







目录
前言
最小二乘与卡尔曼滤波是目前GNSS定位中主流的二类平差滤波方法,而构建观测模型是此二类方法的关键步骤。本篇从伪距和载波相位观测方程出发,推导了伪距单点定位,RTK相对定位,历元间三差相对定位中的观测模型。主要参考RTKLIB、《GPS测量与数据处理》及《GPS原理与接收机设计》书籍。
一、观测方程
1、伪距、载波相位观测方程

其中,p为伪距观测值(单位m),r为真实卫地距(单位m),c为光速(单位m/s),光速乘的那部分为接收机钟差及卫星钟差(单位s),I为电离层延迟(单位m),T为对流层延迟(单位m),φ为载波相位观测值(单位rad),λ为载波波长(单位m),N为整周模糊度(单位rad)。伪距观测及载波相位观测中都在方程尾引入了测量噪声项,代表了所有未直接体现在方程中的误差总和,为了方便公式书写,后续将其忽略。
2、单差、双差、三差观测方程
单差观测:
伪距观测及载波相位观测在流动站与基准站之间求一次差,可以消除卫星钟差,在短基线情况下(基站流动站之间的距离不超过10km),可以消去电离层和对流层延迟误差,忽略测量噪声项,得到如下观测方程:

双差观测:
单差观测在同系统卫星p与卫星q之间作二次差,可消去接收机钟差,得到双差观测方程:

三差观测:
双差观测在此历元与上一历元之间作三次差,可消去双差整周模糊度参数(常量),得到三差观测方程:

二、观测模型
1、伪距单点定位(SPP)最小二乘观测模型
伪距观测方程中的r为真实的卫地距,由于真实接收机位置未知,真实卫地距是无法计算的,我们只能给定一个大致的接收机位置[x, y, z](ECEF_xyz坐标系下,后续默认都在此坐标系下),可求得卫星与接收机大致位置之间卫地距ρ:

真实卫地距r:

在真实位置处泰勒展开并取一阶项,可得:
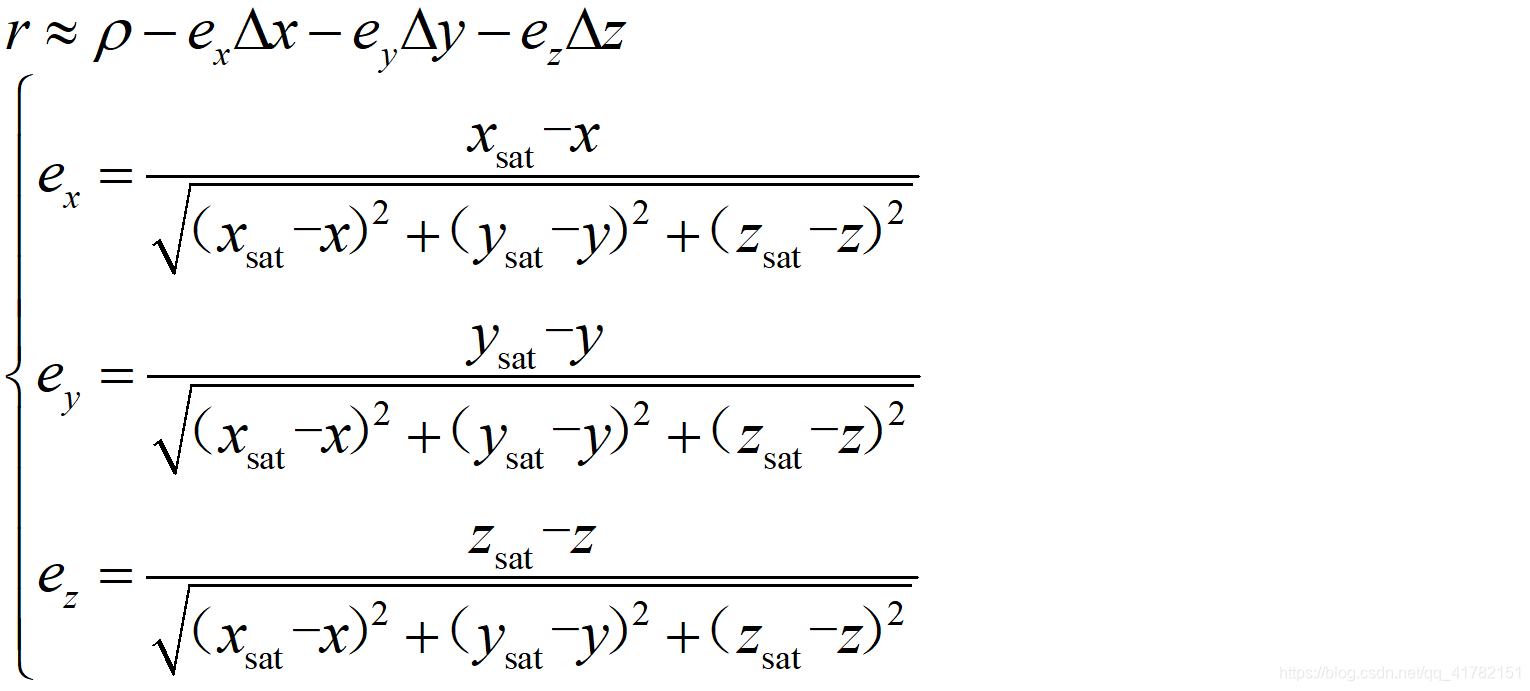
则伪距观测方程可写为:

