







 本文是宾夕法尼亚大学Kumar教授关于Robotics:Aerial Robotics课程的笔记,重点讨论了四旋翼飞行器的基本力学、一维线性控制、设计考虑因素(推重比和能耗)以及机动性和尺寸影响。介绍了四旋翼在悬停时的力学原理,动态控制的一维高度控制,推重比如何影响控制系统,并分析了尺寸变化对四旋翼性能的影响。
本文是宾夕法尼亚大学Kumar教授关于Robotics:Aerial Robotics课程的笔记,重点讨论了四旋翼飞行器的基本力学、一维线性控制、设计考虑因素(推重比和能耗)以及机动性和尺寸影响。介绍了四旋翼在悬停时的力学原理,动态控制的一维高度控制,推重比如何影响控制系统,并分析了尺寸变化对四旋翼性能的影响。
Robotics:Aerial Robotics (空中机器人) (二)
week1.2 Energetics and System Design
该专栏为Coursera上宾夕法尼亚大学Kumar教授的课程——Robotics:Aerial Robotics的课程笔记和整理
原课程链接:https://www.coursera.org/learn/robotics-flight?specialization=robotics
知乎同文:https://zhuanlan.zhihu.com/p/482780836
Basic Mechanics (基本力学)
首先,我们来看四旋翼的基本力学原理。
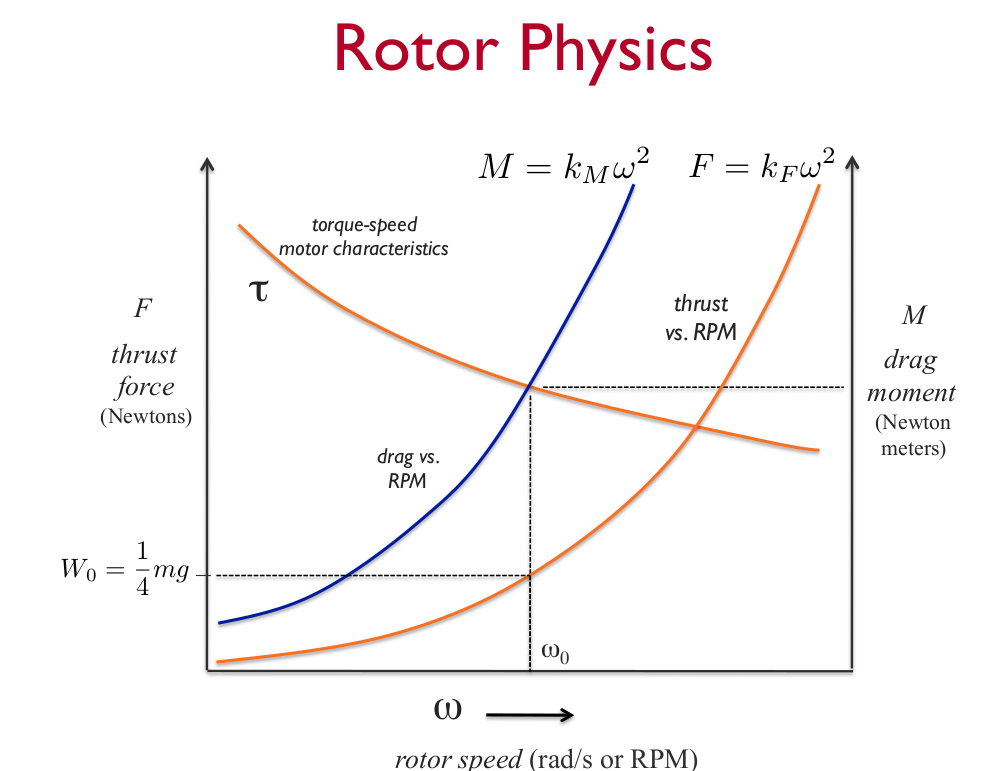
每个rotor(旋翼?)产生的推力(Thrust)与转速成二次关系(approximately quadratic),即
F = k F ω 2 F = k_F\omega^2 F=kFω2
rotor 旋转时,需要克服阻力矩(Drag moment),阻力矩与转速也近似成二次关系,即
M = k M ω 2 M = k_M\omega^2 M=kMω2
因此,对于四旋翼来说,当处于悬停状态时,每个rotor都需要克服 1 4 \frac{1}{4} 41的重力。通过推力与转速的关系曲线,我们就可以确定产生这些力所需的转速 ω 0 \omega_0 ω0。
当然,rotor要达到指定的转速,就需要克服阻力,这就需要引入motor了,根据motor的torque-speed 特性来选择合适的电机,以产生足够的扭矩来克服阻力矩。
综上,四旋翼悬停时,rotor通过转速补偿自身重力,根据重力即可确定rotor转速,这同时也给出了每个motor所需施加的扭矩大小。
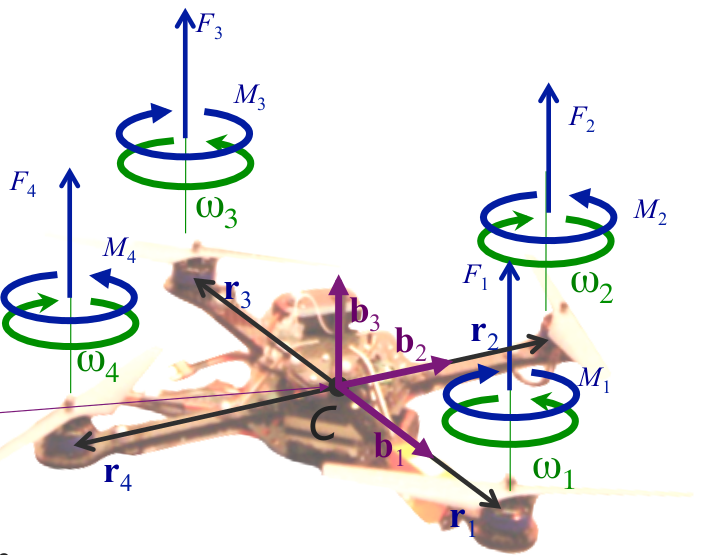
四旋翼的受力分析如图所示。合力为四个rotor的推力和自身的重力,合力矩为rotor施加的力矩和对应的阻力矩。
