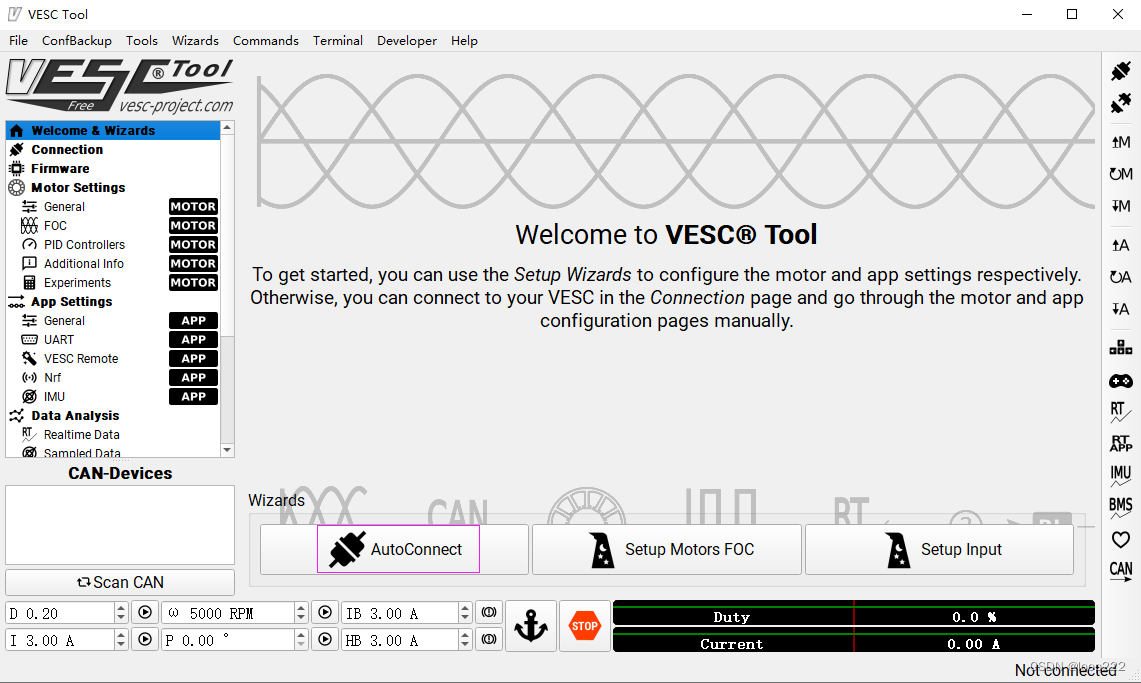
2.4、连接
软件右下角提示未连接,点击“AutoConnect”。如下图:
VESC通过USB接电脑,会被电脑识别为USB转串口。
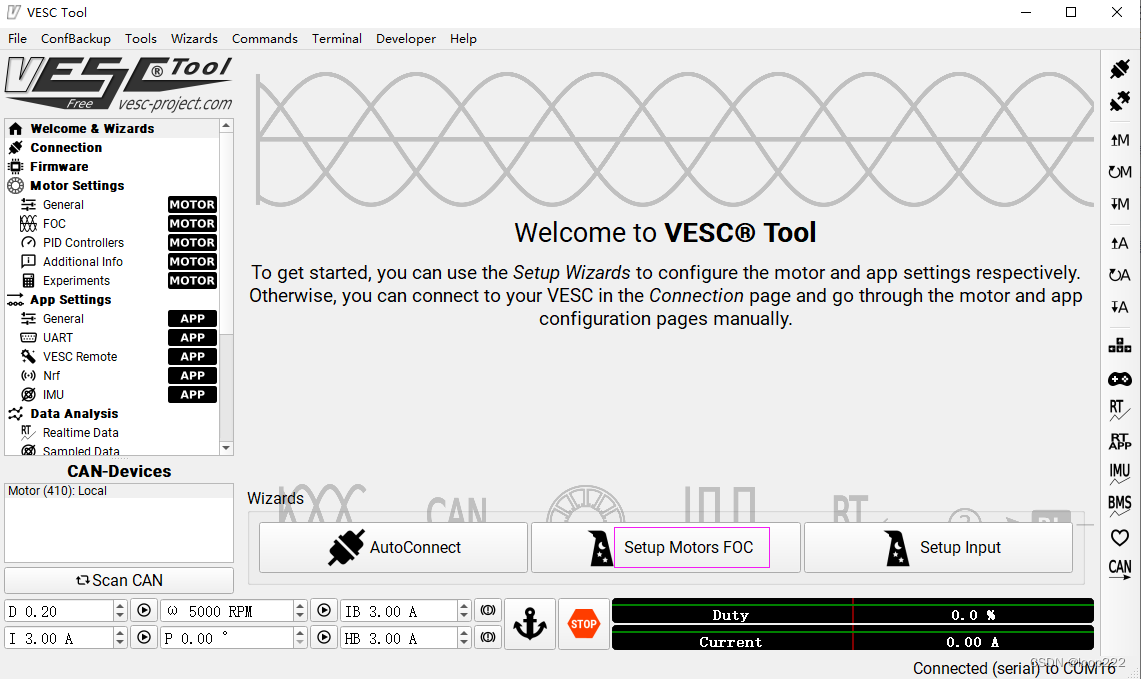
2.5、校准电机
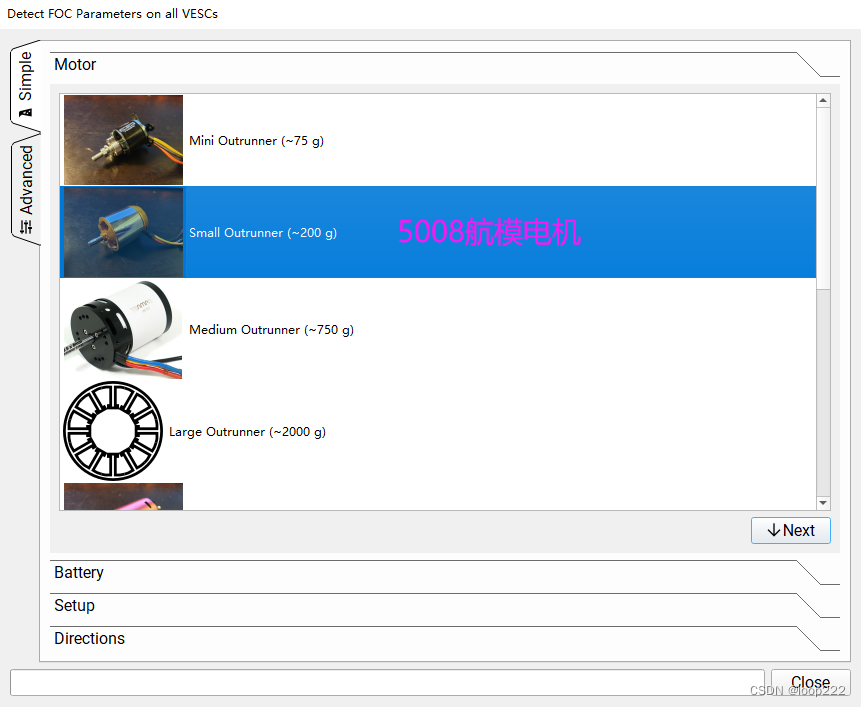
串口连接成功后,点击“Setup Motors FOC”,如下图:
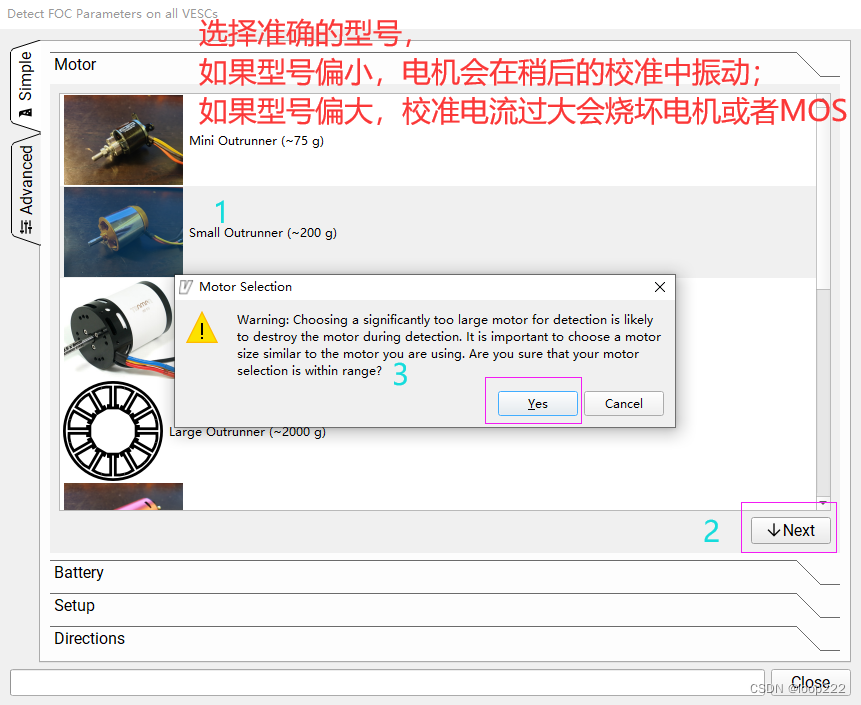
选择电机型号,这一步类似于simpleFOC代码中的 voltage_limit 参数的设置,或者类似ODrive中的 odrv0.axis0.motor.config.calibration_current 参数的设置。
