







 本文介绍了屏幕空间环境光遮蔽(SSAO)和水平基准环境光遮蔽(HBAO)的原理、实现及优化。SSAO通过获取深度和法线缓冲来计算环境光遮蔽,而HBAO则通过减少采样点并优化角度计算,提高性能。文章详细探讨了两种算法的优缺点,并提供了实际应用和优化策略。
本文介绍了屏幕空间环境光遮蔽(SSAO)和水平基准环境光遮蔽(HBAO)的原理、实现及优化。SSAO通过获取深度和法线缓冲来计算环境光遮蔽,而HBAO则通过减少采样点并优化角度计算,提高性能。文章详细探讨了两种算法的优缺点,并提供了实际应用和优化策略。
笔记
SSAO介绍
AO
环境光遮蔽,AmbientOcclusion。一种模拟光线到达物体的能力和粗略的全局方法。
SSAO
屏幕环境光遮蔽,Screen Space Ambient Occlusion, 一种实现环境光遮蔽遮蔽效果的渲染技术。通过获取像素的深度缓冲、法线缓冲来计算实现,来近似的表现物体在间接光下产生的阴影
历史
AO在Siggraph 2002年会由ILM展示
2007年,Crytek将SSAO应用于孤岛危机
原理
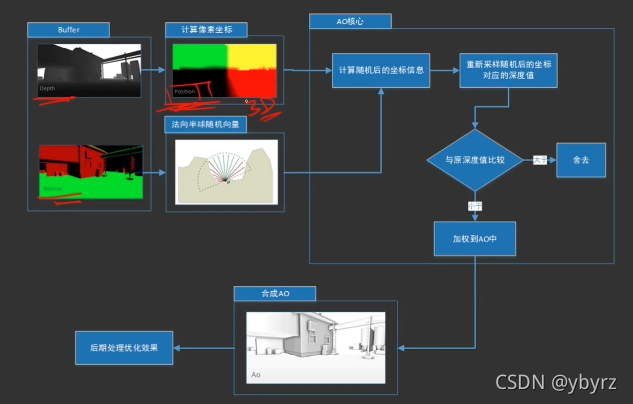
- 获取深度、法线缓冲
- 利用深度值,反推每个像素在世界空间中的三维位置
- 利用法线,得到法向半球
- 利用法向半球产生随机向量,计算像素随机后的坐标(多次采样)
- 与采样点的深度进行比较,加权到AO中
- 后期(模糊等)
SSAO算法实现
获取深度、法线缓冲数据
C#
private void Start(){
cam = this.GetComponent<Camera>();
cam.depthTextureMode = cam.depthTextureMode | DepthTextureMode.DepthNormals;
}
获取相机组件
