






目录
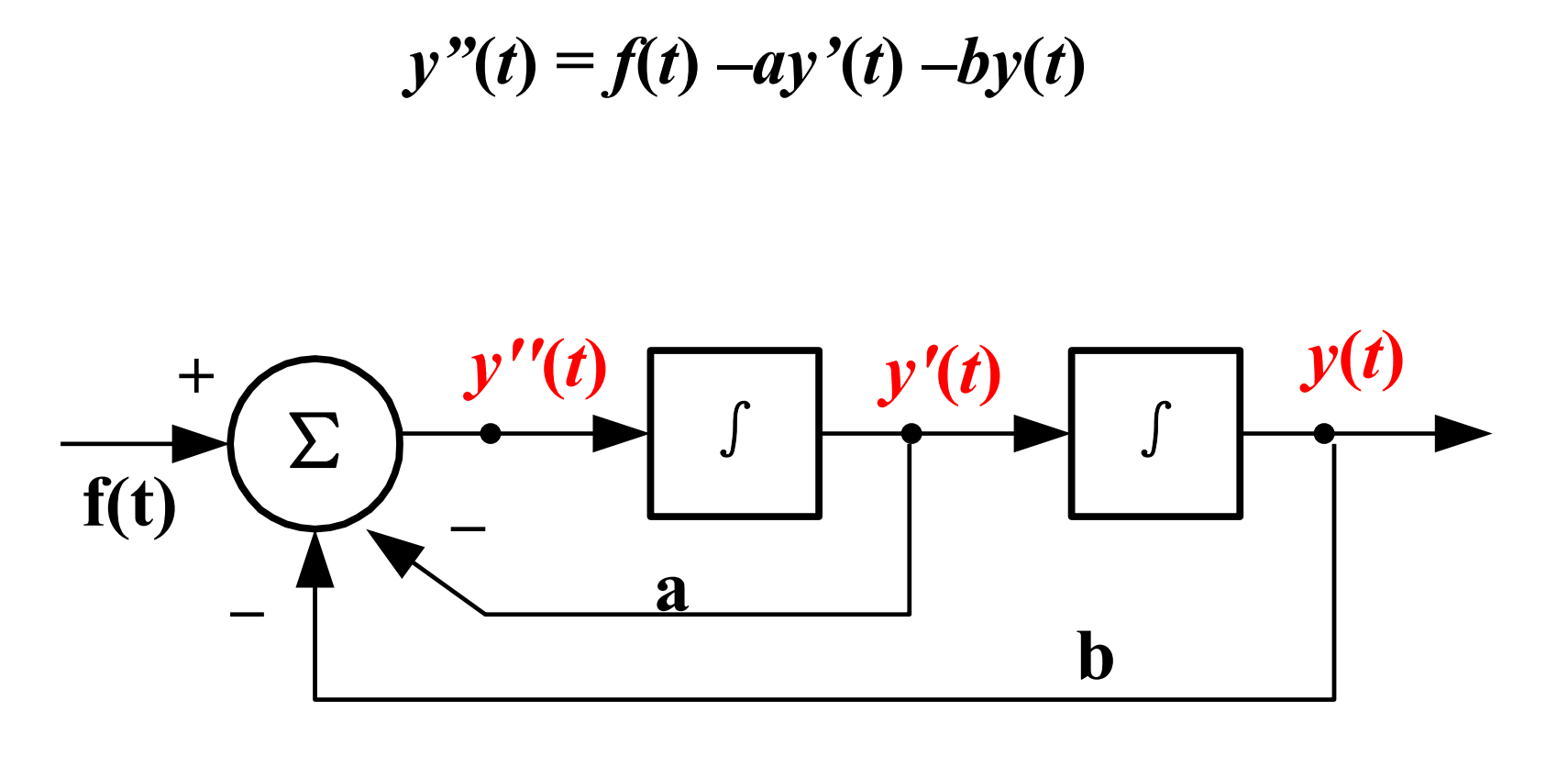
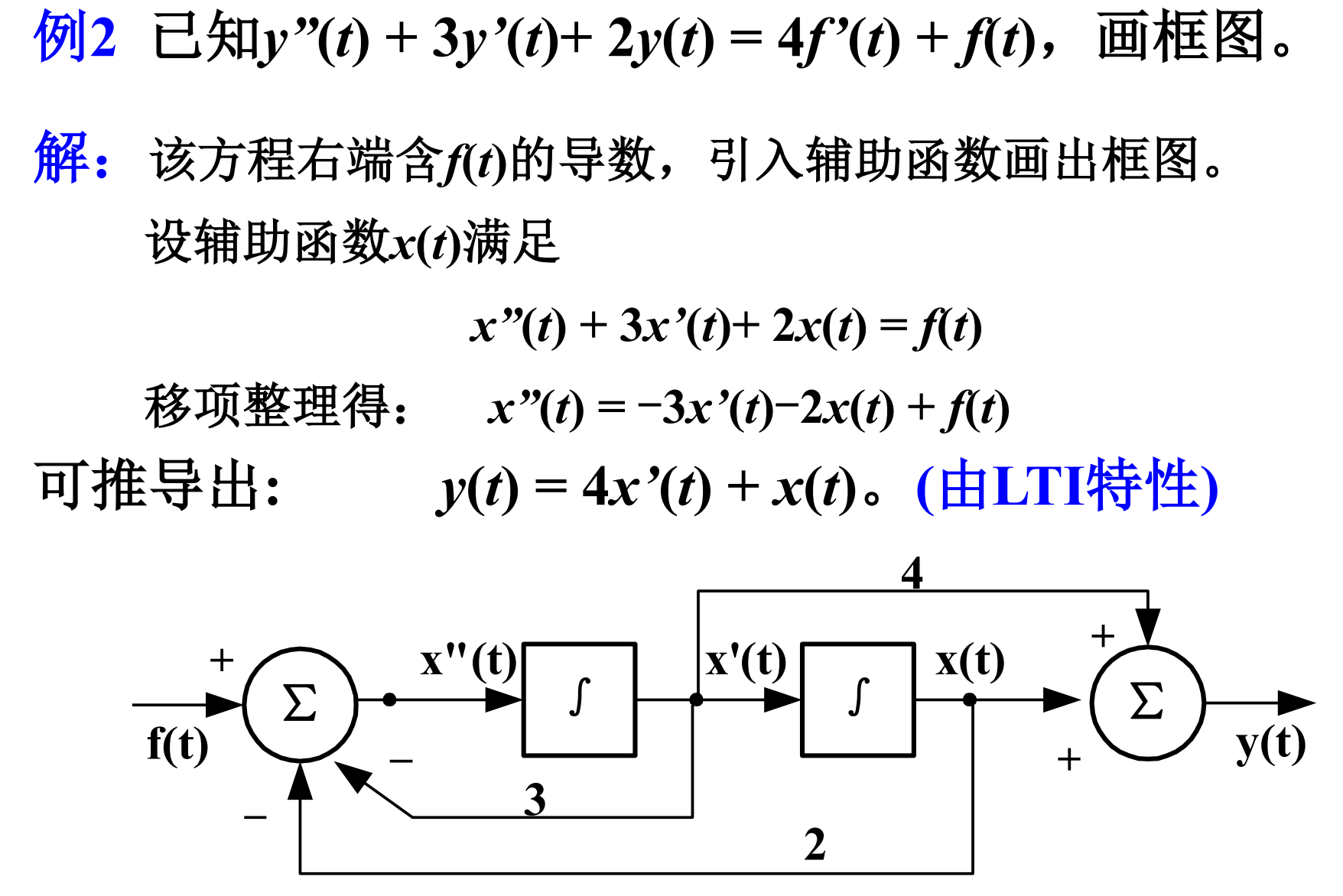
1.微分方程的求解与框图
y=齐次解+特解 参见考研数学
微分方程的右边代表着激励,左边代表着响应
重点看求和的地方
2.系统的初始值
2.1 概念
初始值是n阶系统在t=0时接入激励,其响应在 时刻的值,即
时刻的值,即 (j=0,1,2…,n-1)。