通过上式我们可以构建最小二乘的几个矩阵:
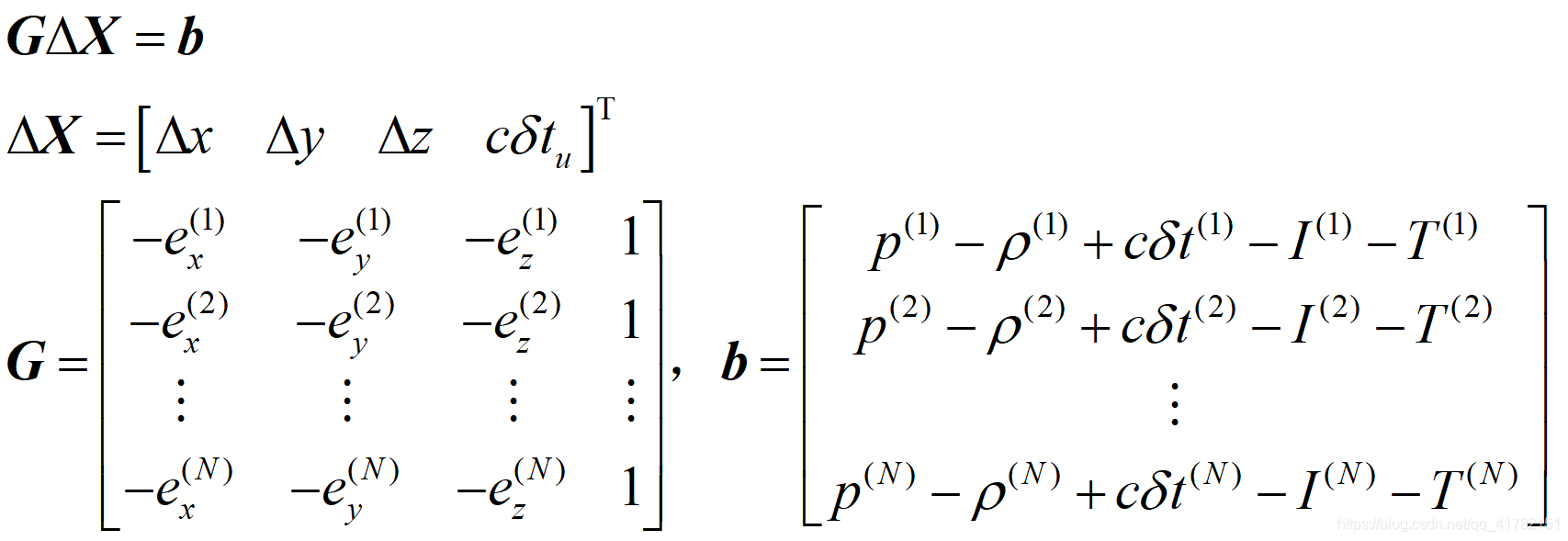
然后通过最小二乘求解公式完成一次位置的迭代更新:

上式中的P为伪距观测的权值矩阵,一般通过卫星高度角定权模型给出,迭代计算10次以下(RTKLIB)就可收敛得到伪距单点定位结果。
2、载波相位相对定位(RTK)卡尔曼滤波浮点解量测模型
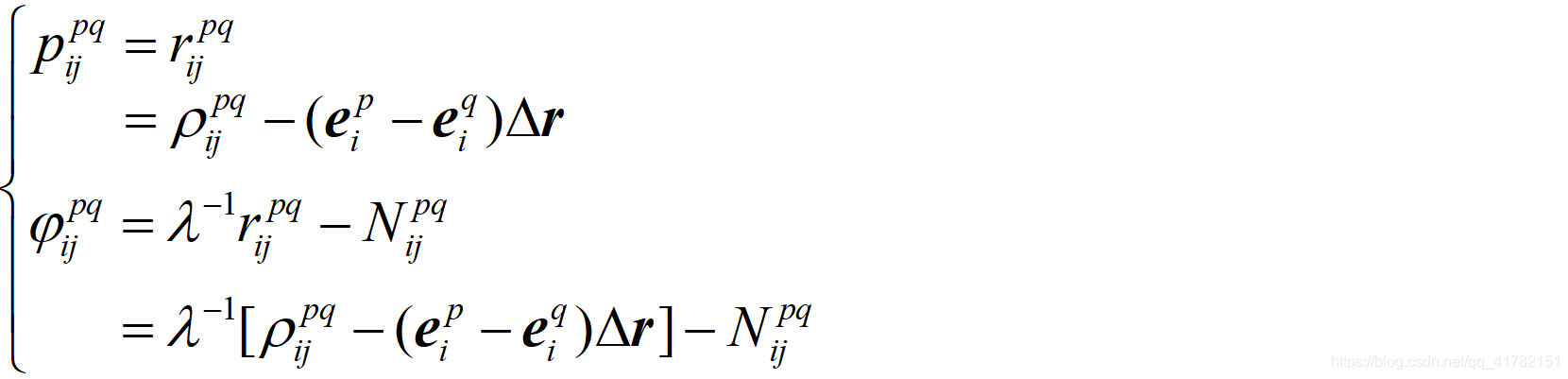
浮点解求解使用伪距及载波相位双差观测,双差观测方程:

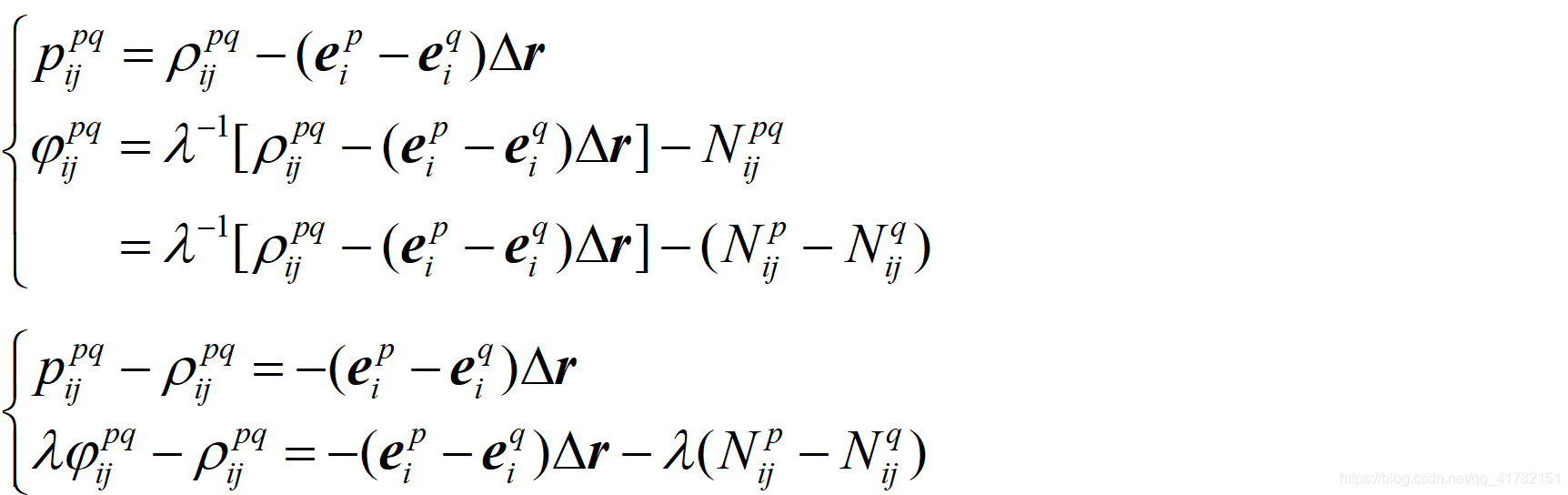
上式的r为真实双差卫地距,用下标i表示流动站,j表示基站(基站由于真实坐标已知,认为真实卫地距已知),上标p表示卫星p,q表示卫星q,代入真实卫地距线性化结果并站间作差星间作差可得:
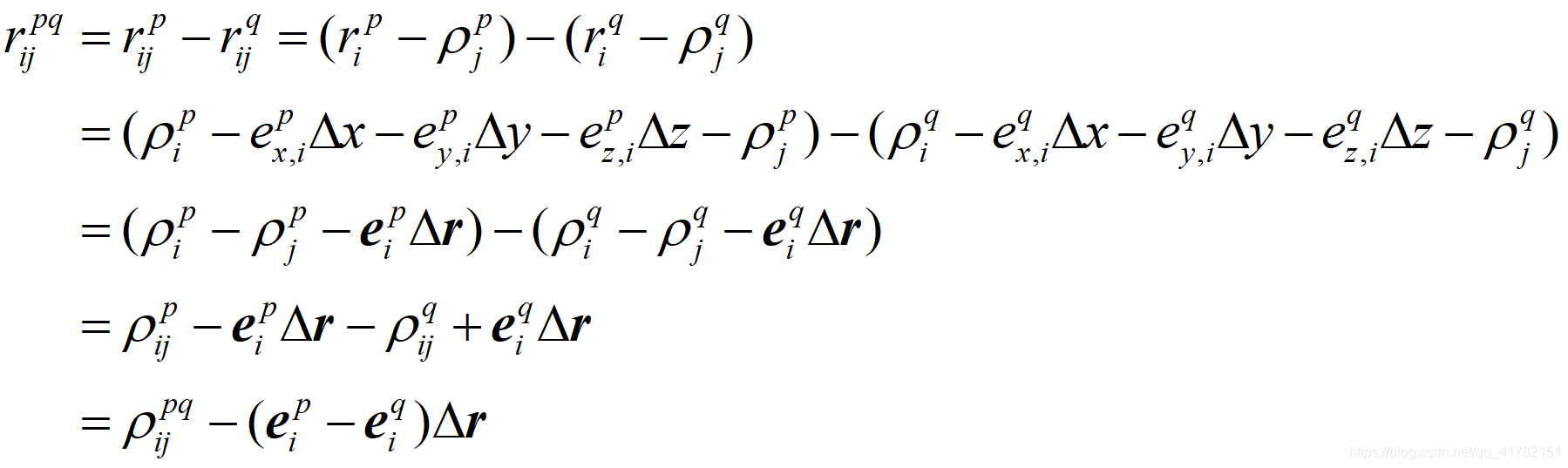
上式代入双差观测方程:
通过上式我们可以构造卡尔曼滤波量测模型,根据状态参数的不同,主要有以下两种构造方式:
(1)以单差模糊度参数作为状态量(RTKLIB)
根据状态量的不同对双差观测方程进行适当的变换:
根据上式,可以构建卡尔曼滤波浮点解求解的量测模型(假设观测到N颗卫星,以第一颗卫星作为双差基准星):

