






在使用arduino舵机的时候一定要考虑电流峰值,不如容易造成arduino的重启。
#include <Servo.h> //定义头文件,这里有一点要注意,可以直接在Arduino 软件菜单栏单击Sketch>Importlibrary>Servo,调用Servo 函数,也可以直接输入#include <Servo.h>,但是在输入时要注意在#include 与<Servo.h>之间要有空格,否则编译时会报错。
Servo myservo; //定义舵机变量名
void setup() {
myservo.attach(9); //定义舵机接口(9、10 都可以,缺点只能控制2 个)
}
void loop() {
myservo.write(20); //设置舵机旋转的角度
delay(300);
myservo.write(160); //设置舵机旋转的角度
delay(300);
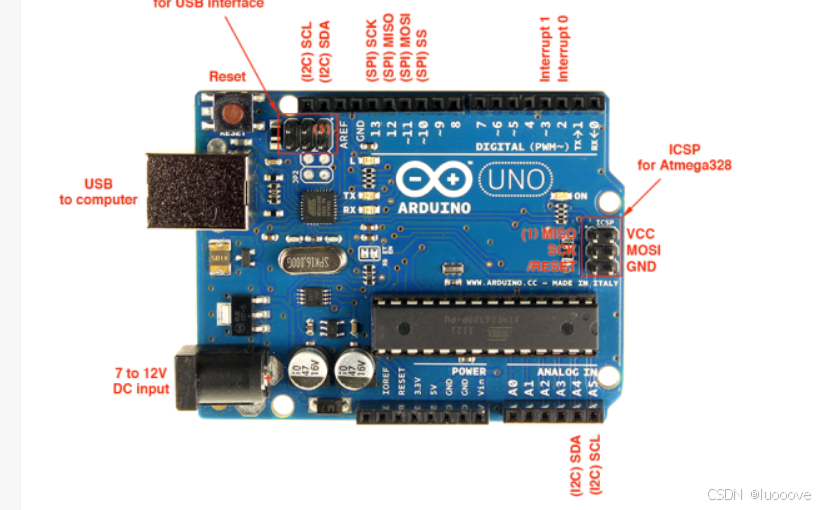
}使用一个UNO和9g舵机进行测试。
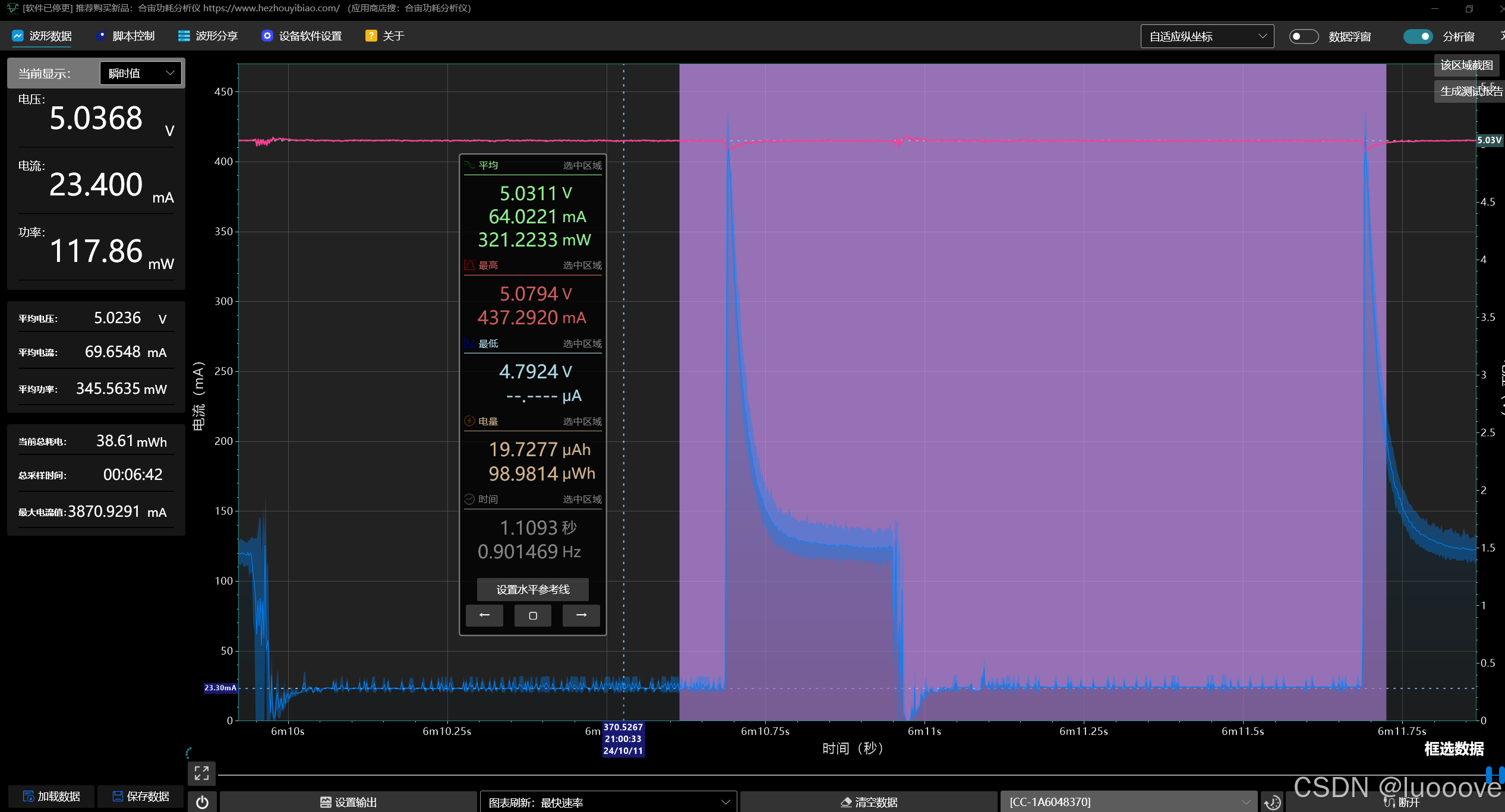
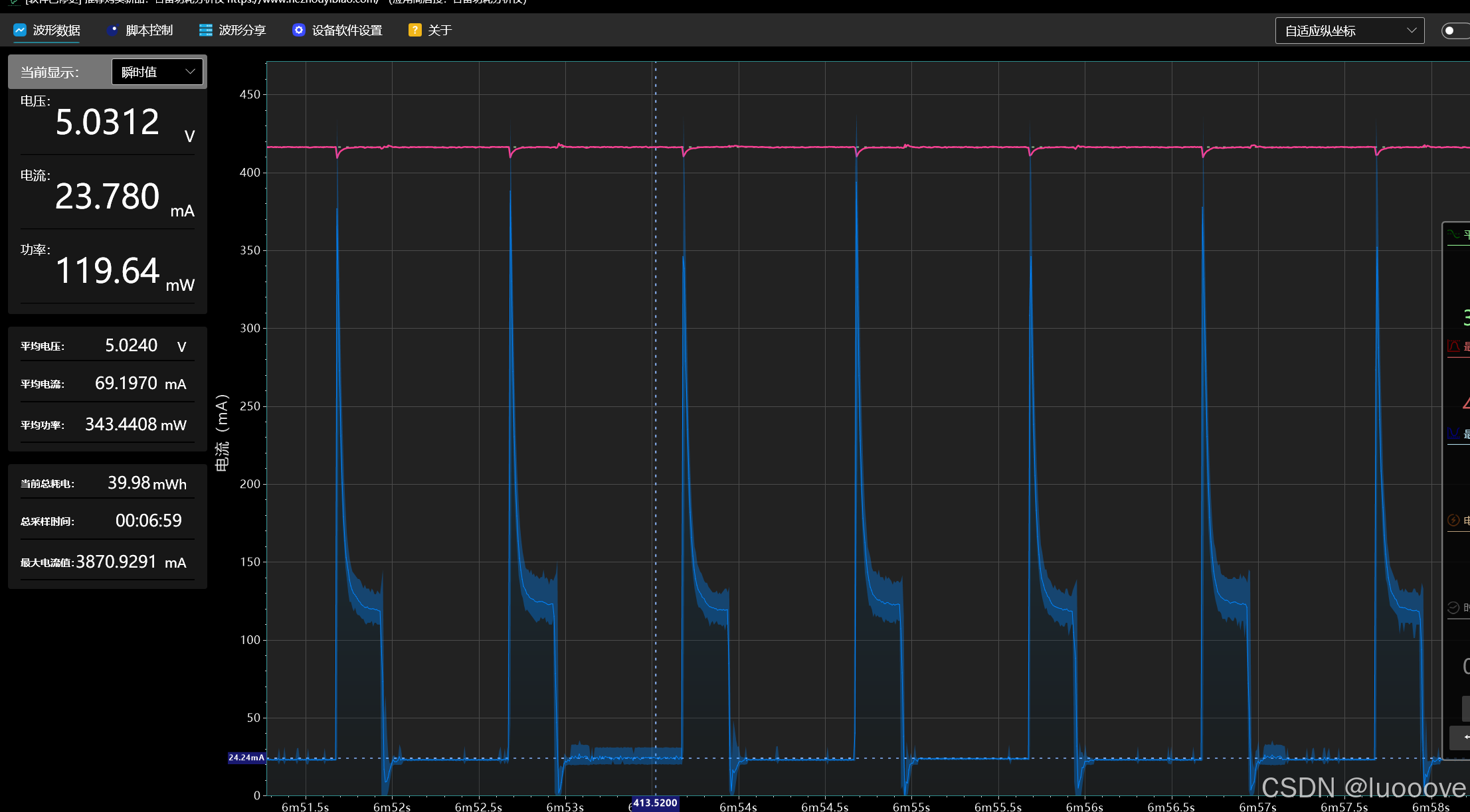
峰值电流会接近500mA,一般arduino使用的LDO是1117,

一般1117就800mA,大部分也不超过1A,如果接2个舵机很容易造成重启。

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