(j=0,1,2…,n-1)。
初始状态是指系统在激励尚未接入的 时刻的响应值
时刻的响应值 ,该值反映了系统的历史情况,而与激励无关。0-用来表征零输入响应
,该值反映了系统的历史情况,而与激励无关。0-用来表征零输入响应
2.2 求解
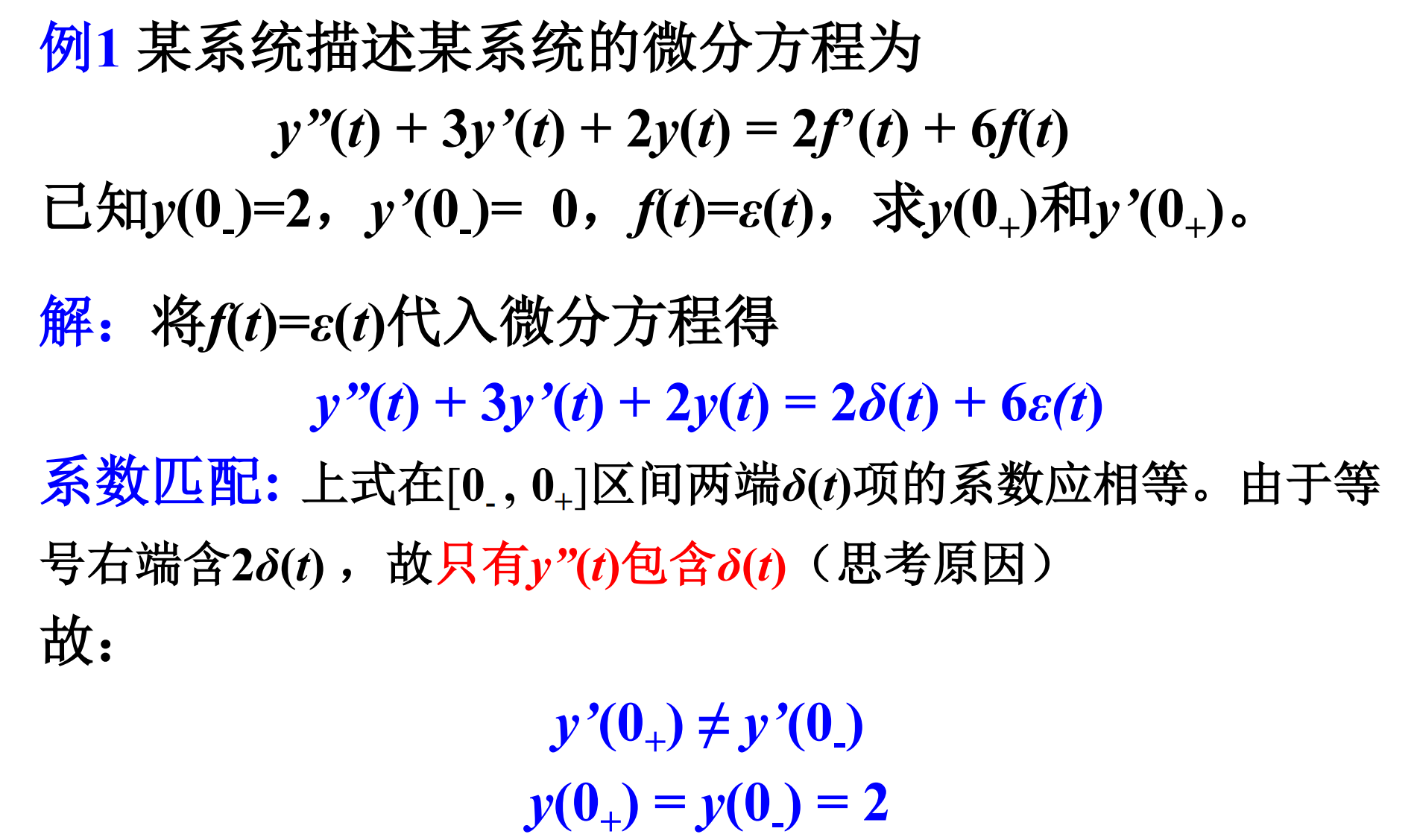
思考:
a.只有阶跃求导才会出现冲激,因为方程右边有冲激,只能方程左边二阶导对应冲激,否则若一阶导对应冲激,则二阶导会出现冲激的导数,不符合上式。