深度纹理模式设置为 带深度 和 带法线的
Shader
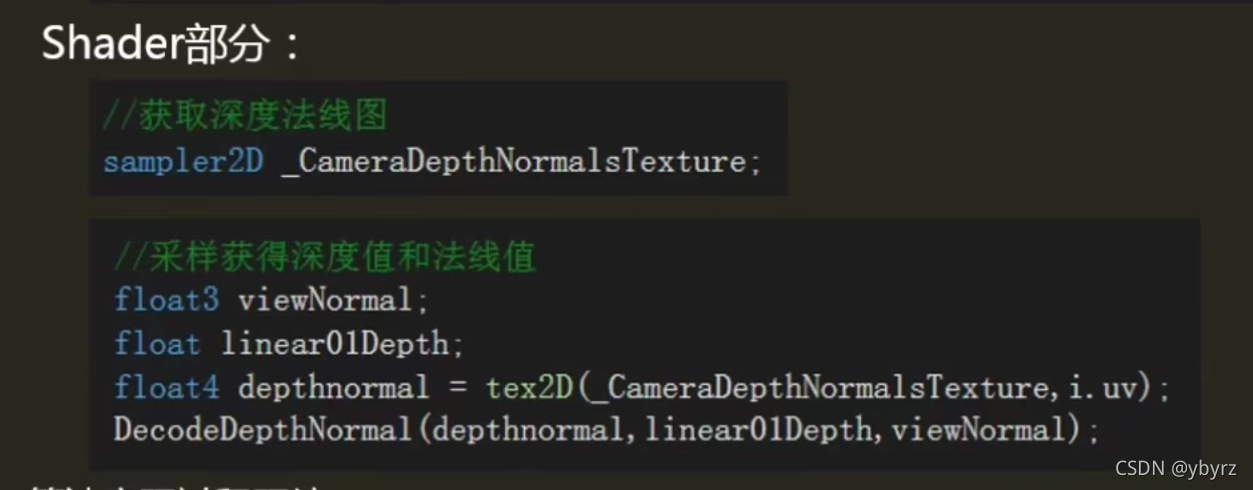
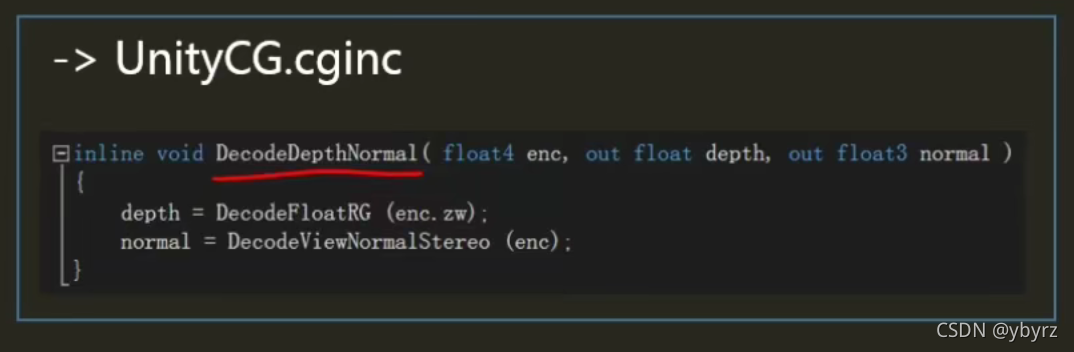
这里的UV是屏幕空间的UV
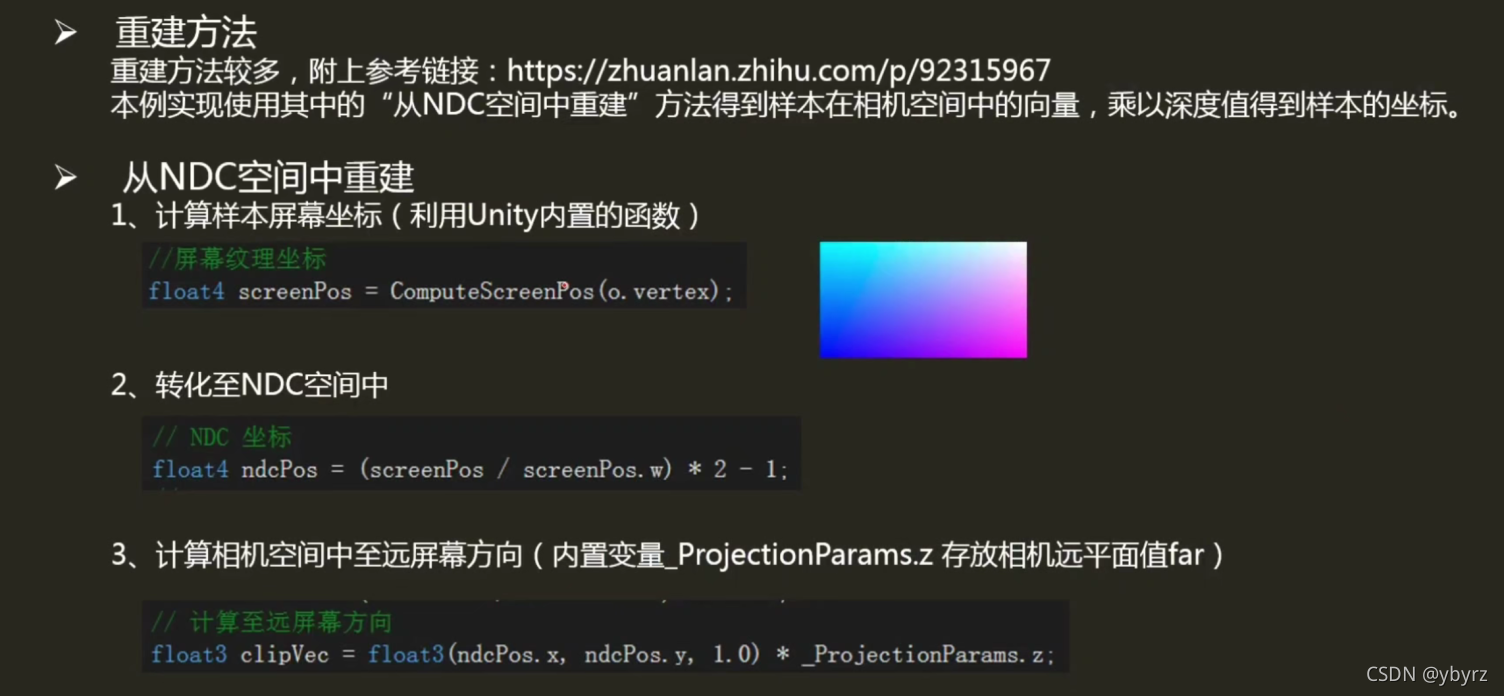
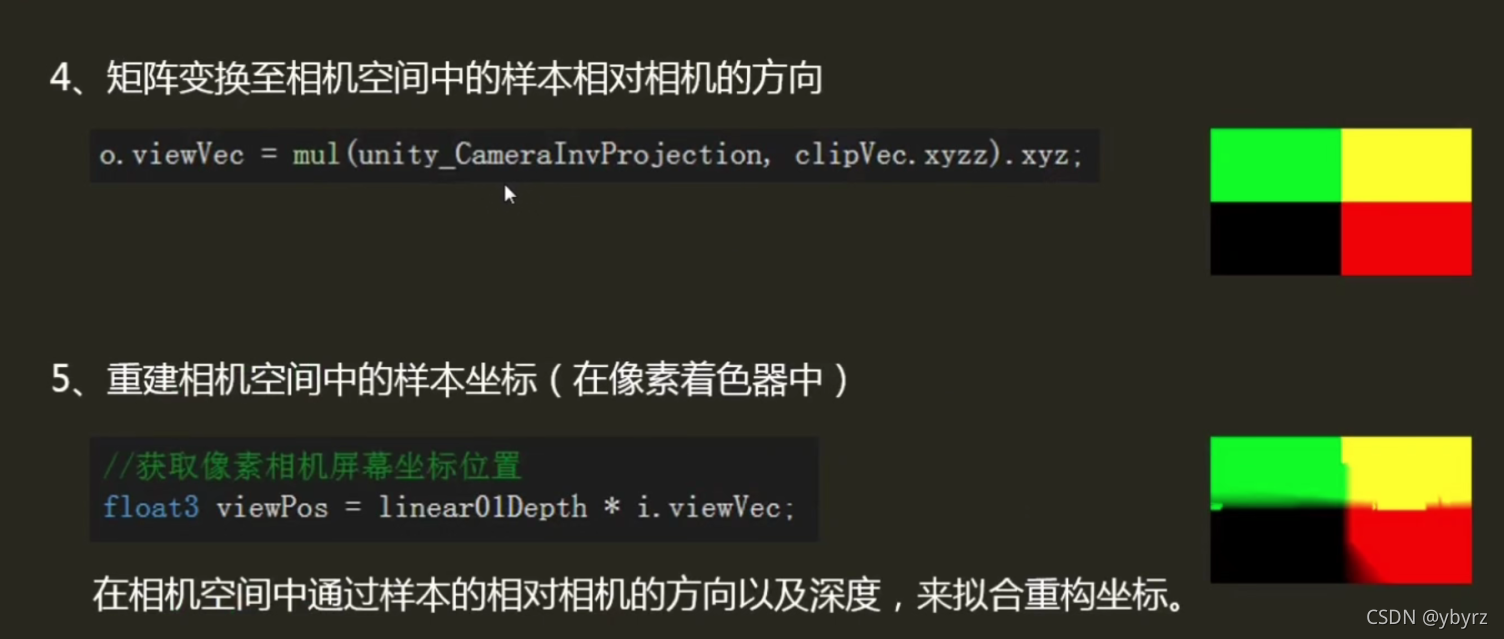
重建相机空间坐标
具体参考:https://zhuanlan.zhihu.com/p/92315967
构建法向量正交基
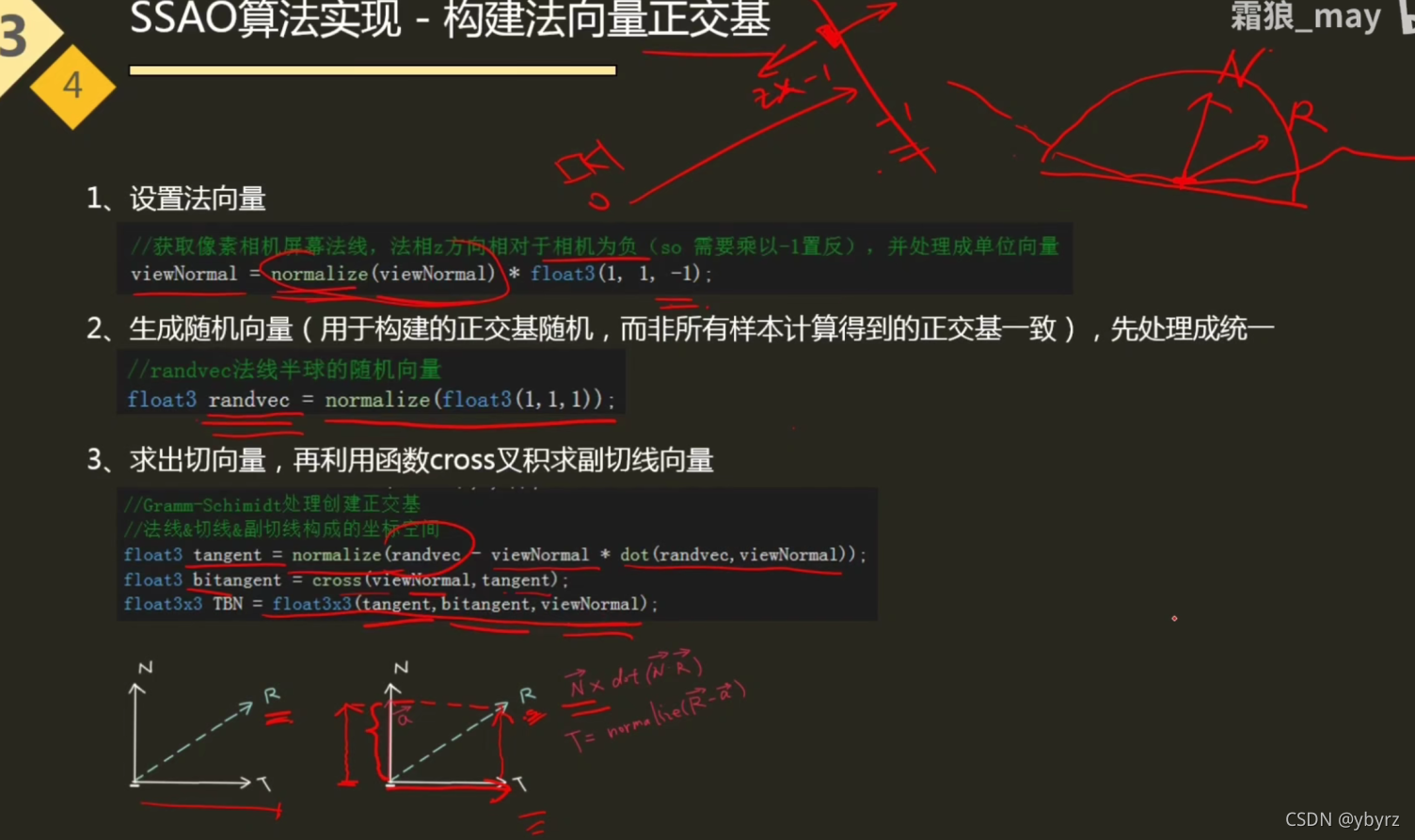
tangent其实是半球面上 随机的一个向量(随机的方法参考下文)

AO采样核心
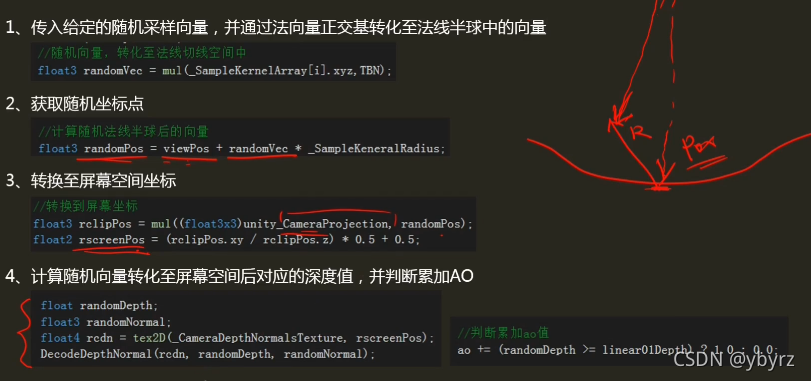
第二步:
_SampleKeneralRadius : 采样半球的半径长度
第三步:
因为都是在观察空间下进行的计算,所以得到randomPos后,乘以投影矩阵,再视图映射即可得到相应的屏幕坐标
rclipPos :即是球面上的点
SSAO优化
1. 随机正交基
应用于求法向半球的正交基时,其第二步生成随机变量。
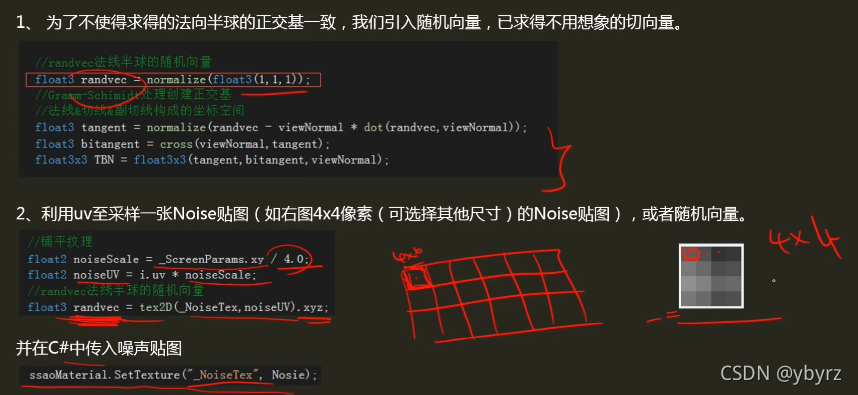
_ScreenParams.xy 是屏幕的长宽,除以4是为了对应4x4像素的贴图。
因为i.uv 的增量是 1/_ScreenParams.x 或 1/_ScreenParams.y ,noiseUV增量也即 x或y增0.25,也即Noise贴图走一个格子。
2. AO累加平滑优化——范围判断
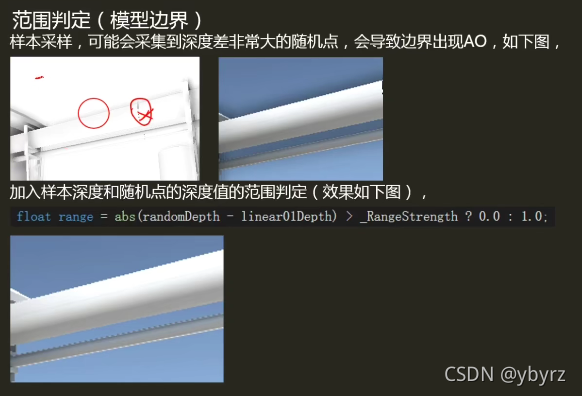
如果从天空盒的位置产生半球,采样到深度差很大的球体遮挡会产生ao,导致天空的像素上有阴影