归根结底就是设置校准时PWM的占空比,因为校准时为开环控制,所以这个参数非常重要。
内转子霍尔电机功率一般不大,看起来挺大的个头功率只有几十瓦,选择small 就可以,如下图:
弹出的警告就是告诉你要非常小心。
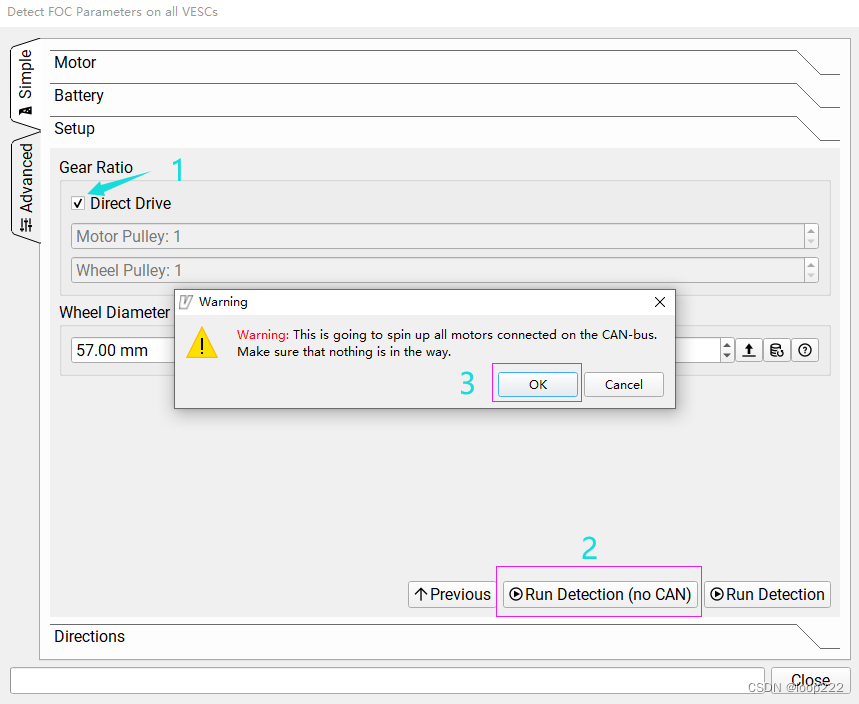
打勾表示电机没有安装减速机。
下面的两个“Run Detection”似乎点击哪个都可以,有没有CAN线不影响检测结果。
点击“OK”开始检测,如下图:
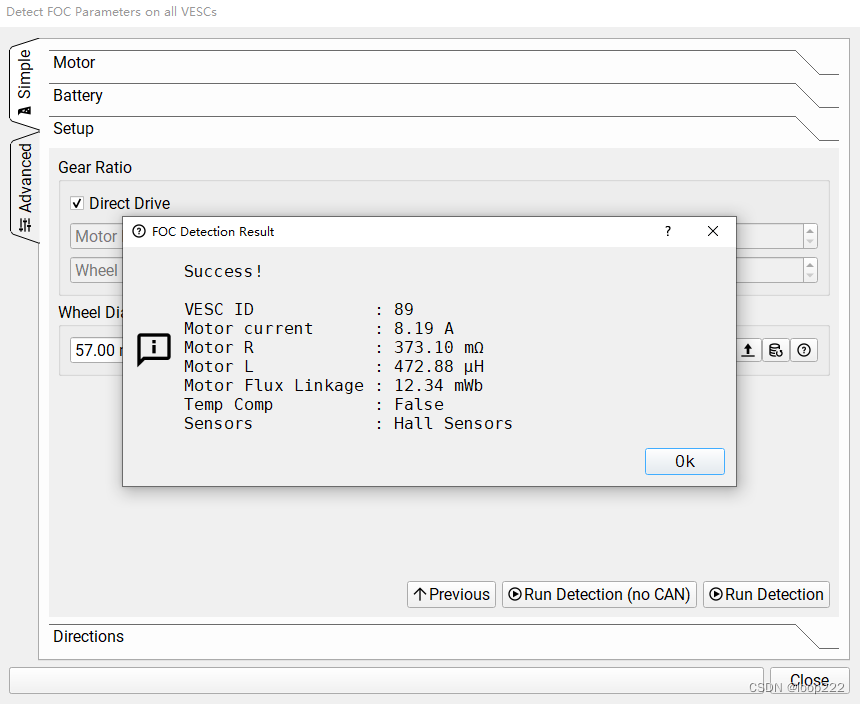
接上图点击“OK”后,电机不会立刻反应,大概5秒钟后才开始有动静,整个检测过程大概持续三四十秒。
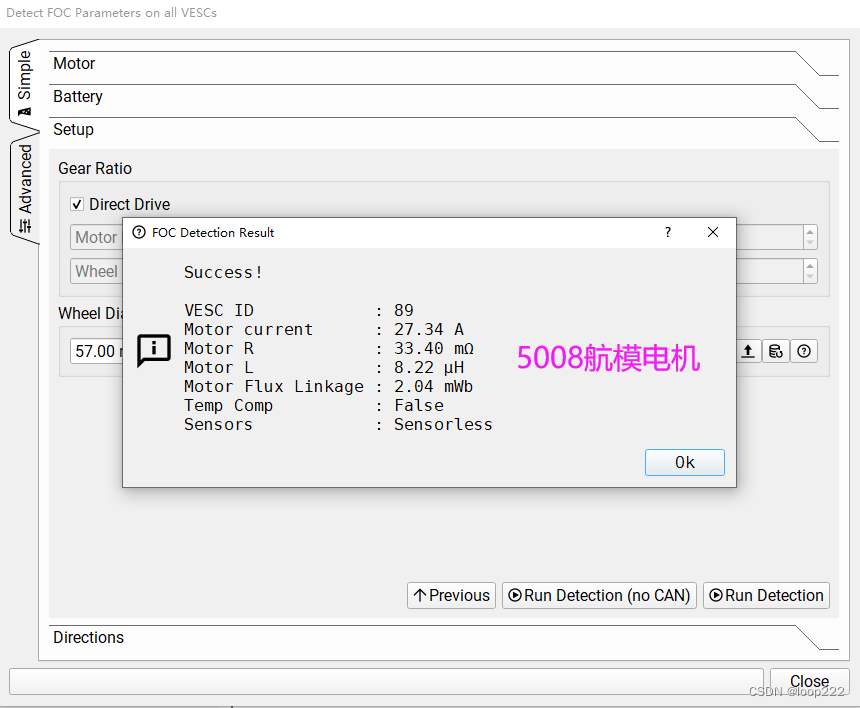
检测后弹出检测结果,如下图:
接上图点击“OK”后,大概5秒钟,出现如下图的测试界面:
“Fwd”表示电机正传,“Rev”表示电机反转,“Inverted”打勾表示电机正反转切换。
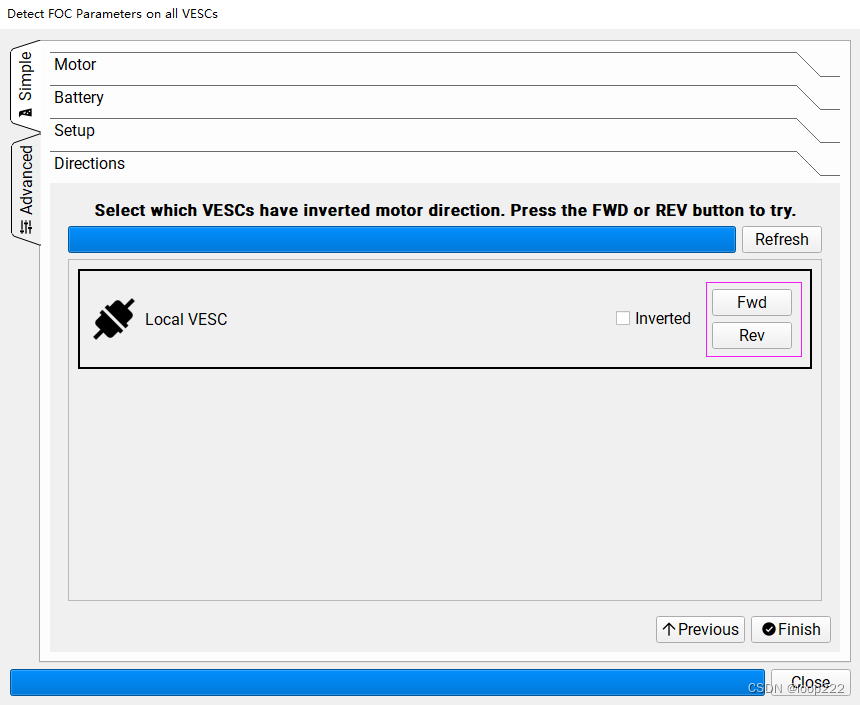
测试完毕后点击“Finish”,回到主界面。或者直接关闭软件。
此时电机校准完毕,参数已经保存到VESC中。
2.6、主界面操作
关闭后重新打开软件,VESC断电再上电,如下图:
软件右下角显示“Not connected”,点击“连接”,连接后软件会先读出VESC保存的参数,在右侧的Motor Settings
里 可以看到电机的各种参数,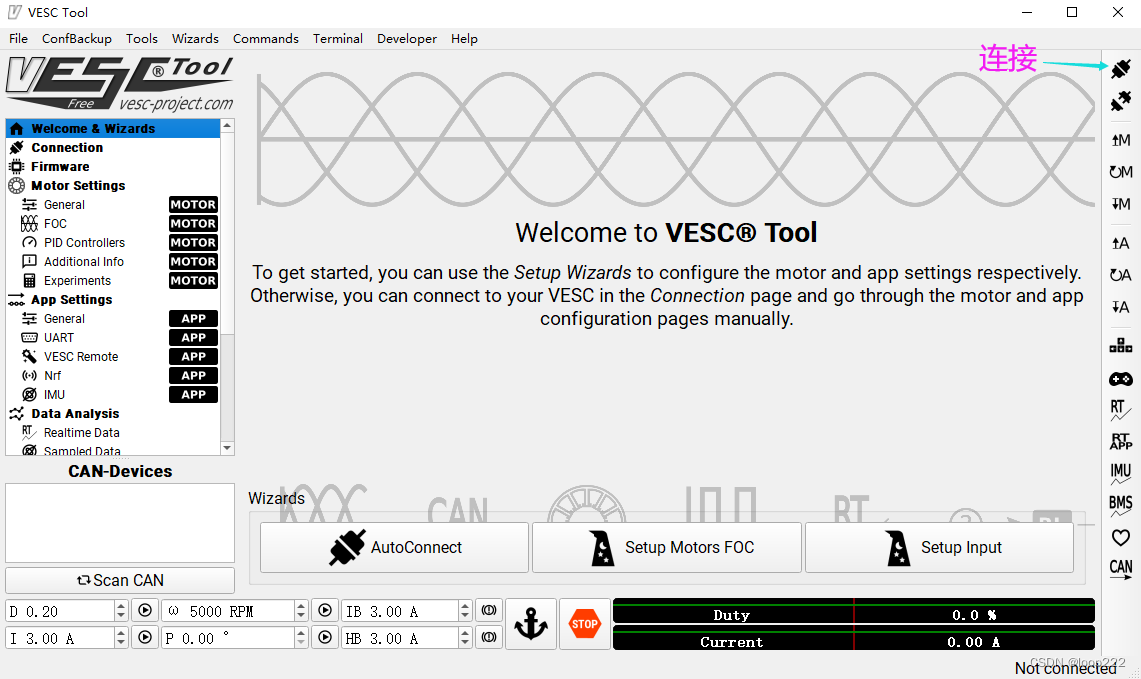
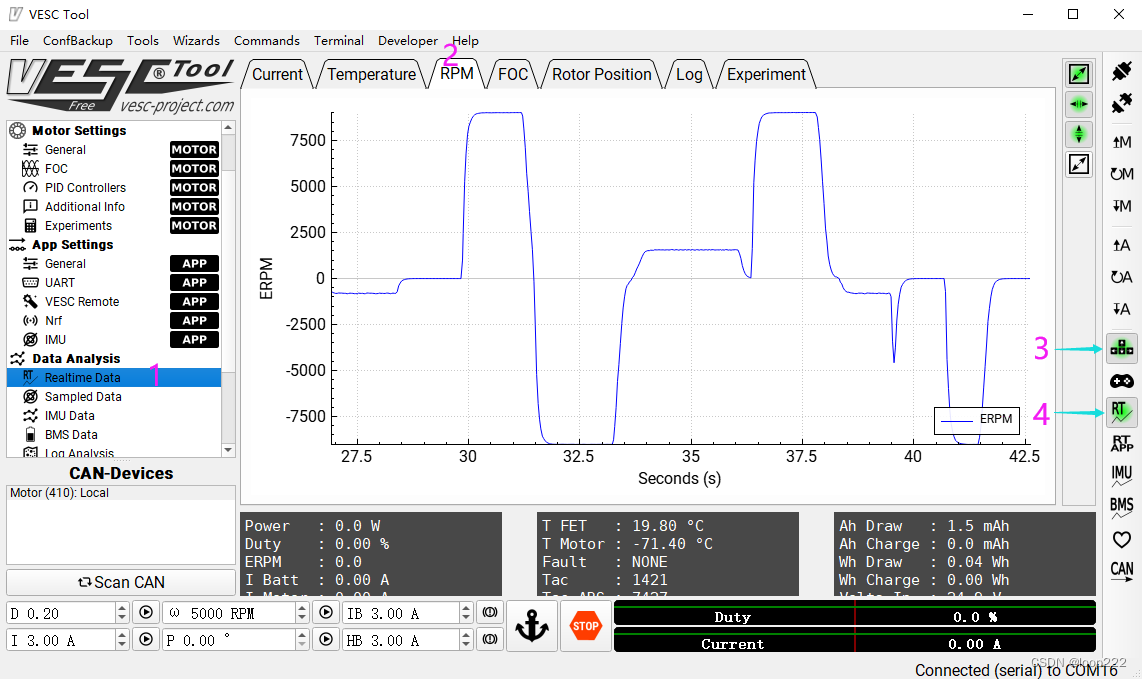
查看电机的实时数据,
下图第3步 打开 上下左右键控制电机转动 的功能,其中左右键控制电机低速正反转,上下键控制电机高速正反转。