b.y(t)应该在0点附近是连续的,否则若出现阶跃,则一阶导会出现冲激,不符合上式。

根据思考得出结论:如上
3.零状态响应与零输入响应
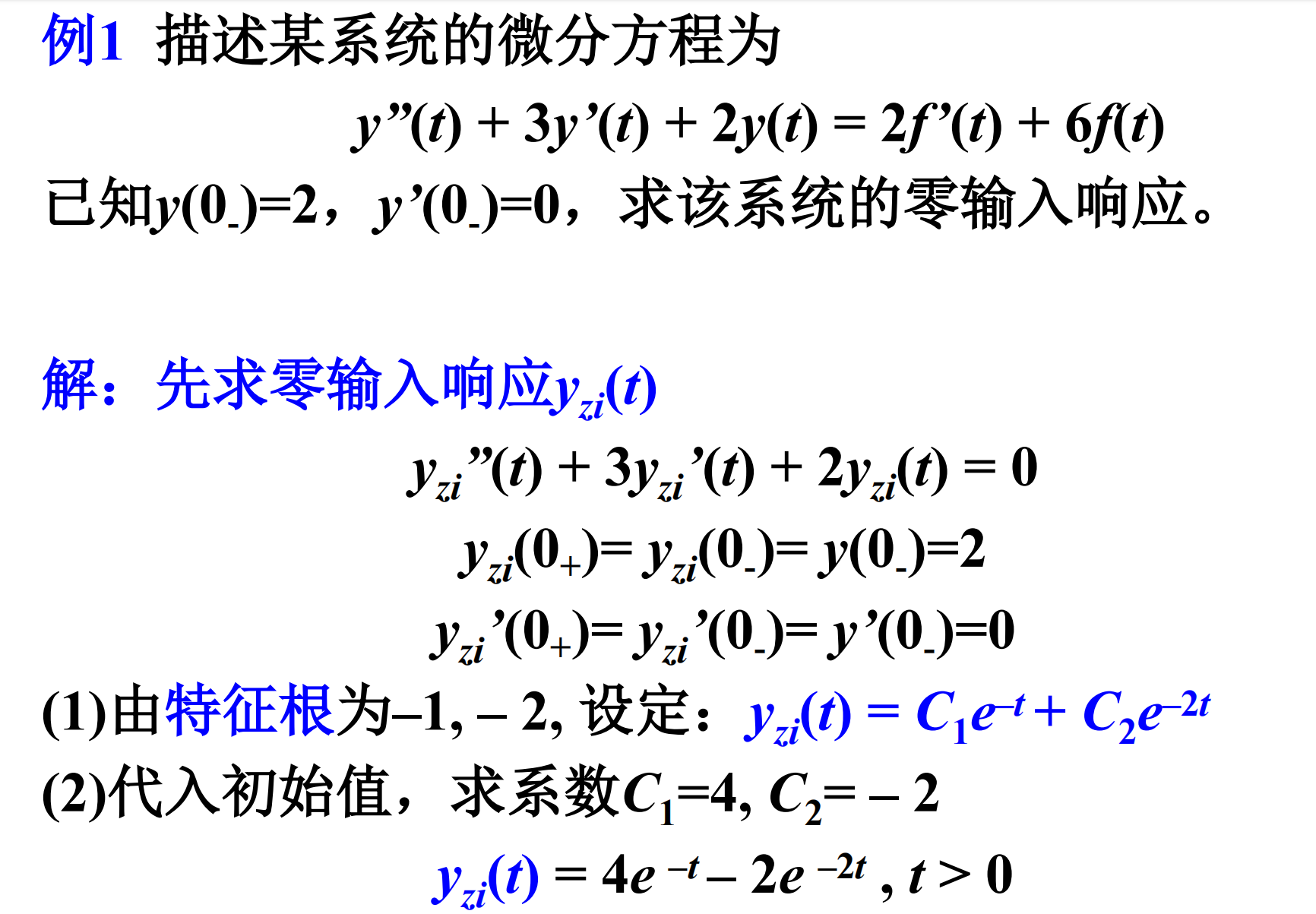
零输入对应输入为0,也即对应着齐次微分方程,即等号右边为0,即无输入,同时由于对应齐次微分方程,故在0点附近时连续的,即有
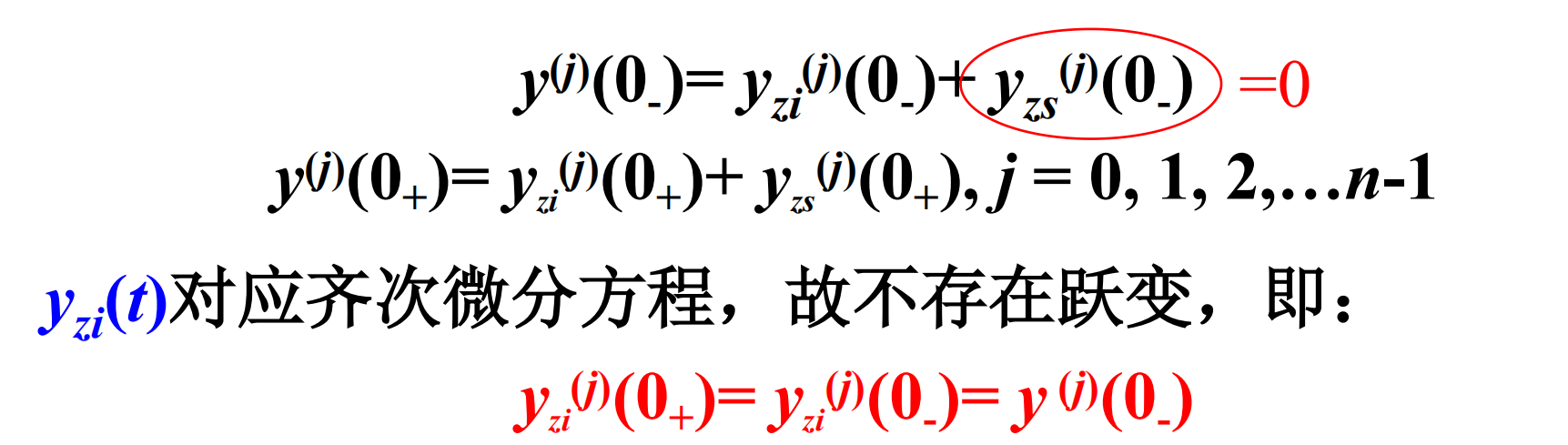