加一个深度差绝对值的阈值判断,能够避免采样到深度差太大的无关遮挡
原本:

改成:

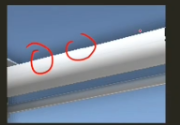
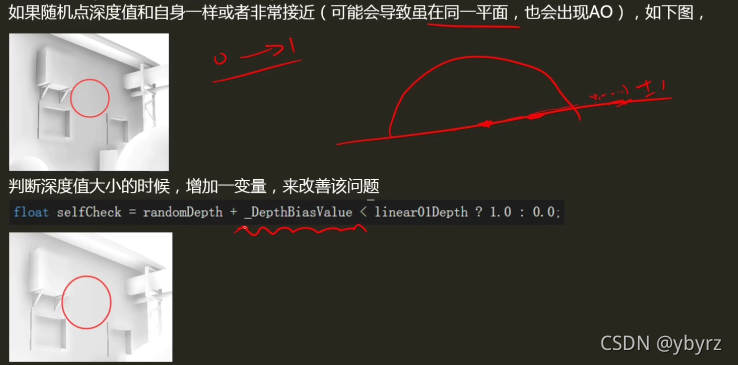
3. AO累加平滑优化——自身判断
4. AO累加平滑优化——AO权重
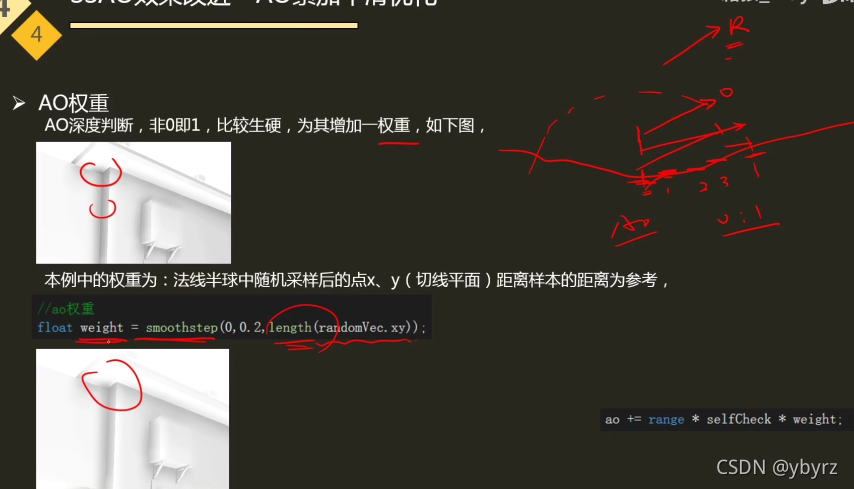
随机点的xy 越靠近的,权重越大
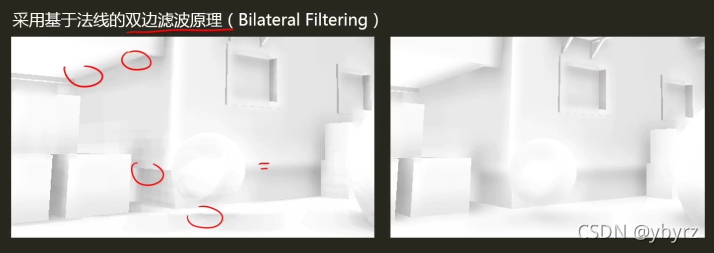
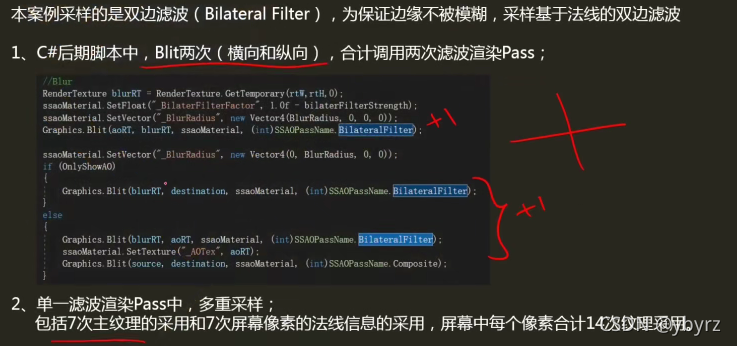
5. 模糊
烘培AO
三维建模软件烘培
烘培AO到纹理
优点:
- 单一物体可控性强(通过单一物体的材质球上的AO纹理贴图),可以控制单一物体的AO的强弱;
- 弥补场景烘焙的细节,整体场景的烘焙(包含AO信息),并不能完全包含单一物体细节上的AO,而通过三维建模软件烘焙到纹理的方式,增加物体的AO细节。
- 不影响其(Unity场景中)静态或者动态。
缺点:
- 操作较其它方式繁琐,需要对模型进行UW处理,再进行烘焙到纹理。
- 不利于整体场景的整合(如3DMax烘焙到纹理,只能选择单一物体,针对整体场景的处理工作量巨大);
- 增加AO纹理贴图,不利于资源优化(后期可通过其它纹理通道整合资源);
- 只有物体本身具有AO信息,获取物体之间的AO信息工作量巨大。
游戏引擎烘培AO
优点:
- 操作简易,整体场景的烘焙,包含AO的选择。
- 不受物体本身的UW影响,Unity通过Generate Lightmap UVs生成模型第二个纹理坐标数据。(TODO!!!不懂)
- 可以生成物体与物体之间的AO信息。
缺点: - 缺少单一物体的细节(可调整参数提高烘焙细节,但换之将增加烘焙纹理数量和尺寸,以及烘焙时间);
