






GPS接收机描述的观测值包括伪码 与 相位,正常双频情况下会有5类观测值:L1 L2 P1 P2 CA。
其中,L1与L2为相位,P1,P2,CA都是伪码。
观测方程描述的是 观测值 与实际距离(导航卫星与接收机)的关系
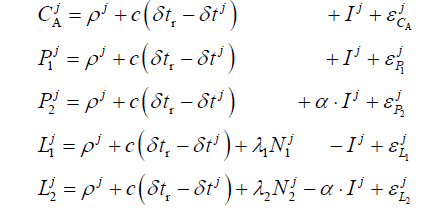
其中,j代表GPS卫星序号,ρ代表实际距离,t代表导航卫星钟差,tr为接收机钟差,I代表电离延迟,N代表整周模糊度,λ代表波长,ξ代表测量误差。
一般来讲,导航卫星钟差为已知,IGS会发布精密钟差文件,但是BD没有,没有的话也可以拟合,拟合的过程是用GPS求出接收机钟差,然后得到BD导航卫星的钟差。GPS钟差一般1E-3 或者1E-4量级。
电离层通过双频消电离层组合消除影响。
测量误差包括 多径,pco,pcv,相位噪声,至于接收机以及导航卫星的电路延迟一般不会考虑,直接拟合在噪声里面了。
几何学定位的观测方程就基于以上,动力学就更多一点动力学部分。
定位算法主要包括最小二乘与卡尔曼滤波。

















 7930
7930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