零输入的y(0-)不为0
例:
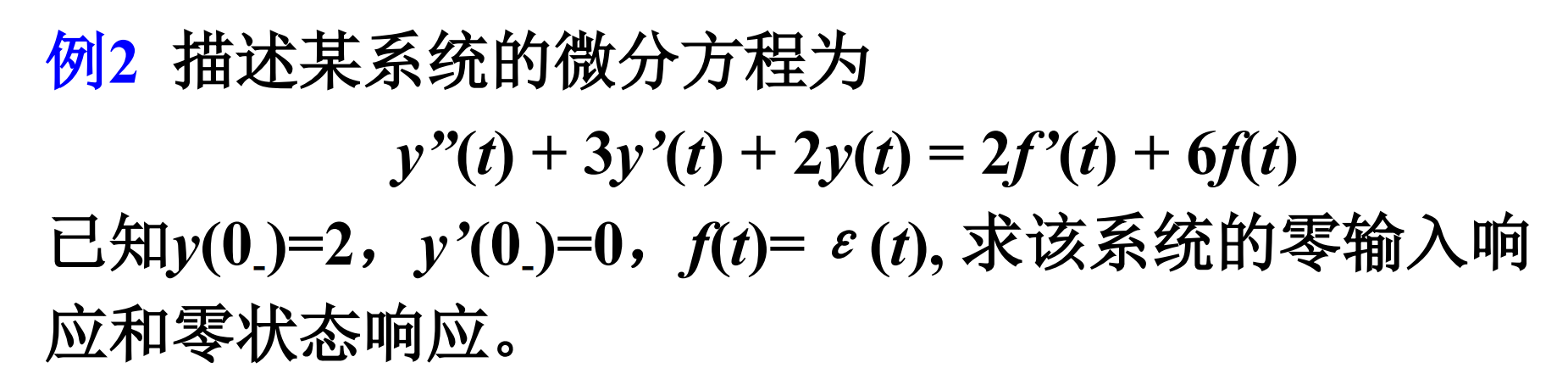
零状态对应状态为0,对应着非齐次微分方程,即等号右边不为0,即有输入,求解方法如下:
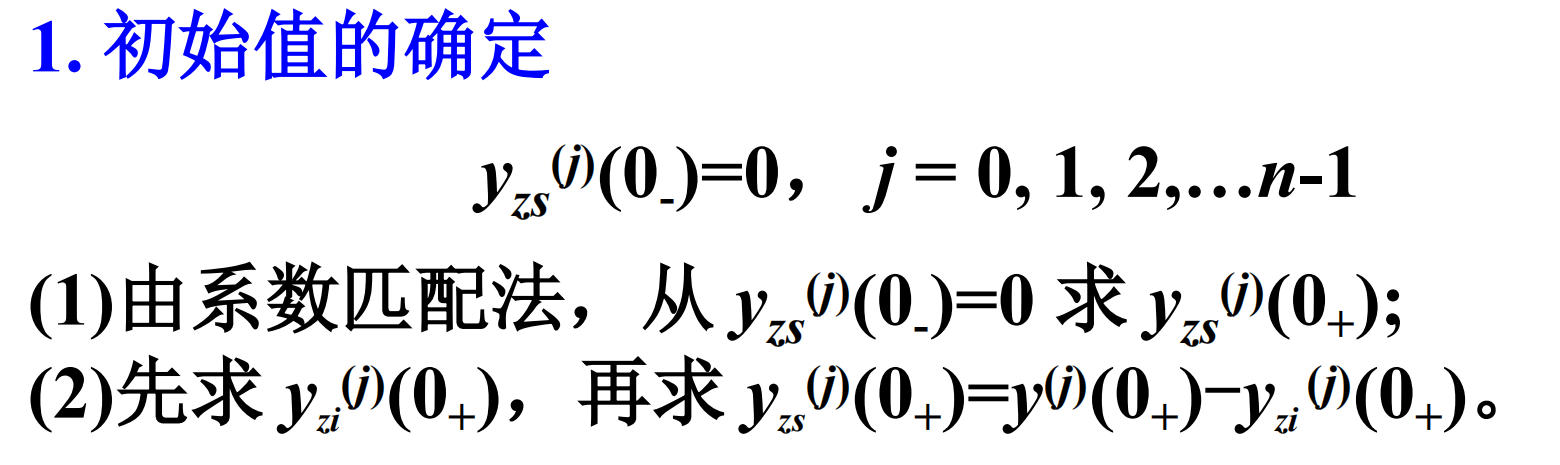
零状态的y(0-)为0,0-时的值为0,因为没有输入,采用0+的值确定微分方程
例:
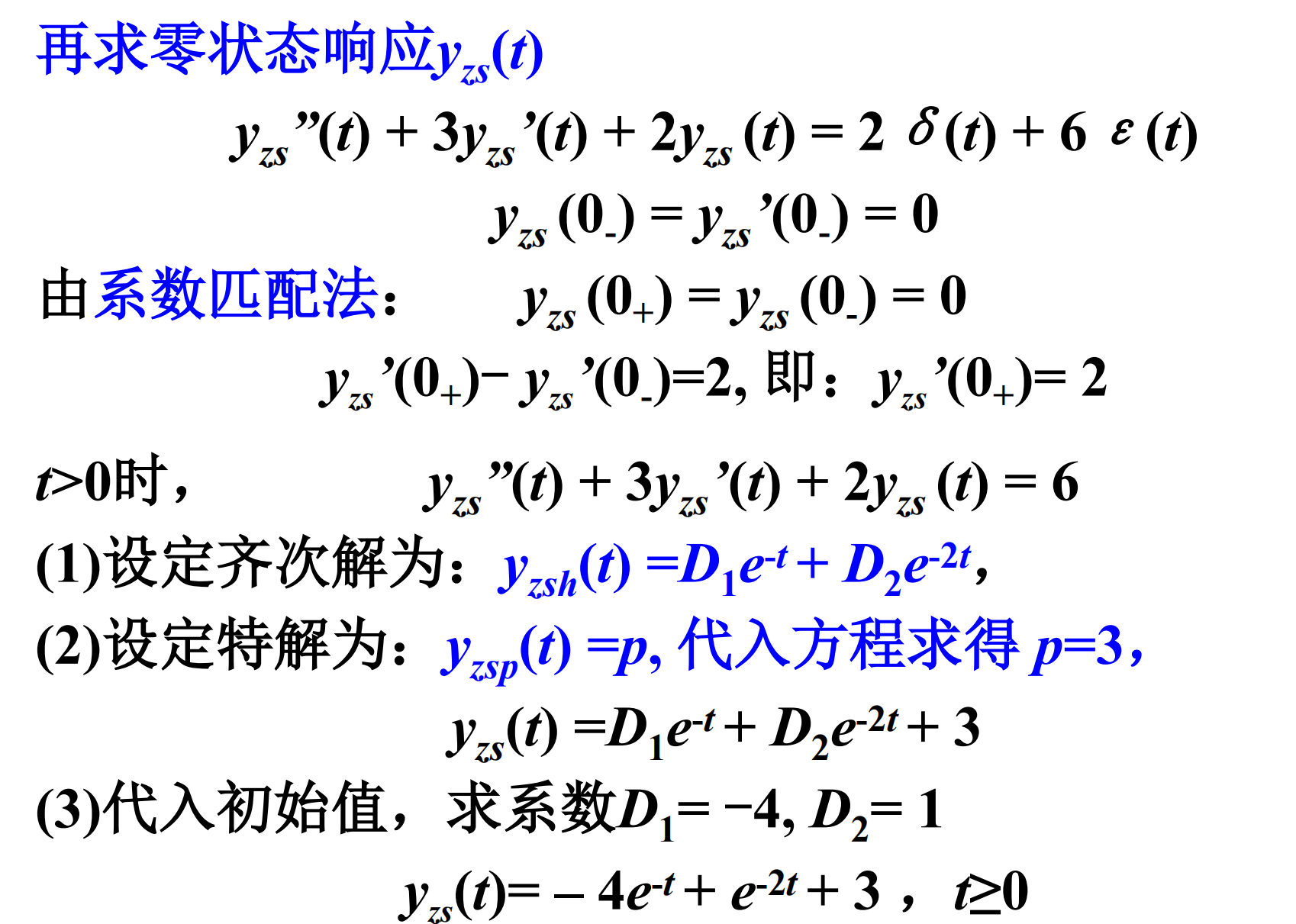
系数匹配法就是上面的判断冲激函数在哪,从而根据有没有阶跃判断值的变化(思考)
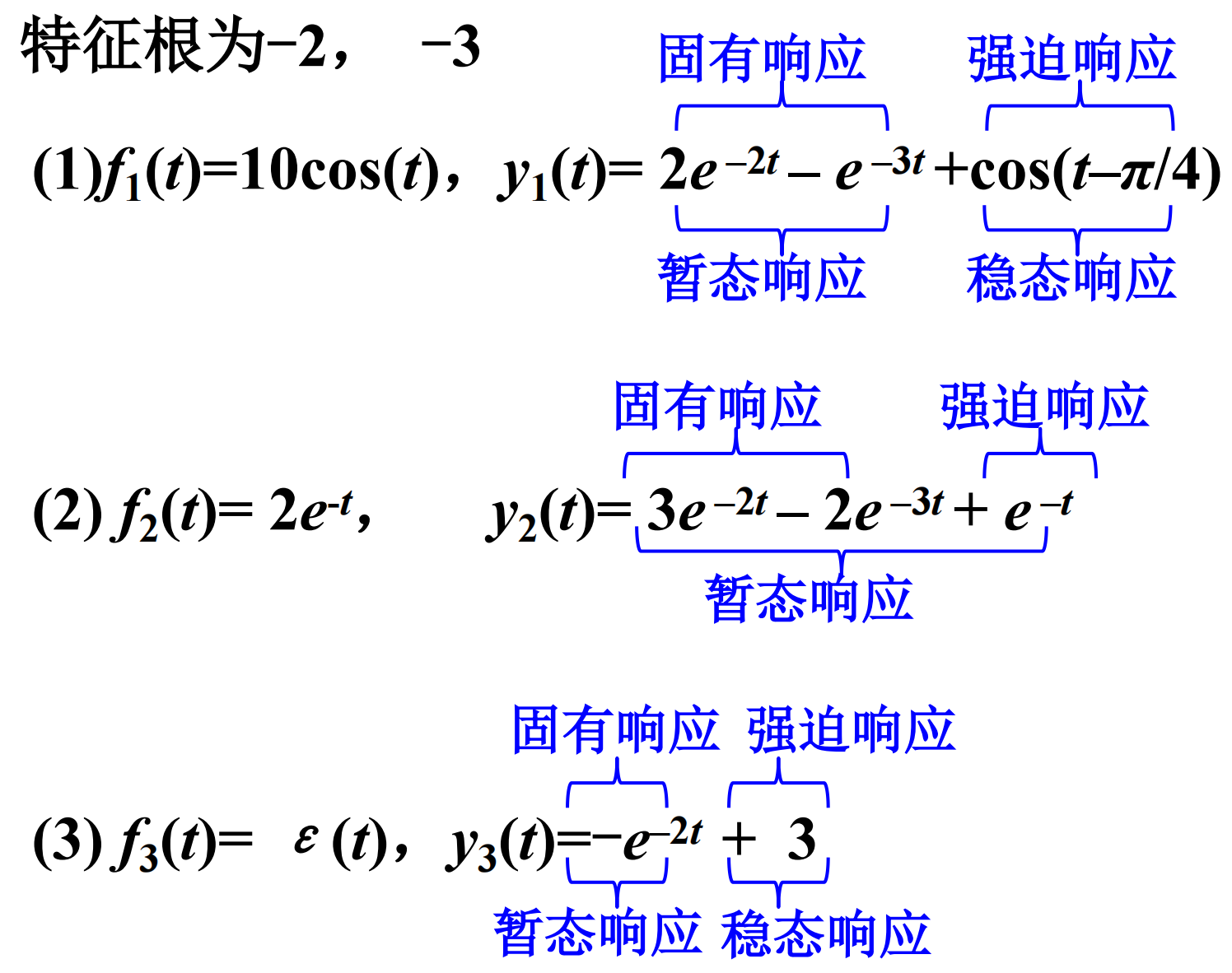
齐次解
常称为系统的
固有响应或自由响应
。
特解
的函数形式与激励的函数形式有关,常称为
强
迫响应
。
t趋于正无穷:
暂态响应
是指响应中暂时出现的分量,随着时间的
增长,它将消失。
稳态响应
是稳定的分量,若存在,通常表现为阶跃