- 受物体是否静态影响,动态物体无法进行烘焙而获得AO信息。
SSAO优缺点
优点:
- 不依赖场景的复杂度,其效果质量依赖于最终图片像素大小。
- 实时计算,可用于动态场景。
- 可控性强,灵活性强,操作简单。
缺点: - 性能消耗较之上述2种方式更多,计算非常昂贵。
- AO质量上要比离线渲染烘焙(上述2种)不佳(理论上)。
SSAO性能消耗
主要在两个方面
AO法向半球的随机采样
- For结构代码
- 采样数:64 x 长 x 宽次AO核心计算
- 每个像素需要采样64次屏幕深度值、法线值

双边滤波的多重采样
作业
实现SSAO效果



使用其它AO算法实现进行对比
HBAO原理
全称Horizon-Based Ambient Occlusion,水平基准环境光遮蔽。
-
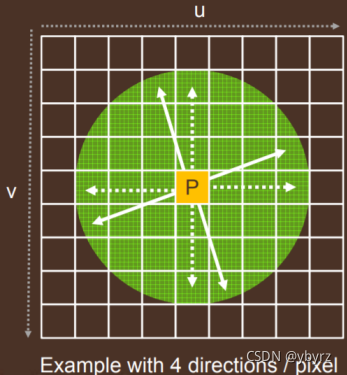
将360度分等份,在各个方向上做RayMarching,同时对这些方向加入随机旋转。下图以分4个方向来做
-
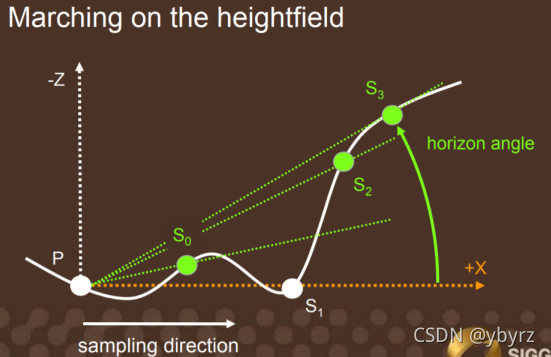
对于其中一个方向。再RayMarching过程中,得到一个最大的horizon angle(水平角)
-
根据点P及其法线,计算出切面角tangent angle
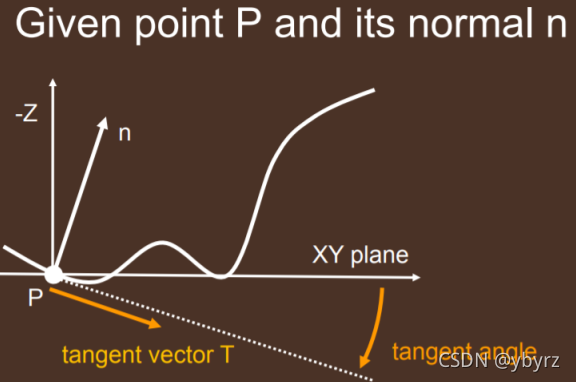
-
通过horizon angle 和 tangent angle,计算得出AO。(注意这里角度的范围,是实现的细节)
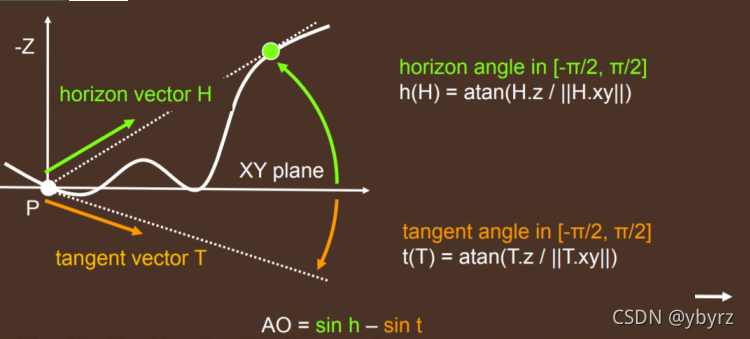
-
对其它三个方向相同操作,将AO值加起来平均后,得到最终点P的AO值
HBAO效果实现
核心代码:
fixed4 frag_Ao (v2f i) : SV_Target