注意,显示的转速是“ERPM”,也就是电角度的转速,应该是 机械转速x极对数。
三、VESC4驱动无感电机
3.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | VESC4 | 1 |
| 2 | 5008航模电机 | 1 |
| 3 | 24V电源 | 1 |
| 4 | USB延长线 | 1 |
3.2、硬件连接
VESC 购买链接:https://item.taobao.com/item.htm?ft=t&id=684760394070,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
3.3、打开软件
使用vesc_tool_3.00
3.4、校准电机
只描述校准过程,每一步的详细说明请参考上面 霍尔电机的校准。
AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA
接上图点击“OK”后,电机不会立刻反应,大概5秒钟后才开始有动静,整个检测过程大概持续三十秒。
检测后弹出检测结果,如下图:
接上图点击“OK”后,大概5秒钟,出现如下图的测试界面:
“Fwd”表示电机正传,“Rev”表示电机反转,“Inverted”打勾表示电机正反转切换。
实际测试会发现,电机可以零速起步,转动平稳;并且启动电流不大,说明没有使用开环模式。大概这就是高频注入,稍后对照代码研究下。
在主界面上的操作方法请看上面的 霍尔电机小节,不再赘述。
四、VESC4驱动AS5047P
- 上面的无感启动虽然可以零速起步,但是启动扭矩不大,而用编码器可以实现大扭矩启动,
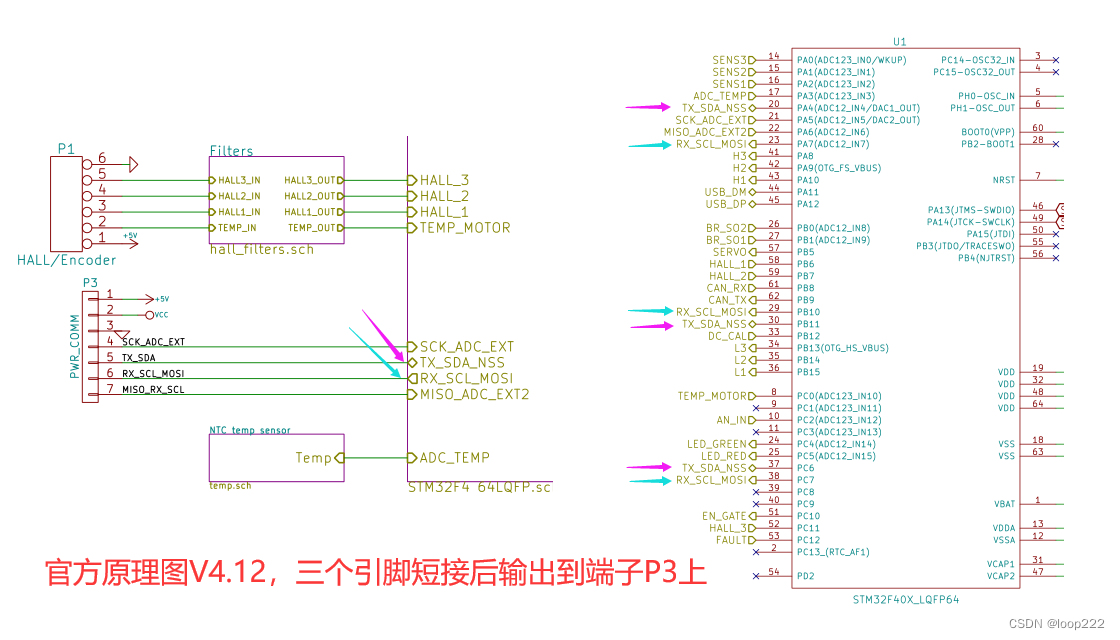