函数和周期函数
例:
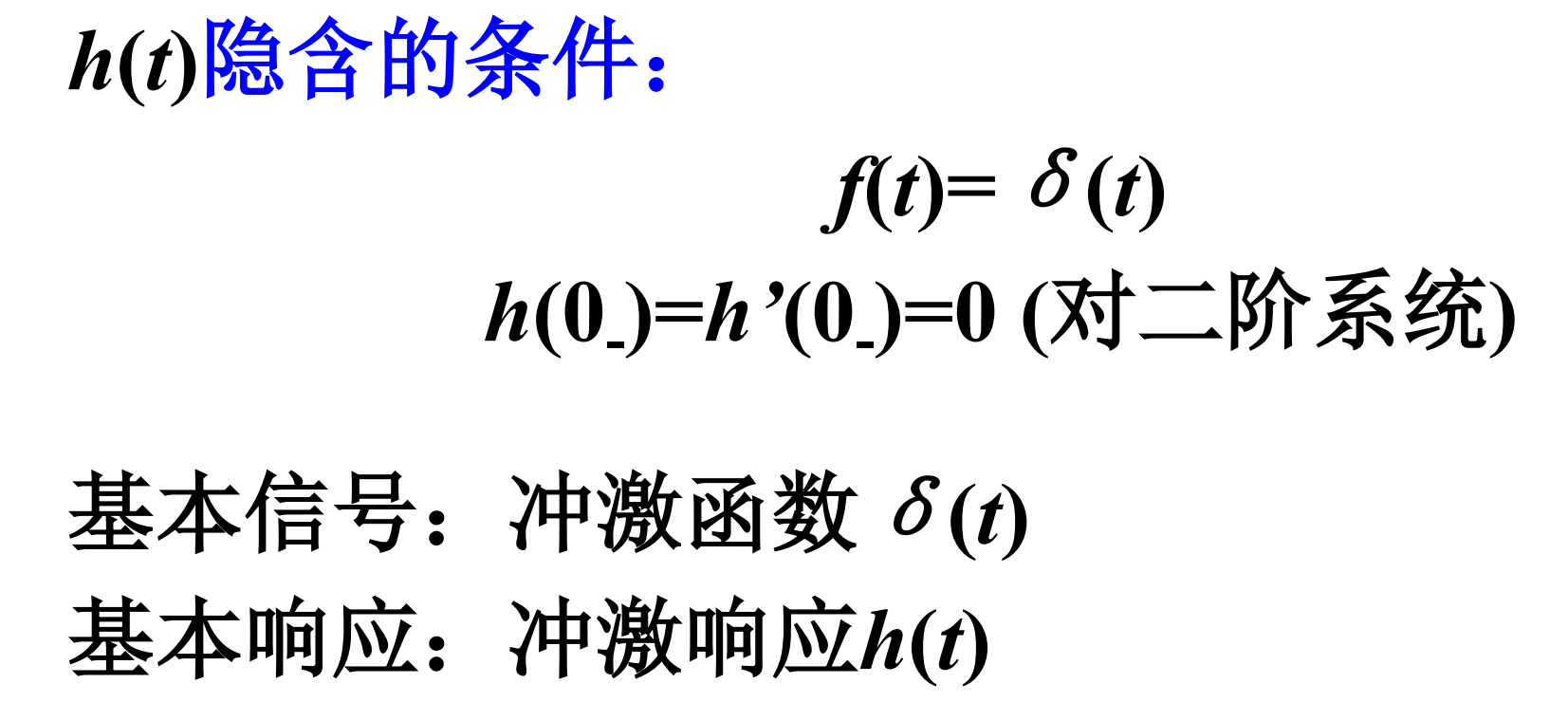
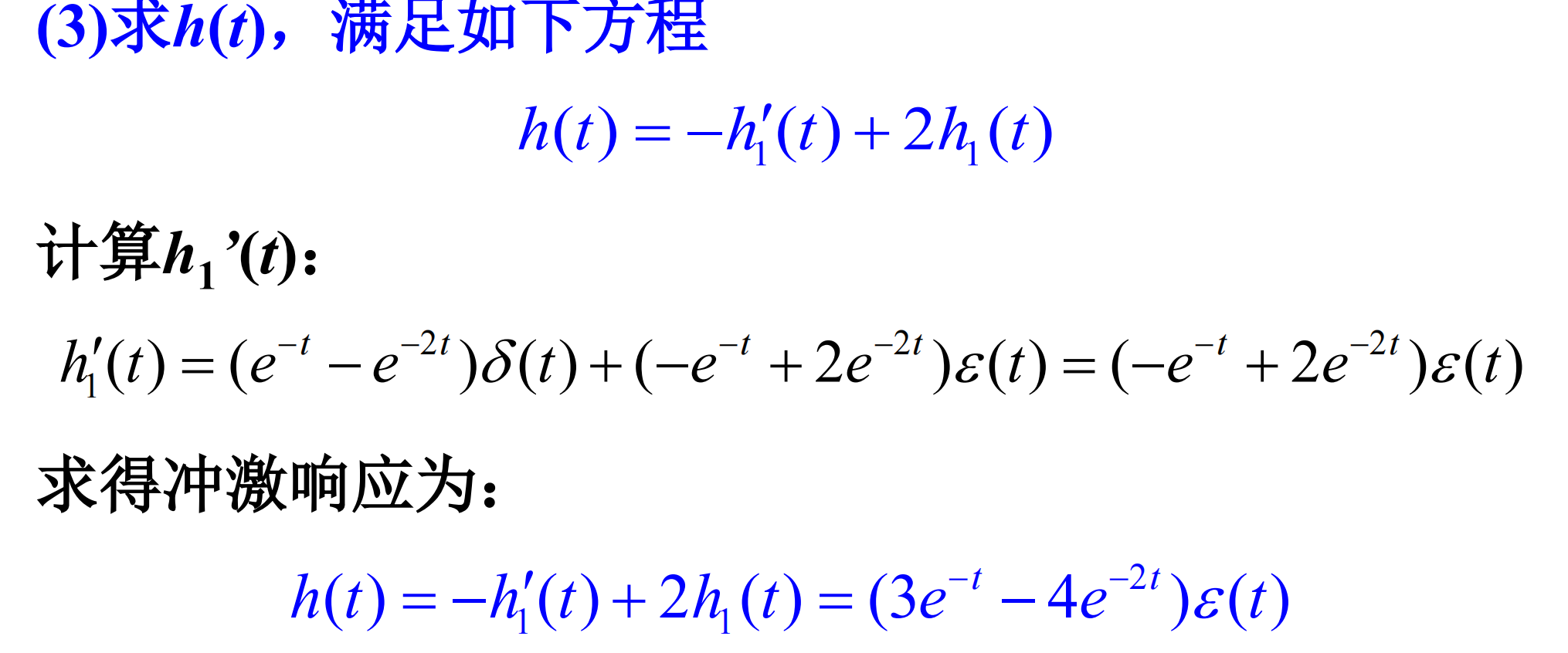
4.冲激响应
冲激响应
是由单位冲激函数
δ
(
t
)
所引起的
零状态响应
,记为
h
(
t
)
。
由于是零状态响应,0-取值为0
即为
如何求解:
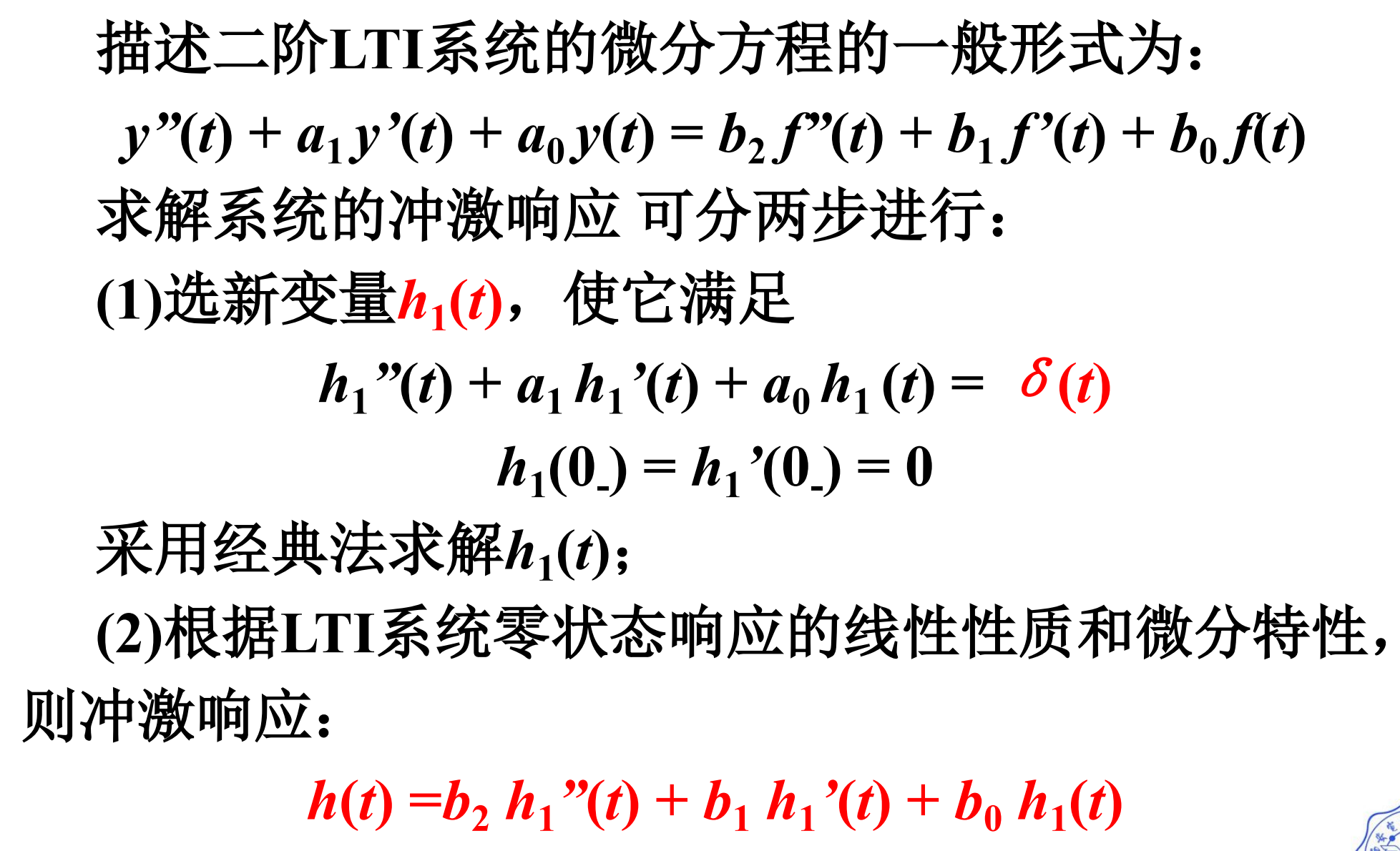
