







引言
自动驾驶技术正经历一场架构革命。传统上,自动驾驶系统采用模块化设计,将感知、预测和规划分离为独立组件。而上海人工智能实验室的OpenDriveLab团队提出的UniAD(Unified Autonomous Driving)则尝试将这些任务整合到一个统一框架中。本文将从多角度审视UniAD,既探讨其创新点,也分析落地应用面临的实际挑战。
1.理解"端到端"的真正含义
在自动驾驶语境中,"端到端"常指系统能直接从传感器输入到驾驶控制输出建立映射。UniAD在这方面采取了折中方案:
- 传统模块化方法:各模块严格分离,独立优化,可能导致信息丢失和错误累积
- 纯端到端方法:直接从传感器数据映射到控制命令,缺乏可解释性和安全保障
- UniAD方法:保留模块化结构,但通过统一特征表示和共同训练促进模块间协作
值得注意的是,UniAD并非完全意义上的端到端系统。它仍然保留明确的中间表示和模块划分,更准确地说是一种"统一模块化"设计。这种设计既追求端到端优化的性能提升,又保留模块化的可解释性。
2. UniAD根本目的
UniAD(Unified Autonomous Driving)是一个端到端自动驾驶框架,旨在通过统一架构解决传统模块化系统存在的信息割裂和错误累积问题。其核心用途是:
将感知(检测、追踪、地图构建)、预测(轨迹、占用)和规划(路径生成)三大任务整合到单一网络中,通过协同优化提升自动驾驶系统的整体性能。
3. UniAD具体功能实现
UniAD通过以下具体功能支撑自动驾驶决策:
-
动态环境建模
实时检测并追踪车辆、行人等动态物体(TrackFormer),同时构建在线高精地图(MapFormer),在无预存地图时仍能理解道路结构。
例:城市施工路段临时改道时,仍能识别锥桶围栏和新车道线。 -
多智能体交互预测
预测周围车辆/行人未来5-8秒的多模态轨迹(MotionFormer),并生成未来场景的3D占用网格(OccFormer)。
例:预判前方车辆可能急刹或变道,提前规划避让路径。 -
安全路径规划
综合所有信息,生成符合车辆动力学、避开占用区域且遵守交规的驾驶路径(Planner)。
例:在十字路口同时考虑对向左转车辆、闯红灯电动车和斑马线行人,计算最优通行时机。
4. 典型应用场景
UniAD特别擅长处理传统系统易失效的复杂场景:
| 场景类型 | UniAD解决方案 | 传统系统痛点 |
|---|---|---|
| 密集车流变道 | 通过MotionFormer预测周围车辆加速/让行意图,OccFormer识别安全变道空间 | 模块化系统常因预测与规划信息不同步导致犹豫或急刹 |
| 无保护左转 | MapFormer在线识别无信号灯路口结构,Planner结合行人/对向车流预测生成博弈式轨迹 | 依赖规则引擎的系统易陷入"鬼探头"困境 |
| 施工路段通行 | TrackFormer持续追踪移动的锥桶和工程车,MapFormer实时更新可行驶区域 | 基于预存地图的系统可能误判封闭车道 |
| 夜间低能见度 | BEV特征融合多摄像头数据增强感知,OccFormer通过运动模式补全遮挡区域 | 纯激光雷达方案在雨雾中性能下降显著 |
5.UniAD的核心架构
UniAD采用"规划导向"的设计理念,其架构包含五个主要模块:
- TrackFormer:执行检测和多目标追踪,使用轨迹查询从BEV(鸟瞰图)特征中获取场景信息。
- MapFormer:负责在线地图构建,将道路元素表示为地图查询,执行全景分割任务。
- MotionFormer:捕获场景中多个代理的交互关系,预测每个代理的未来轨迹。
- OccFormer:预测多步未来占用情况,并保留代理身份信息。
- Planner:利用前面模块的信息生成最终规划路径,基于牛顿法优化轨迹以避免碰撞。
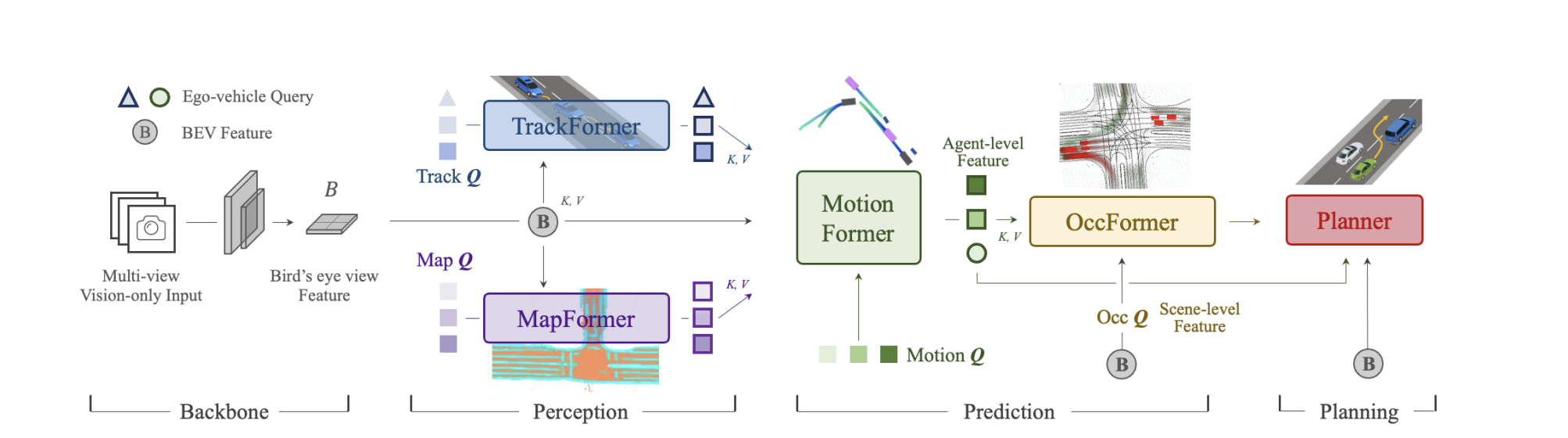
