







 LTA-OM是一种高效的激光雷达SLAM系统,集成了FAST-LIO2和稳定三角形描述符,支持实时长期关联地图构建和多会话定位与地图构建。系统在多种环境中展现出优异性能。
LTA-OM是一种高效的激光雷达SLAM系统,集成了FAST-LIO2和稳定三角形描述符,支持实时长期关联地图构建和多会话定位与地图构建。系统在多种环境中展现出优异性能。
0. 简介
同时定位与地图构建(SLAM)技术广泛应用于地面机器人、无人机和自动驾驶汽车。本文介绍了一种高效、稳健和准确的激光雷达SLAM系统LTA-OM。该系统采用FAST-LIO2和稳定三角形描述符作为激光雷达-惯性测量单元(IMU)里程计和环路检测方法。LTA-OM实现了功能完备,包括环路检测和修正、误报环路闭合拒绝、长期关联地图和多会话定位与地图构建。本文的一个创新之处是实时长期关联(LTA)地图构建,它利用FAST-LIO2的直接扫描到地图的配准,并利用修正后的历史地图在全局上约束地图构建过程。LTA可以实现更加全局一致的地图构建和无漂移的里程计在重访地点。我们对LTA-OM和其他最先进的激光雷达系统进行了全面的基准测试,使用了18个数据序列。结果表明,LTA-OM在轨迹准确性、地图一致性和时间消耗方面稳定优于其他系统。LTA-OM的稳健性在一个具有相似结构的多层建筑的复杂场景中得到了验证。此外,设计了多会话模式,允许用户存储当前会话的结果,包括修正后的地图点、优化的里程计和描述符数据库,以供将来的会话使用。这种模式的好处是进一步提高准确性和一致的地图拼接,有助于终身地图构建。此外,LTA-OM具有对机器人控制和路径规划有价值的特性,包括高频率和实时的里程计、在重访地点无漂移的里程计和快速环路闭合收敛。此外,LTA-OM具有通用性,适用于多线旋转和固态激光雷达、移动机器人和手持平台。
1. 主要贡献
总结一下,本报告的主要贡献包括:
- LTA-OM:一种高效、稳健和准确的SLAM系统。我们将FAST-LIO2、STD-LCD和循环优化集成到系统中。通过广泛的基准实验,包括城市、校园和非人工环境,以及相同或相反方向、小重叠重访和不同时间持续性(8∼112分钟)或行驶距离(1.1∼7.5公里),证明了LTA-OM的效率和准确性优于最先进的激光雷达系统。我们还将我们的系统与一个结构相似的场景进行了测试——一个具有不同层次的类似走廊的多层建筑,我们的系统仍然可以正常运行并构建出一个良好的地图。
- 实时长期关联。我们的工作利用历史地图点在重访地点对LIO的在线定位和建图进行全局约束。当循环优化完成后,我们使用循环优化结果来校正FAST-LIO2的姿态状态,并动态从历史地图中重新加载地图点到实时地图中进行在线LIO。通过这种方式,LIO的地图构建变得全局一致,由于使用了校正后的历史地图,LIO的定位变得无漂移。此外,姿态校正和实时地图更新的机制经过精心设计,以实现实时性能并避免长时间的LIO延迟。
- 多会话模式。我们的SLAM系统中的长期关联自然地扩展到多会话模式,用户可以将LTA-OM的地图存储在上一个会话中,并在当前会话中加载它进行重定位。具体而言,在这种模式下,系统首先使用LTA-OM的循环检测模块在预存储的地图中重新定位。然后,LTA-OM的LIO模块动态加载预存储的地图到当前会话中构建的实时地图,以约束在线定位和建图。结果,预存储的地图和实时地图自然地拼接在一起,LIO的姿态在预存储的地图上变得无漂移。当机器人进入预存储地图中未探索的区域时,LTA-OM会将新的点追加到拼接地图中,从而自动扩展地图而无需进一步合并。
2. 主要框架
我们系统的流程如图2所示。我们的系统由四个核心模块组成:LiDAR-IMU里程计(LIO)、回环检测、回环优化和回环校正。
流程工作流程简要说明如下。LIO模块是FAST-LIO2的一种变体,它包含了长期关联,提供了注册的扫描和估计的里程计给回环检测模块。回环检测模块STD-LCD提取关键点并检测回环闭合以供回环优化后端使用。然后,回环优化利用提供的里程计、关键点和回环闭合信息构建和维护一个位姿图,然后在检测到回环闭合时对位姿图进行优化。一旦成功完成回环优化,回环校正就利用优化后的里程计来校正位姿状态并替换LIO模块的地图(即ikd-Tree)
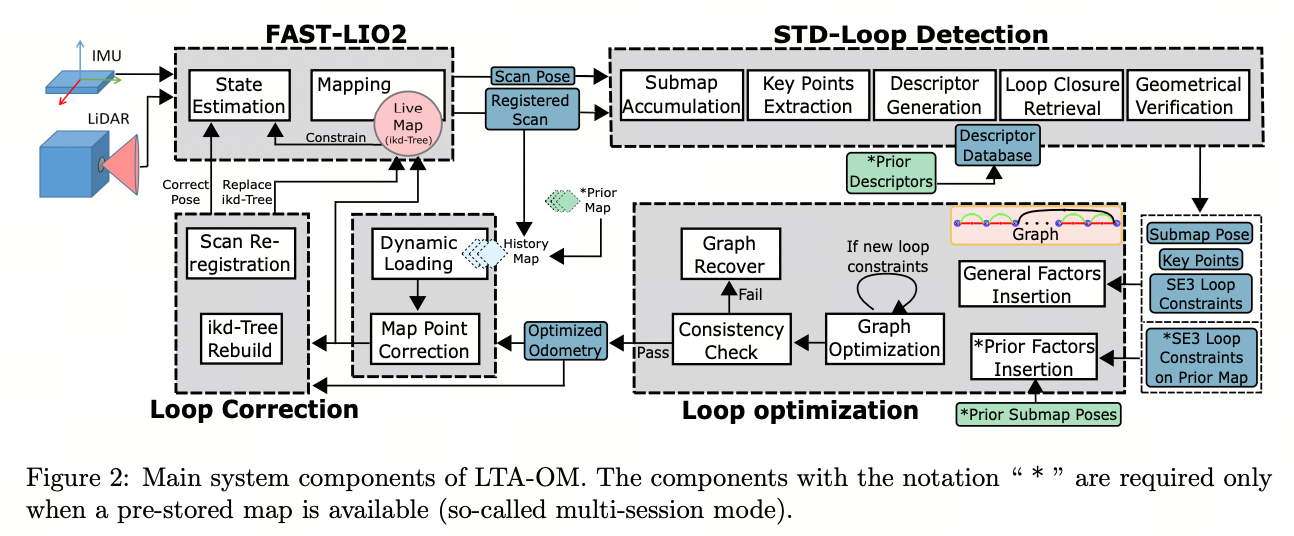
图2:LTA-OM的主要系统组件。带有“*”标记的组件仅在存在预存地图时需要(即所谓的多会话模式)


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