即,根据LTI系统零状态响应的线性性质和微分,输入与输出保持前述关系。
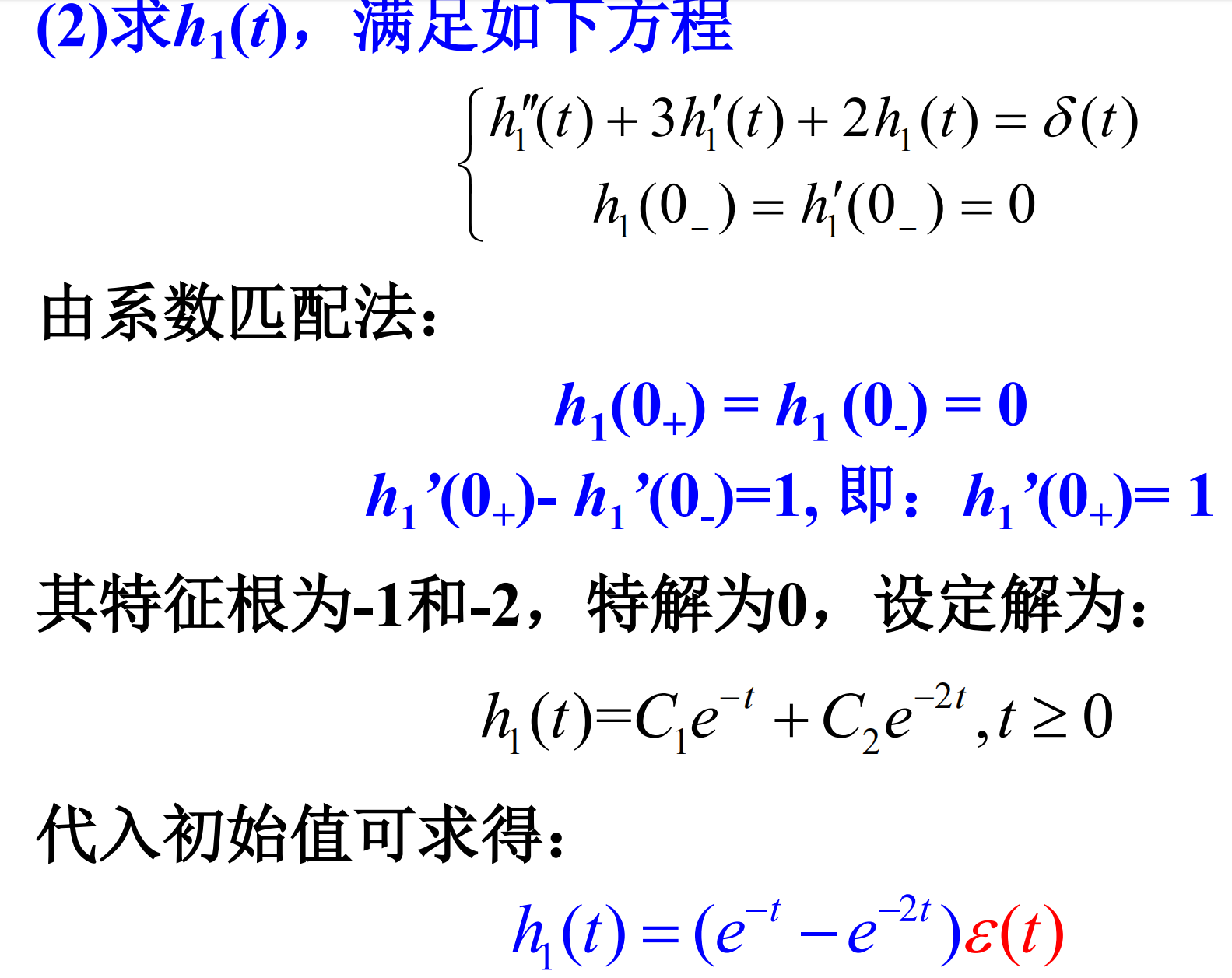
例:

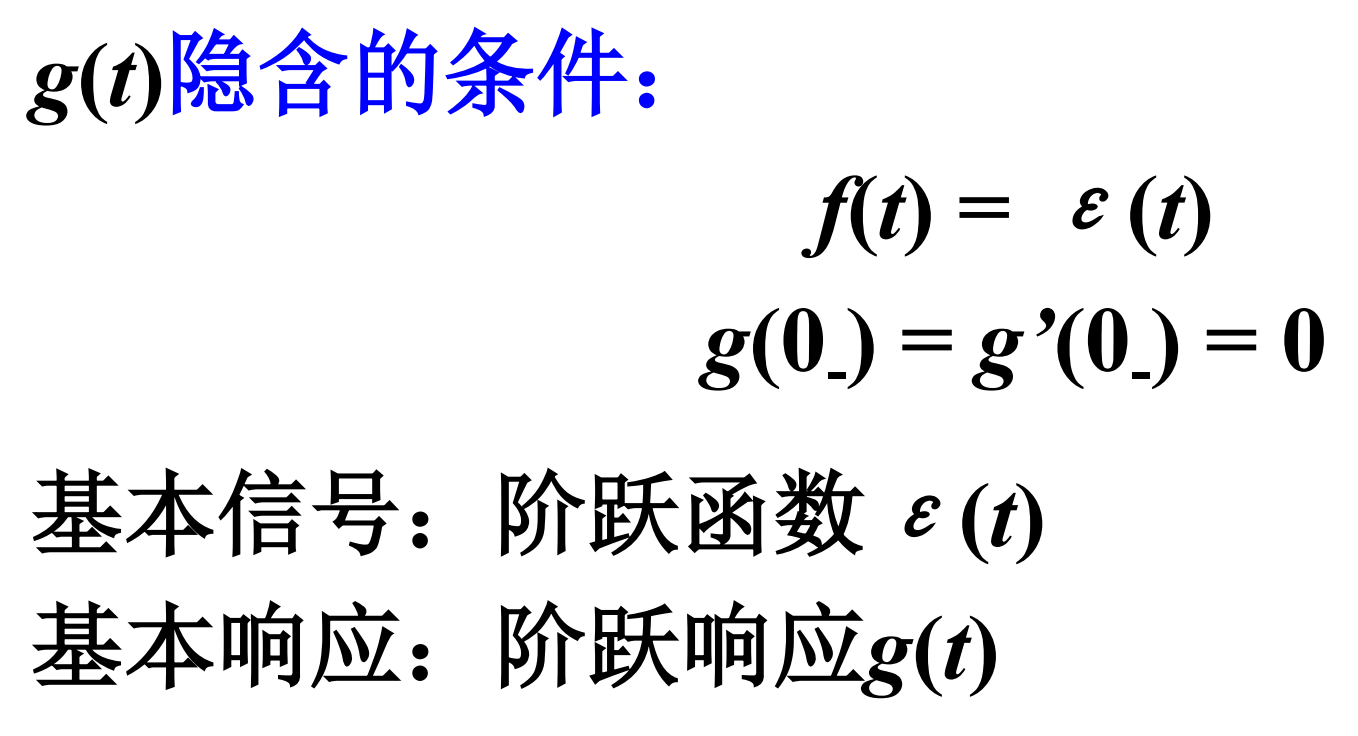
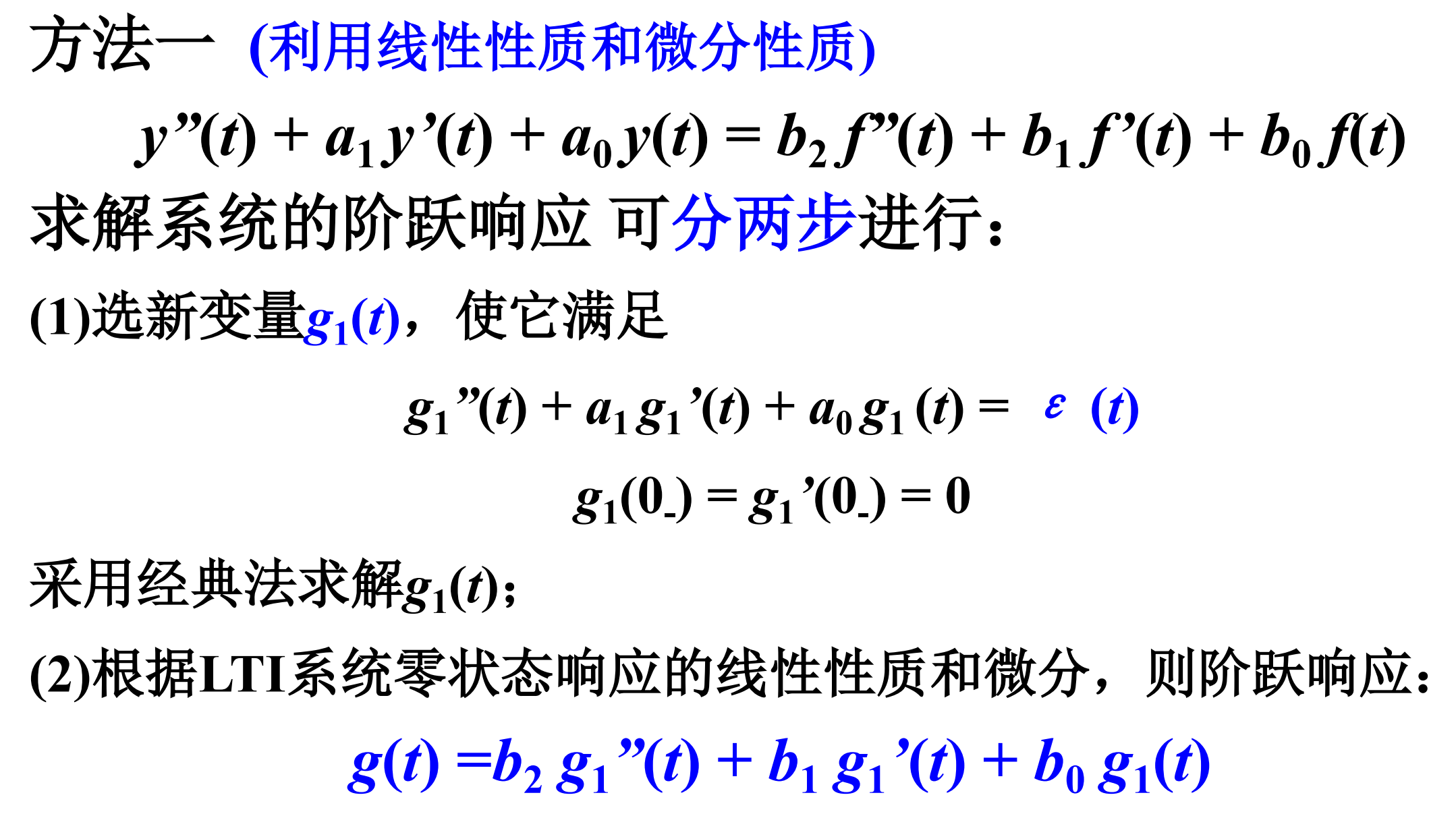
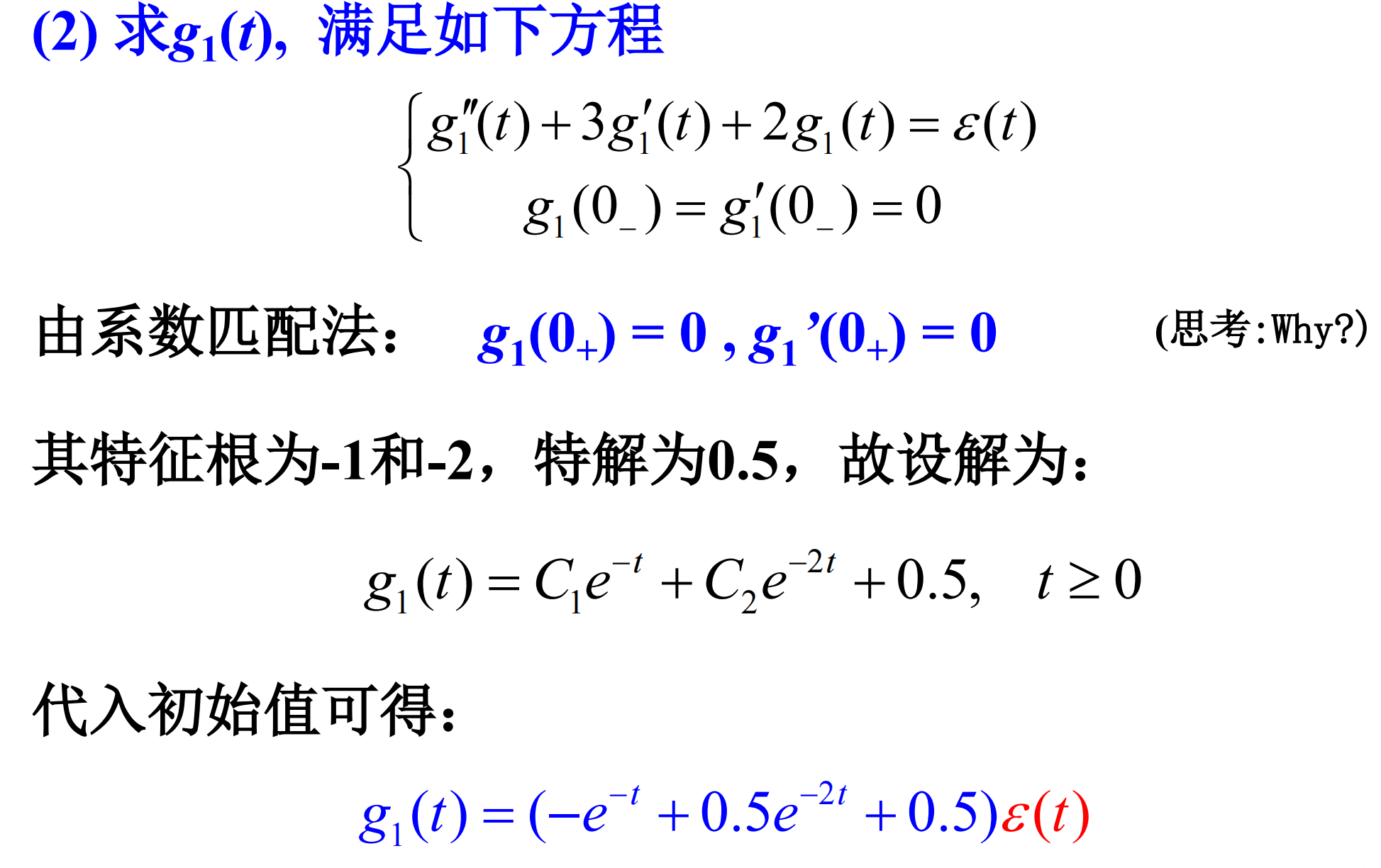