- 网上很少VESC驱动AS5047P的说明,还有说只能用HALL信号模拟SPI的,但板载接口中分明已经引出了SPI接口,
- 本人实际测试时,发现在校准阶段,直接用SPI接口确实不能检测到AS5047P编码器,但用示波器查看SPI波形,发现有信号输出,
- 官方硬件中把3个引脚短接在一起连接到端子上,大概是受制于板子尺寸,节约端子数量。这导致SPI信号被别的引脚干扰,无法识别编码器,
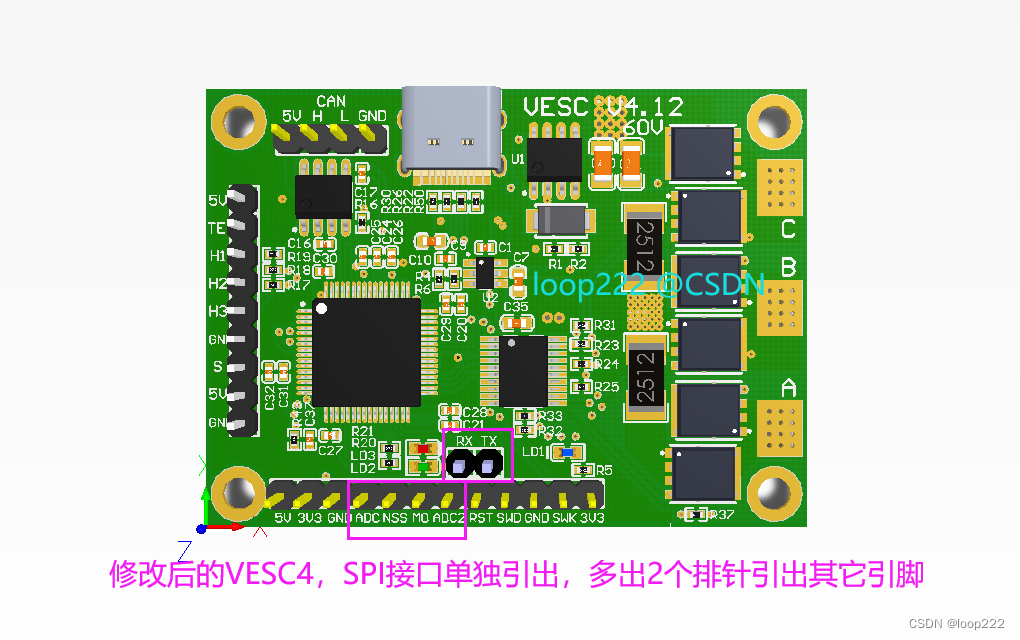
- 重新设计VESC4.12,把三个引脚分开引出,测试AS5047P成功。
4.1、软硬件修改
- 硬件修改,把短接的三个引脚分开后引出到端子上
- 固件中,需要先使能 AS5047_USE_HW_SPI_PINS,在conf_genaral.h 文件第41行,编译后重新烧写,