V(t)为双差观测量的误差,一般是通过伪距误差(事先设定的定值)及载波相位误差(事先设定的定值)通过双差变化得到。
(2)以双差模糊度误差作为状态量
将双差模糊度的误差(整数)分离出来,得到观测方程:
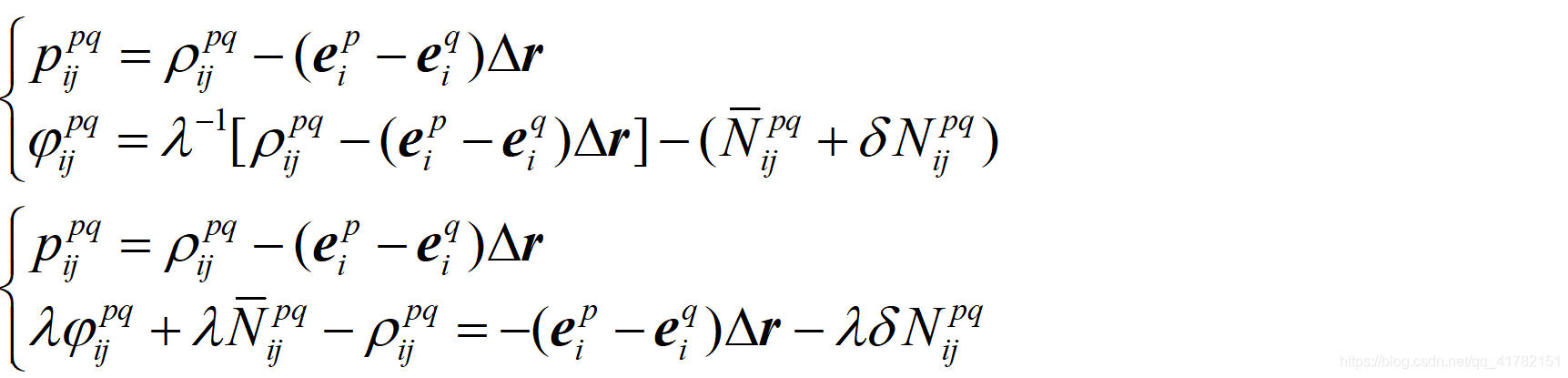
带-上标的N表示为上一历元双差模糊度的最优估计,根据上式,构建卡尔曼