







“不必遗憾。若是美好,叫做精彩。若是糟糕,叫做经历。”
2018年的最后一天
希望今年所有的遗憾,都是明年惊喜的铺垫!
致所有努力的人~
将KF、EKF、UKF在自动驾驶传感器融合当中的应用整理下吧:
卡尔曼滤波(KF)、扩展卡尔曼滤波(EKF)、无损卡尔曼滤波(UKF)
首先要搞清楚两个问题:1. 为什么要用KF、EKF、UKF?
2. 什么是KF、EKF、UKF?
先从最简单的KF说起吧~
由于传感器本身的局限性以及自然界存在的噪声影响,导致我们依据传感器获取的任何测量结果都是有误差的,也就是我们通常无法精确的知道物体当前的状态。因此我们为了估计一个事物的状态,往往会去测量它,但是我们不能完全相信我们的测量,因为我们的测量是不精准的,它往往会存在一定的噪声,这个时候就需要在传感器测量结果的基础上,对目标的运动状态进行跟踪估计,以此来保证障碍物的位置、速度等信息不会发生突变而且是准确的。
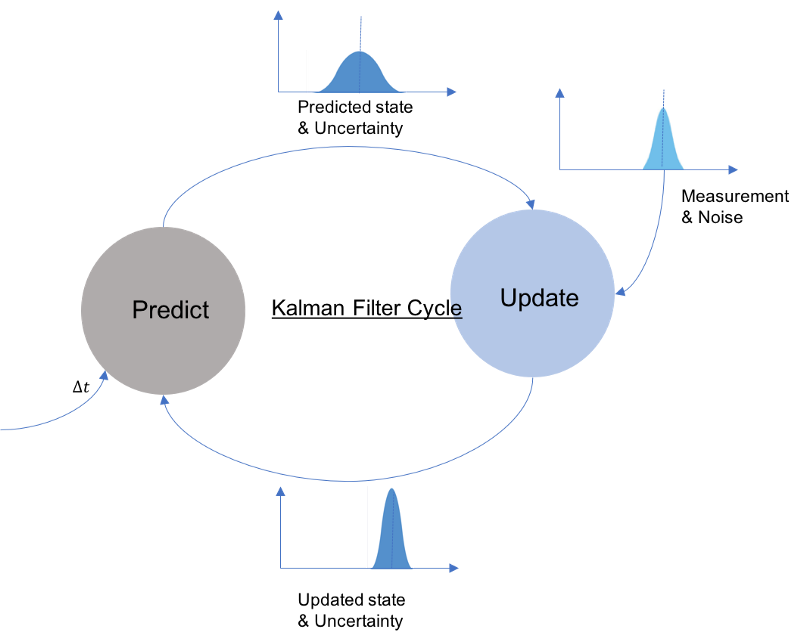
KF、EKF以及UKF则是几种结合预测(先验分布)和测量更新(似然)的状态估计算法。这些算法能够应用于目标状态估计(目标可以是行人,车辆、GPS数据等)。
具体介绍KF的例程,网上的资料太多了,在此就不细说了,其实总的来说就3部分:初始化,预测,测量更新。
推荐两个网址:1. 知乎的陈光大神:https://zhuanlan.zhihu.com/p/45238681
2. AdamShan博客专家:https://blog.csdn.net/AdamShan/article/details/78248421
核心公式:
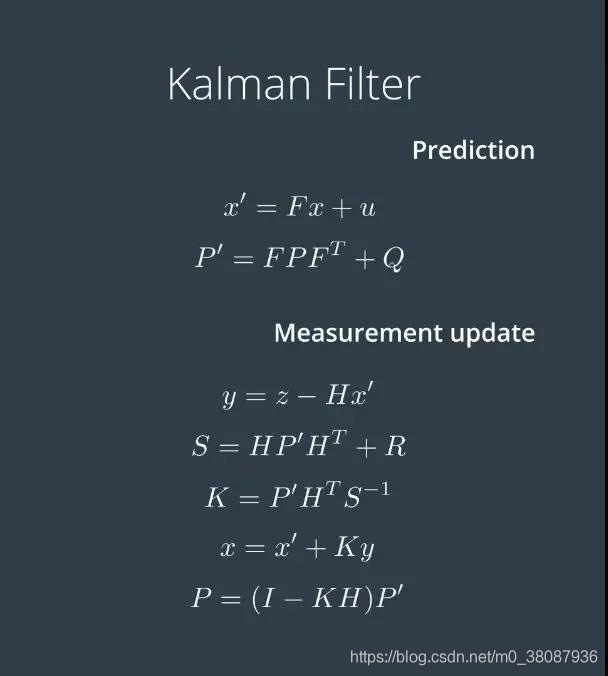
对于KF来讲,比较简单,而且Opencv里也有对应的cv::KalmanFilter模块,可以直接使用,其实它内部实现也是根据以上核心共式来封装的;当然也可以自己实现,下面就分别两种方法给出代码:
1.使用opencv里封装好的写的一个.hpp
/**************************************************************************
* @author z.h
* @date 2018.12.28
* usage:kalman_filter_cv.hpp //opencv
*
**************************************************************************/
#ifndef KALMAN_FILTER_CV_H
#define KALMAN_FILTER_CV_H
#include <opencv2/opencv.hpp>
class kalman_filter_cv
{
public:
kalman_filter_cv();
~kalman_filter_cv();
void _init(std::vector<float> v, int _mode)
{
if(_mode == 4)
{
state_num = 4;
measure_num = 2;
kf.init(state_num, measure_num, 0);
kf.transitionMatrix = (cv::Mat_<float>(state_num, state_num) <<
1, 0, 1, 0,
0, 1, 0, 1,
0, 0, 1, 0,
0, 0, 0, 1);
setIdentity(kf.measurementMatrix, cv::Scalar::all(1));
setIdentity(kf.processNoiseCov, cv::Scalar::all(1e-5));
setIdentity(kf.measurementNoiseCov, cv::Scalar::all(1));
setIdentity(kf.errorCovPost, cv::Scalar::all(1));
kf.statePost.at<float>(0, 0) = v[0];
kf.statePost.at<float>(1, 0) = v[1];
kf.statePost.at<float>(2, 0) = 0;
kf.statePost.at<float>(3, 0) = 0;
}
else if(_mode == 8)
{
state_num = 8;
measure_num = 4;
kf.init(state_num, measure_num, 0);
kf.transitionMatrix = (cv::Mat_<floa 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1295
1295











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