{
//采样获得深度值和法线值
float3 viewNormal;
float linear01Depth;
float4 depthnormal = tex2D(_CameraDepthNormalsTexture,i.uv);
DecodeDepthNormal(depthnormal,linear01Depth,viewNormal);
//获取像素相机屏幕坐标位置
float3 viewPos = reconstructViewPos(i.uv);
//获取像素相机屏幕法线,法相z方向相对于相机为负(so 需要乘以-1置反),并处理成单位向量
viewNormal = normalize(viewNormal) * float3(1, 1, -1);
float deltaAngle = 2.0 * UNITY_PI / _RayAngleStep;
// 1/屏幕分辨率宽w , 1/屏幕分辨率高h
float2 InvScreenWH = _ScreenParams.zw - 1.0;
//_RayMarchingRadius 屏幕空间的采样半径
float rayMarchingStepSize = _RayMarchingRadius/_RayMarchingStep;
//采样核心
float ao = 0;
for(int j = 1; j <= _RayAngleStep; j++)
{
float uvAngle = deltaAngle * j;
float maxHAngle = _AngleBias;
//两个叉乘求tangent线
float3 marchingDir = float3(GetRayMarchingDir(uvAngle), 0.0f);
float3 temp = cross(marchingDir , viewNormal);
float3 tangent = cross(temp, viewNormal);
float sinTangentAngle = length(tangent.z)/length(tangent);
sinTangentAngle *= tangent.z > 0.0f ? 1.0f : -1.0f;
for(int k = 1; k < _RayMarchingStep; k++)
{
float2 deltaUV = round( marchingDir * rayMarchingStepSize * k) * InvScreenWH;
float2 stepUV = i.uv + deltaUV ;
float3 pointPos = reconstructViewPos(stepUV);
float3 diffPos = pointPos - viewPos;
float exist = (diffPos.z < -0.04 ? 1.0 : 0.0);//差值z需小于0,并且加一点bias//这个漏了,明显错误,想了好久
float sinHAngle = length(diffPos.z)/length(diffPos) * exist;
if(sinHAngle > maxHAngle)
{
maxHAngle = sinHAngle;
}
}
if(maxHAngle > _AngleBias)
{
ao += maxHAngle - sinTangentAngle;
}
}
ao = ao / _RayAngleStep;
float4 color;
color = max(0.0, 1 - ao * _AOStrength);
color.a = 1;
return color;
}
补充函数
inline float2 RotateDirections(float2 dir, float2 rot)