工作流程上,系统从多相机图像开始,通过BEVFormer转换为统一的鸟瞰图特征,然后依次通过各模块处理,最终生成行驶路径。
6.UniAD的优势与创新
6.1 技术创新点
- 查询机制:使用查询作为模块间接口,使系统能够灵活建模多个代理间的交互
- 非线性优化:在运动预测和规划模块采用优化策略,使轨迹符合物理可行性
- 像素-代理交互:在占用预测中设计了融合场景级和代理级理解的机制
6.2 理论上的应用优势
- 信息共享:各模块共享底层特征表示,减少信息损失
- 联合优化:整个系统端到端训练,所有模块协同优化
- 可解释性:保留明确中间表示,比纯黑盒端到端系统更可解释
7.实际落地面临的挑战
然而,从学术创新到工业应用,UniAD面临诸多现实挑战:
7.1 计算资源与成本
UniAD基于多个Transformer模块,计算需求相当可观:
- 可能需要高端计算平台,成本和功耗显著高于当前量产方案
- 对车载散热系统提出严苛要求
- 在算力优化和成本控制方面面临挑战
7.2 安全验证
传统模块化系统可通过ISO 26262等标准对各模块独立认证,而UniAD这样的统一系统面临更复杂的安全验证挑战:
- 联合训练机制可能导致系统行为难以预测
- 传统形式化验证方法可能无法应用
- 安全冗余设计需要重新思考
7.3 实验室性能与实际表现的差距
虽然UniAD在nuScenes基准测试中表现优异,但基准测试与实际道路环境存在显著差异:
- nuScenes数据集可能未充分覆盖极端天气、复杂交通规则等场景
- 标注质量和数据集偏差可能影响实际性能
- 长尾场景(如儿童突然闯入、非常规车辆)的处理能力有待验证
7.4 伦理决策与复杂交互
自动驾驶系统需要处理复杂的道德和伦理判断,这些问题在UniAD中尚未得到明确解决:
- 不可避免的碰撞情况下如何做出伦理决策
- 如何理解和适应各地区不同的驾驶文化和习惯
- 与人类驾驶员的交互和沟通机制
8. 与其他自动驾驶方案的比较
将UniAD与业界其他方案对比:
| 方案 | 架构特点 | 优势 | 劣势 |
|---|---|---|---|
| UniAD | 统一模块化 | 模块协同优化,减少信息损失 | 计算需求高,安全验证复杂 |
| 传统模块化 (Waymo) | 严格模块分离 | 安全验证成熟,失效模式明确 | 模块间信息传递可能有损失 |
| 纯视觉端到端 (Tesla) | 直接从视觉到控制 | 硬件需求较低,数据驱动 | 可解释性低,需海量数据 |
| 基于HD地图 (Mobileye) | 依赖高精度地图 | 定位精确,规划可靠 | 对地图依赖高,更新维护成本大 |
9. 未来发展方向
UniAD为自动驾驶架构带来了新思路,未来可能的发展方向包括:
- 计算优化:开发更高效算法和专用硬件,降低系统资源需求
- 安全框架:构建适合统一架构的安全验证方法和标准
- 数据多样性:扩展训练数据集,覆盖更多长尾场景和地区特性
- 可配置统一:设计在不同算力平台上可自适应调整的灵活架构
10. 结论
UniAD代表了自动驾驶架构设计的一次重要尝试,它打破了传统模块化系统的边界,探索了更紧密集成的可能性。从学术角度看,UniAD在nuScenes等基准测试上的出色表现证明了这种方法的潜力。
然而,从工程实现角度来看,UniAD距离量产应用仍有相当距离。计算需求、安全验证、实际道路适应性等问题都需要解决。自动驾驶发展需要学术创新与工程现实的平衡,不应过分夸大任何单一方法的革命性。
未来的自动驾驶系统可能会借鉴UniAD的部分理念,同时保留传统方法的工程实用性,形成更平衡的解决方案。作为研究人员和工程师,我们应该既欣赏UniAD等创新架构的理论价值,也务实地评估其在实际应用中的局限性。
自动驾驶的终极目标是安全、可靠、普惠的智能出行,这需要理论创新与工程实践的共同努力。


















 2082
2082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