4.2、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | VESC4 | 1 |
| 2 | 5008航模电机 | 1 |
| 3 | 24V电源 | 1 |
| 4 | USB延长线 | 1 |
4.3、硬件连接
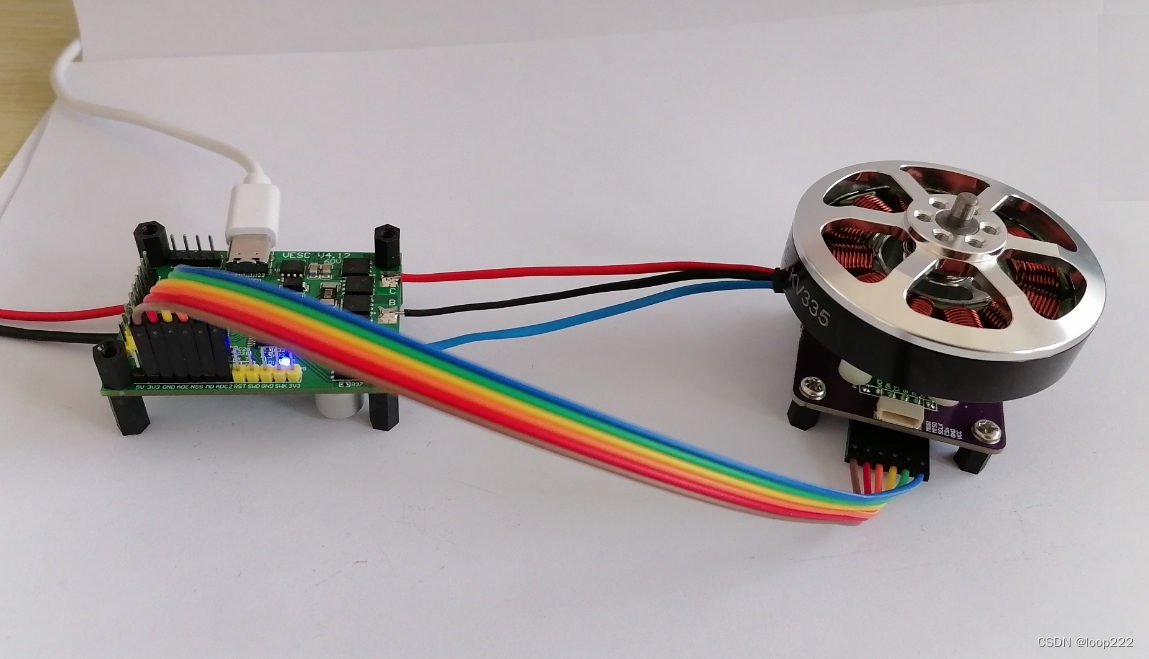


VESC 购买链接:https://item.taobao.com/item.htm?ft=t&id=684760394070,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
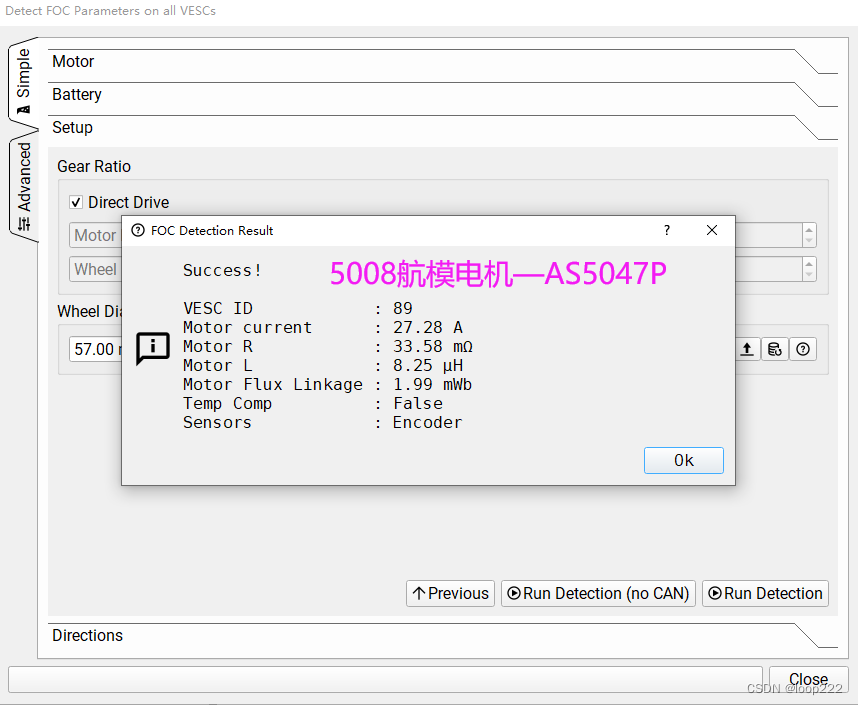
4.4、校准电机
校准过程与前面的相同,请参考 3.4 小节,
因为多了AS5047P编码器,所以校准的时间会比上面的多十几秒,
校准的结果入下图:
五、VESC4驱动MT6816和ABZ
5.1、MT6816

代码中有使能MT6816编码器的配置,所以专门做了一个MT6816的编码器用来验证,

验证的结果是始终不能识别,翻看代码发现有点混乱,似乎使用了SPI3来跟芯片通信。下载了最新版本的固件 V6.02,发现头文件中已经删除了这个编码器的使能配置。最终的结论就是这个编码器不能用,请大家避坑。
5.2、ABZ

代码中有模有样的定义了ABZ信号,反复测试不能识别,估计也不支持。大家就不用再浪费时间了。
欢迎加入技术交流群:923734429 (入群申请写:CSDN)
(完)

















 5020
5020

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