滤波浮点解求解的量测方程(假设观测到N颗卫星,以第一颗卫星作为双差基准星):
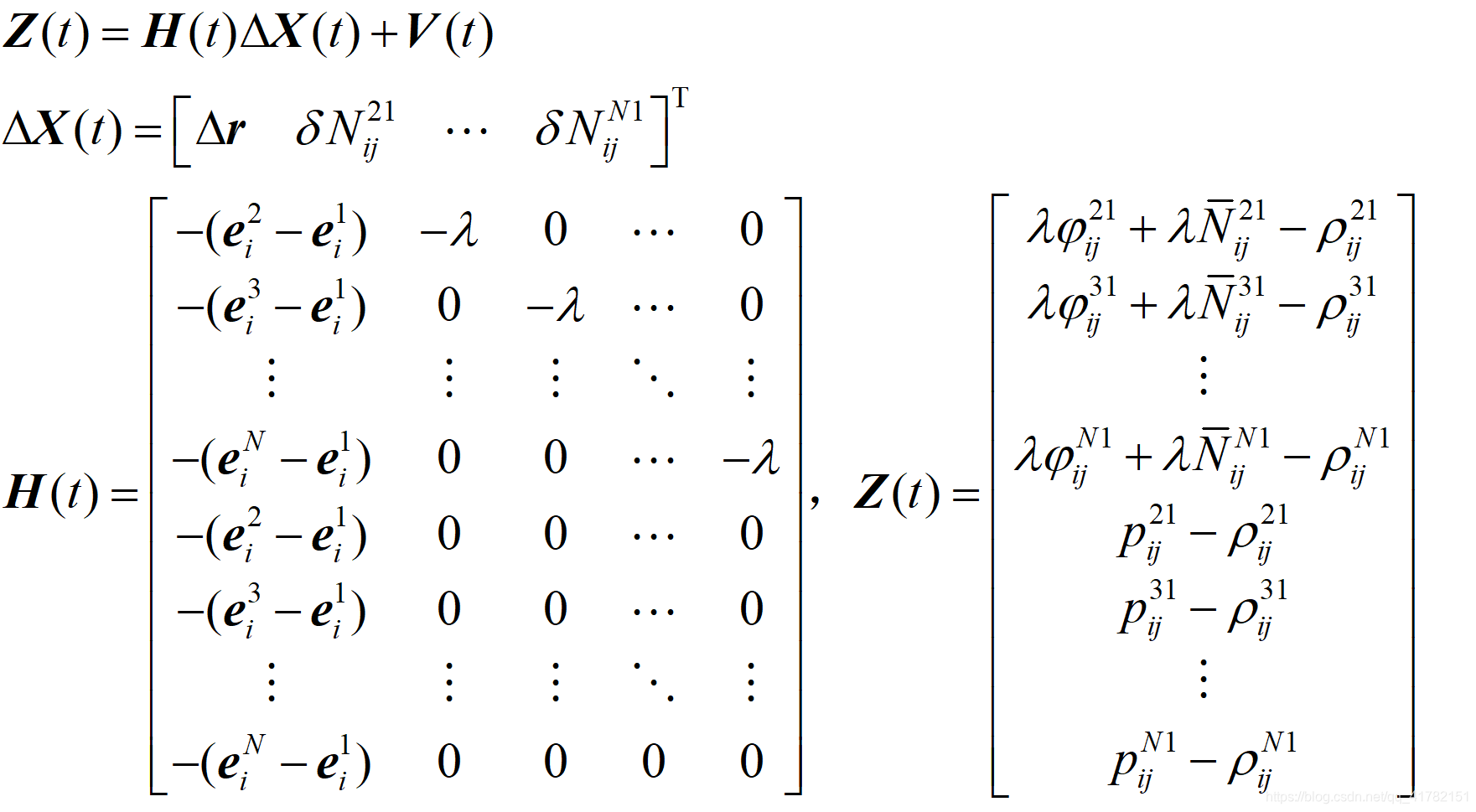
然后通过卡尔曼滤波量测更新公式完成卡尔曼滤波浮点解的求解。
3、 历元间三差最小二乘观测模型
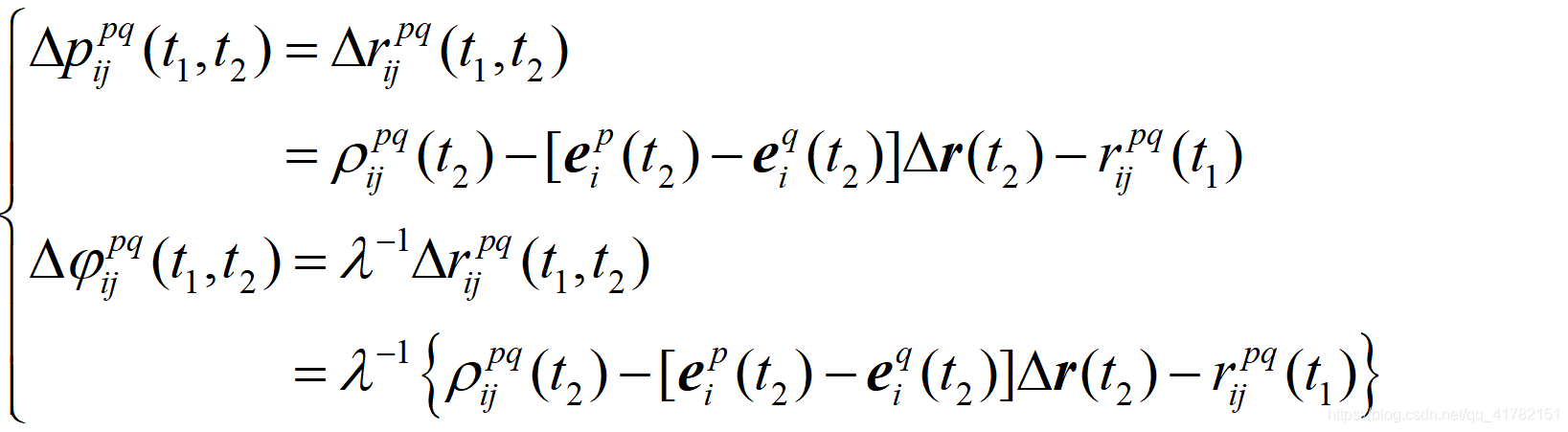
三差观测方程:

对于三差卫地距,在历元间作了一次差,我们认为上一历元的位置结果是精确的(即t1历元的双差卫地距是精确已知的),以t2历元的伪距单点定位位置解作为此历元接收机大致位置,代入t2历元双差卫地距的线性化结果,此时的真实三差卫地距写为:

上式中的delta_r(t2)表示t2历元的真实位置与t2历元大致位置间的误差。将上式代入三差观测方程,可得:
移项得:

通过上式我们可以构建出最小二乘的各项矩阵:
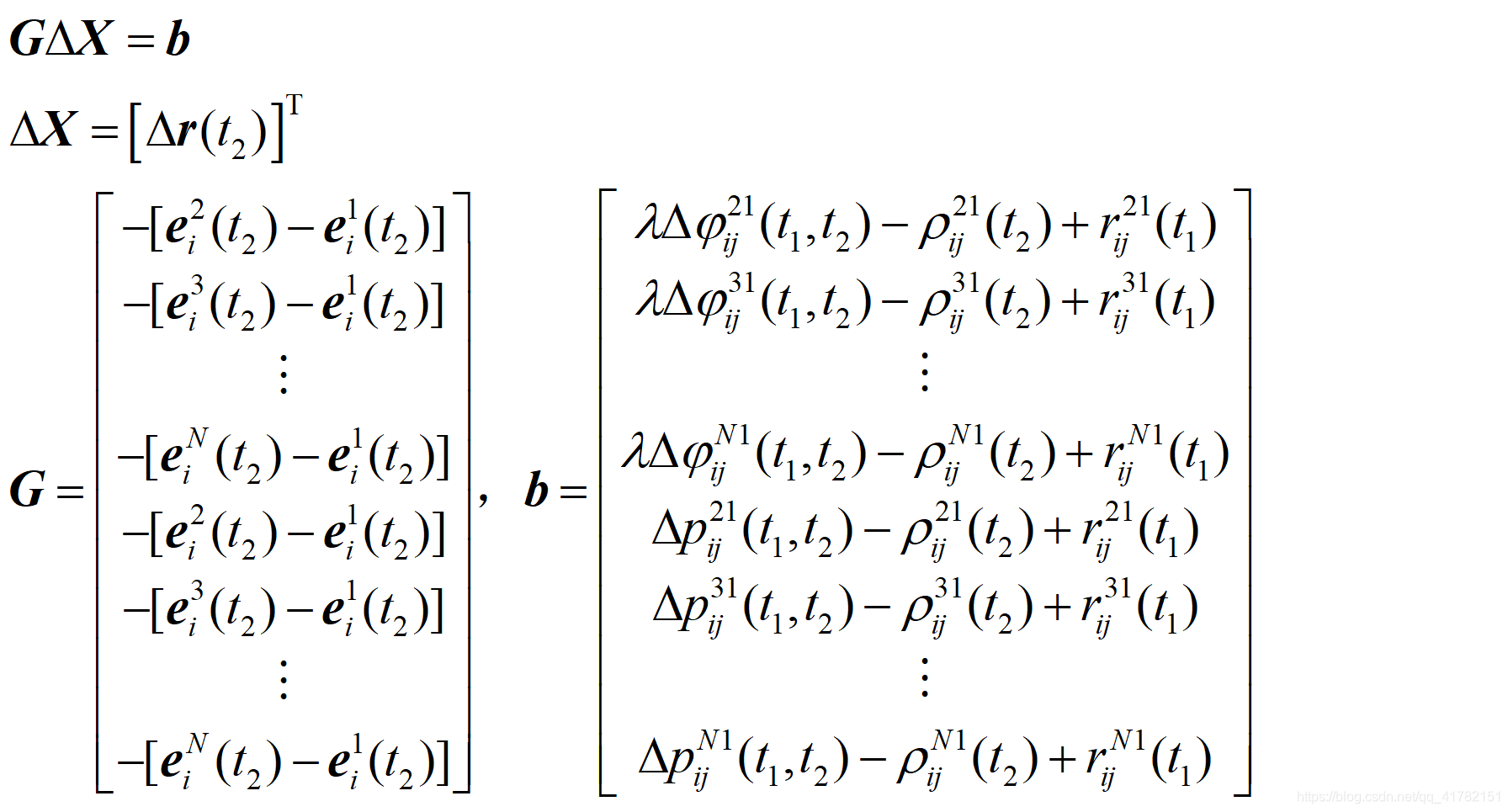
只做一次最小二乘迭代,得到此历元位置与此历元大致位置的位置误差,此位置误差再加上此历元大致位置与上一历元精确位置的误差,就得到了t1历元到t2历元的接收机位置变化量。若直接用上一历元的接收机精确位置作为此历元接收机的大致位置,那么三差求得的位置误差就是两历元间的接收机位置变化量。

















 2569
2569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









