






1. 简介
一直想要在大学玩一玩四旋翼,原本打算有时间了自己写一个飞控。后来知道了有PX4这个开源项目,是个非常好的学习项目,同时这个项目有一整套的系统(地面站、硬件等)。觉得自己没有必要从头开始搞,学习优秀的开源项目效率肯定会比自己做的要高,结果更好。同时一直没有做过一个比较大的项目(可能RM也算?),感觉自己之前学的一些东西都有点虚,不知道用来干什么。下半学期课程相对较少,正好用来学习一下优秀开源项目。
下面是PX4的github项目地址和开发者指南(本篇文章参考):
PX4/PX4-Autopilot的github项目地址
Developer Guide
本篇文章是在ubuntu18.04下配置环境,ubuntu也是开发者指南推荐的编译环境
2. 配置环境、下载工具链
下面的工具链适合大部分PX4固件版本,有些版本的固件只需要其中一部分。
下面是我的配置:
Gazebo, JMAVSim and NuttX (Pixhawk) Targets
- 在github仓库里有这三个工具的下载脚本,首先克隆项目
$ git clone https://github.com/PX4/PX4-Autopilot.git --recursive - 使用脚本下载,在命令后加入
--no-nuttx或--no-sim-tools选项可以忽视对应工具的下载。$ bash ./PX4-Autopilot/Tools/setup/ubuntu.sh - 设置cross-compiler 交叉编译链(GCC或者clang) ,我选择gcc(32位arm架构)。关于交叉编译可以参考一次搞定 Arm Linux 交叉编译。具体操作见下面的gcc(armhf)。
gcc(armhf)
ubuntu默认安装gcc-9-arm-linux-gnueabihf但是并不完全支持,我们需要下载gcc-8-arm-linux-gnueabihf。
$ sudo apt-get install -y gcc-8-arm-linux-gnueabihf g++-8-arm-linux-gnueabihf
并设置为默认工具链。
$ sudo update-alternatives --install /usr/bin/arm-linux-gnueabihf-gcc arm-linux-gnueabihf-gcc /usr/bin/arm-linux-gnueabihf-gcc-8 100 --slave /usr/bin/arm-linux-gnueabihf-g++ arm-linux-gnueabihf-g++ /usr/bin/arm-linux-gnueabihf-g++-8
$ sudo update-alternatives --config arm-linux-gnueabihf-gcc
我的电脑里并没有
gcc-9-arm-linux-gnueabihf工具链,所以运行第2条命令提示只有一个工具链
官网上还有 GCC (aarch64)工具链和Clang,其中 GCC (aarch64)针对 ARM64机器,因为我使用的pixhawk硬件是stm32芯片,所以使用gcc(armhf)。
ROS
- 获取ROS "Melodic"下载脚本
$ wget https://raw.githubusercontent.com/PX4/Devguide/master/build_scripts/ubuntu_sim_ros_melodic.sh - 启动脚本
$ bash ubuntu_sim_ros_melodic.sh
vscode
如果想使用IDE编译、调试代码,推荐vscode,参考VSCode
3. 编译代码
第一次编译,使用jmavsim仿真
使用仿真可以修改系统设置,在我们把代码下载到硬件上或者放到IDE之前。
进入github项目PX4-Autopilot文件夹,使用jmavsim仿真
$ make px4_sitl jmavsim
如果仿真正常,shell中会出现类似下面的信息:
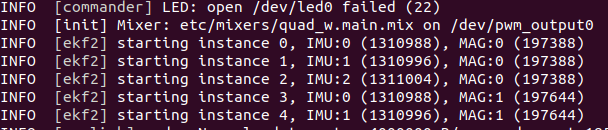
在shell中输入以下命令可以起飞、降落:
$ commander takeoff
$ commander land
也可以使用gazebo或其他仿真,只需要修改make后面的选项:
$ make px4_sitl gazebo
如果出现报错,不能正常启动仿真,可以先输入以下命令:
$ git submodule update --recursive
$ make distclean
编译基于 NuttX / Pixhawk 的固件
以编译Pixhawk 4硬件上运行的固件为例:
$ cd PX4-Autopilot
$ make px4_fmu-v4_default
通过usb下载固件
$ make px4_fmu-v4_default upload
成功会出现以下信息:
Erase : [====================] 100.0%
Program: [====================] 100.0%
Verify : [====================] 100.0%
Rebooting.
[100%] Built target upload
如果遇到问题首先参考Building PX4 Software里的
Troubleshooting















 1538
1538











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