{
return float2(dir.x * rot.x - dir.y * rot.y,
dir.x * rot.y + dir.y * rot.x);
}
inline float2 GetRayMarchingDir(float angle)
{
float sinValue, cosValue;
sincos(angle, sinValue, cosValue);
return RotateDirections(float2(cosValue, sinValue), float2(1.0, 0));
}
float3 reconstructViewPos(float2 uv)
{
float3x3 proj = (float3x3)unity_CameraProjection;
float2 p11_22 = float2(unity_CameraProjection._11, unity_CameraProjection._22);
float2 p13_31 = float2(unity_CameraProjection._13, unity_CameraProjection._22);
float depth;
float3 viewNormal;
float4 cdn = tex2D(_CameraDepthNormalsTexture, uv);
DecodeDepthNormal(cdn, depth, viewNormal);
depth *= _ProjectionParams.z;
return float3((uv * 2.0 - 1.0 - p13_31) / p11_22 * (depth), depth);
}

对比HBAO、SSAO
- HBAO性能是有较大提升的,更适用于移动端。HBAO采样数大量减少,如果一个像素采样4个方向,4个RayMarching的话,也即16个采样点。而SSAO 要64个采样点,相当于4倍。其实可以理解为HBAO的通过角度的大小,节约了一部分的采样点。
- 效果上看,HBAO近处的细节相比于SSAO,是会差一截的。原因是步进(RayMarching)是基于屏幕的,越近,像素点之间的信息就越少。
HBAO优化
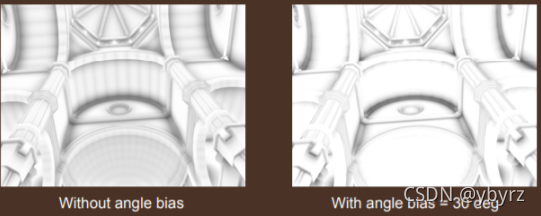
1. 基础阈值
当sin(H)大于一个bias时,才有ao
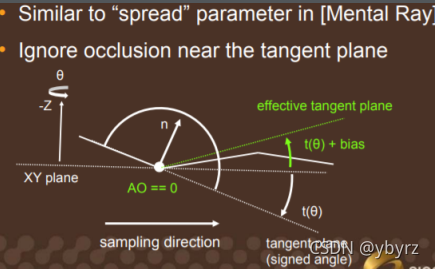
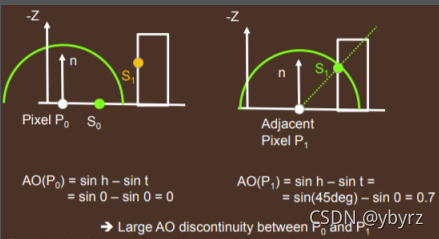
2. 非连续问题
只有在半球区域内的遮挡才有效,与避免从天空盒采样到遮挡同理。


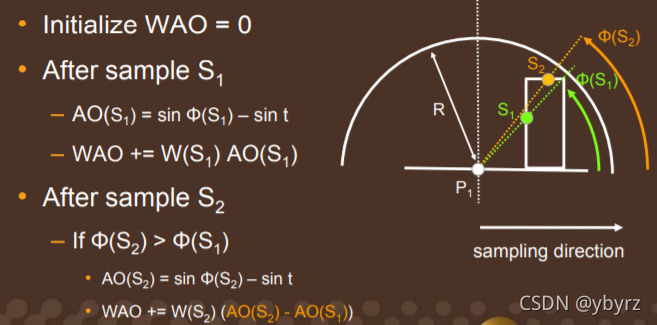
3. 衰减
离像素点越远的采样点,影响应该越小
使用公式:W(r)= 1 - r²


其它AO
GTAO,Bent Normal,AAO,TSSAO,VXAO,UE4的Distance Filed Ambient Occlusion
参考资料
https://www.bilibili.com/video/BV16q4y1U7S3?p=2
https://developer.download.nvidia.cn/presentations/2008/SIGGRAPH/HBAO_SIG08b.pdf
https://blog.csdn.net/puppet_master/article/details/82929708

















 1626
1626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