F i = k F ω i 2 M i = k M ω i 2 Resultant Force: F = F 1 + F 2 + F 3 + F 4 − m g a 3 Resultant Moment: M = r 1 × F 1 + r 2 × F 2 + r 3 × F 3 + r 4 × F 4 + M 1 + M 2 + M 3 + M 4 F_i = k_F\omega_i^2\\ M_i =k_M\omega_i^2\\ \text{Resultant Force:}\ \ \ \mathbf{F}=\mathbf{F}_1+\mathbf{F}_2+\mathbf{F}_3+\mathbf{F}_4-mg\mathbf{a}_3\\ \text{Resultant Moment:}\ \ \ \mathbf{M}=\mathbf{r}_1\times\mathbf{F}_1+\mathbf{r}_2\times\mathbf{F}_2+\mathbf{r}_3\times\mathbf{F}_3+\mathbf{r}_4\times\mathbf{F}_4\\ \qquad \qquad \qquad \qquad +\mathbf{M}_1+\mathbf{M}_2+\mathbf{M}_3+\mathbf{M}_4 Fi=kFωi2Mi=kMωi2Resultant Force: F=F1+F2+F3+F4−mga3Resultant Moment: M=r1×F1+r2×F2+r3×F3+r4×F4+M1+M2+M3+M4
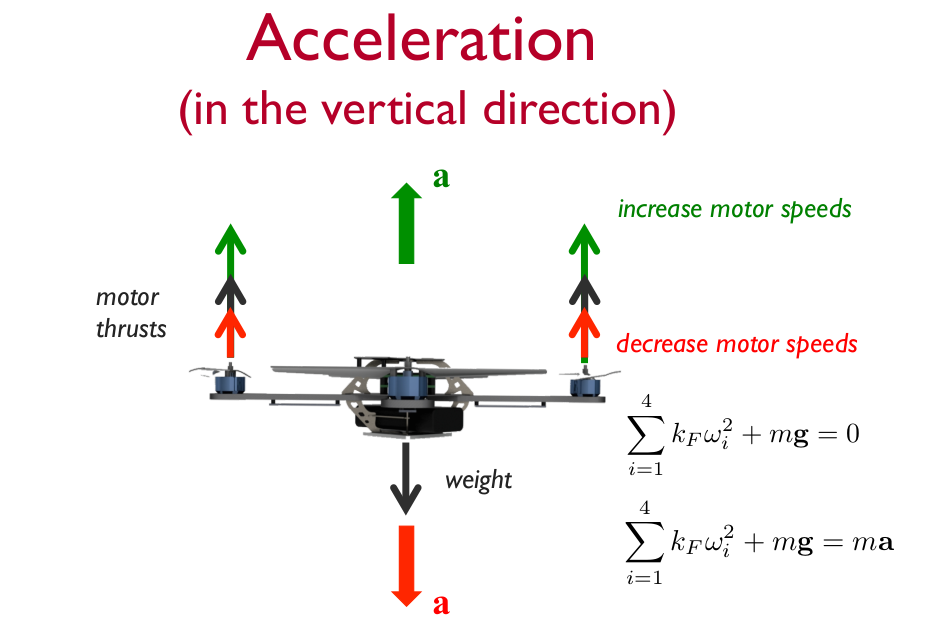
当处于平衡状态时,合力和合力矩均为0。而当合力不为0时,就产生了加速度。因此,推力和重力决定了无人机的运动方式。
Dynamics and 1-D Linear Control (一维控制)
本节仅讨论一维方向——高度的控制。
首先考虑垂直方向的动力学方程:
∑ i = 1 4 k F ω i 2 + m g = m a \sum_{i=1}^{4} k_{F} \omega_{i}^{2}+m \mathbf{g}=m \mathbf{a} i=1∑4kFωi2+mg=ma
我们选择加速度作为系统输入量 u u u,系统状态为 x x x,则
Input u = 1 m [ ∑ i = 1 4 k F ω i 2 + m g ] \text { Input } \quad u=\frac{1}{m}\left[\sum_{i=1}^{4} k_{F} \omega_{i}^{2}+m \mathbf{g}\right] Input u=m1[i=1∑4kFωi
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 618
618

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