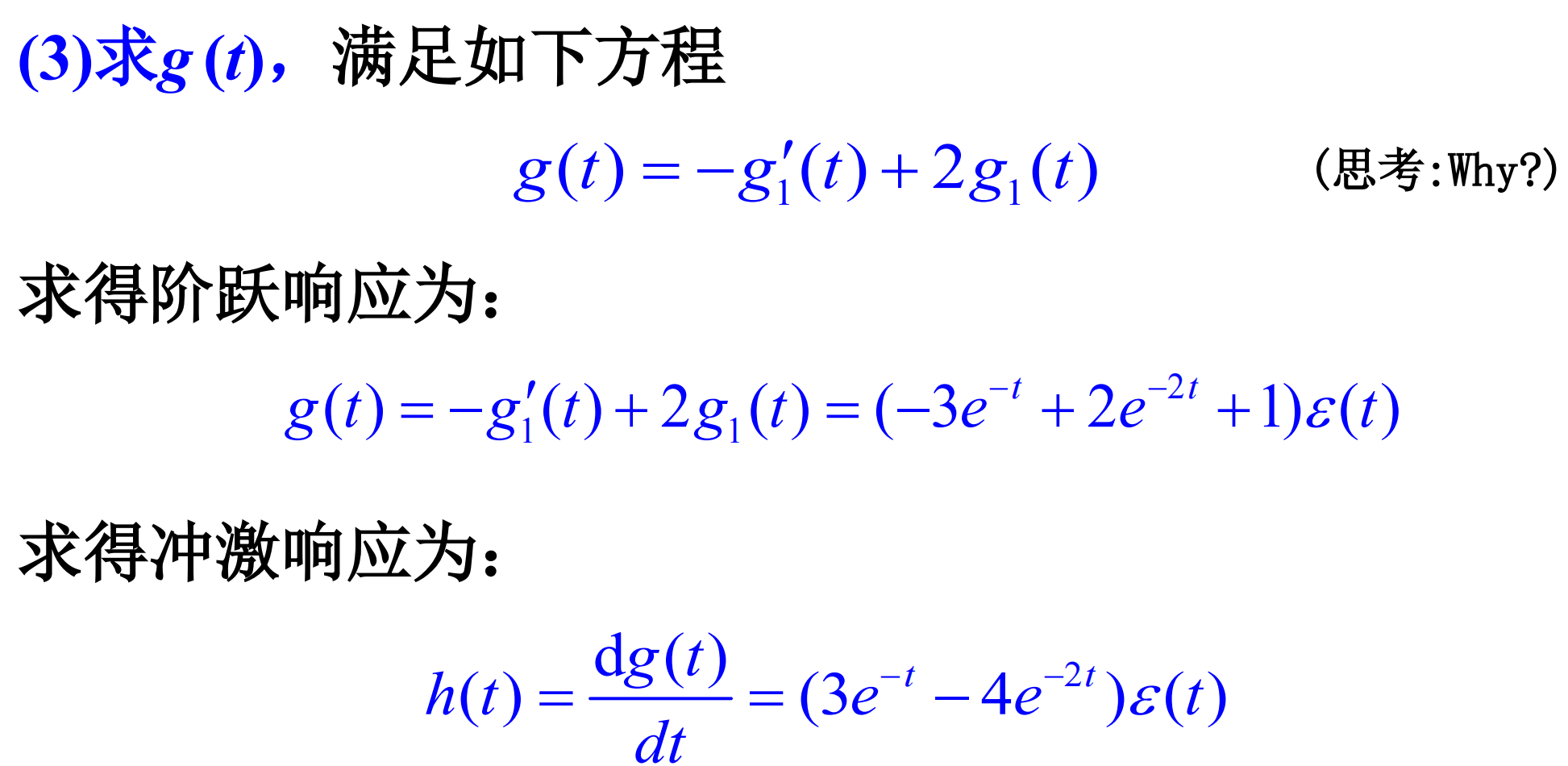
5.阶跃响应
阶跃响应
是由单位阶跃函数
ε
(
t
)
所引起的
零状态响应
,记为
g
(
t
)
。

至此是微分方程的求解
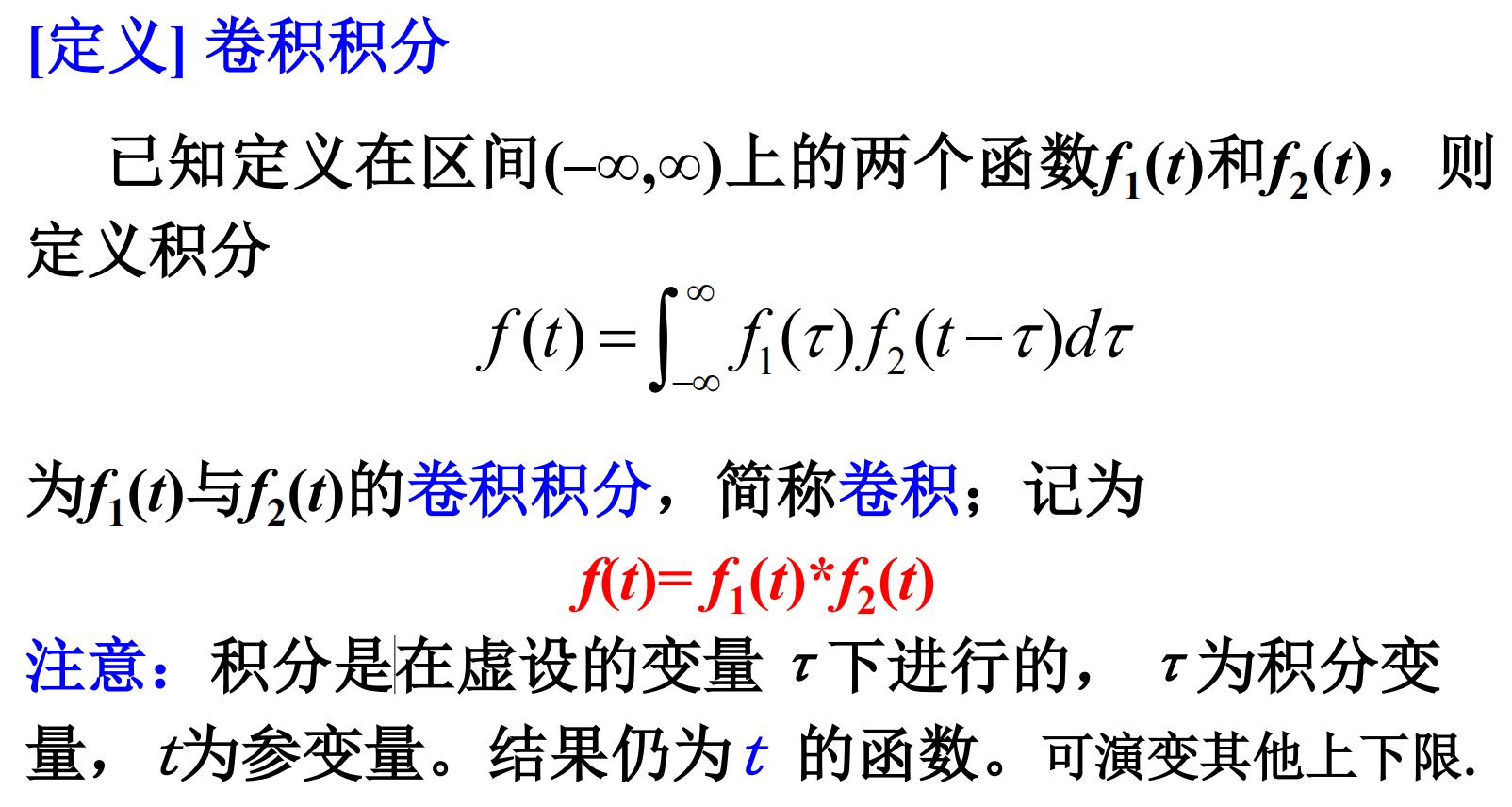
5.卷积积分
5.1 定义
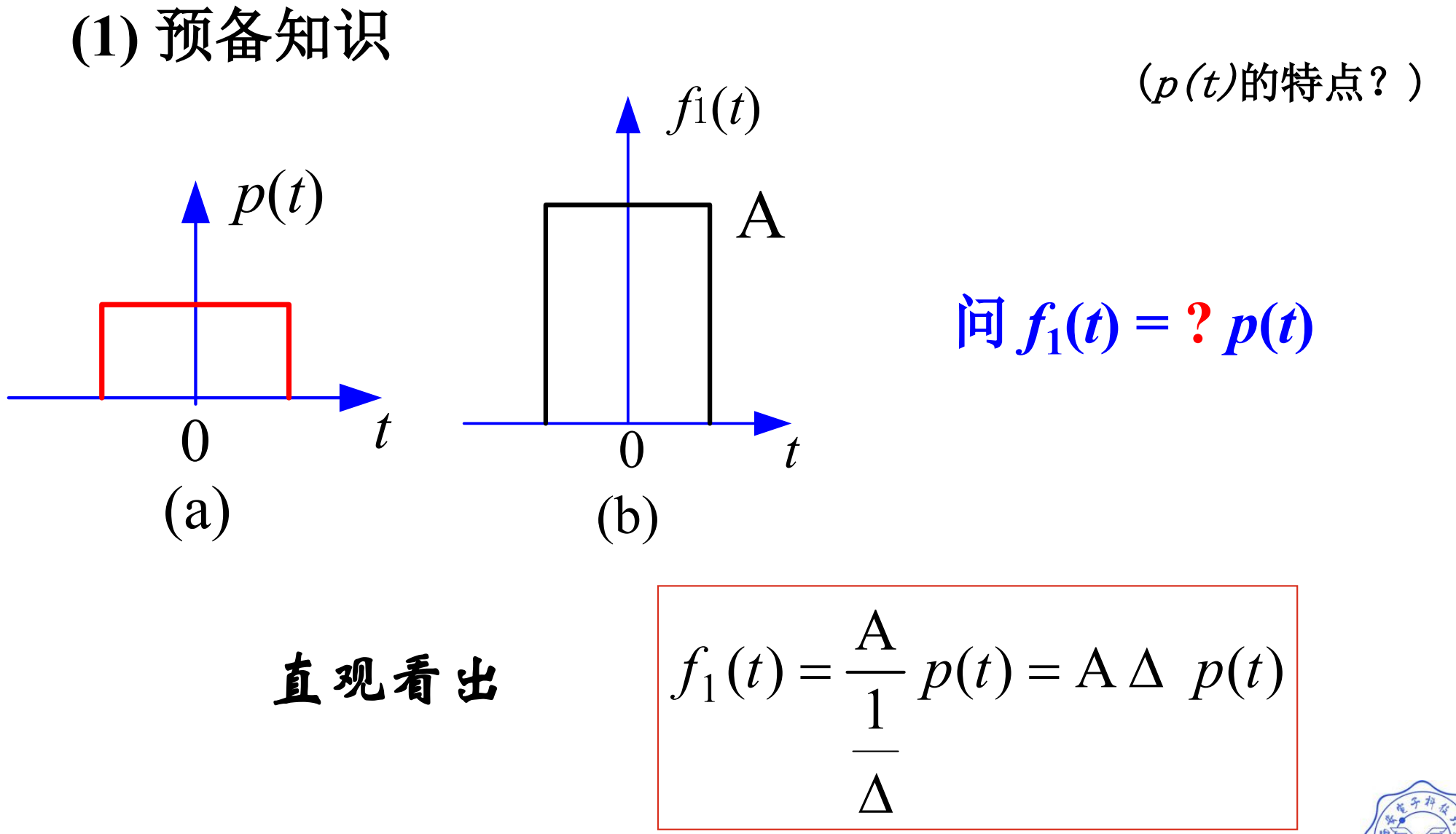
类似定积分的定义:f(t)可以用上述的函数来近似表示
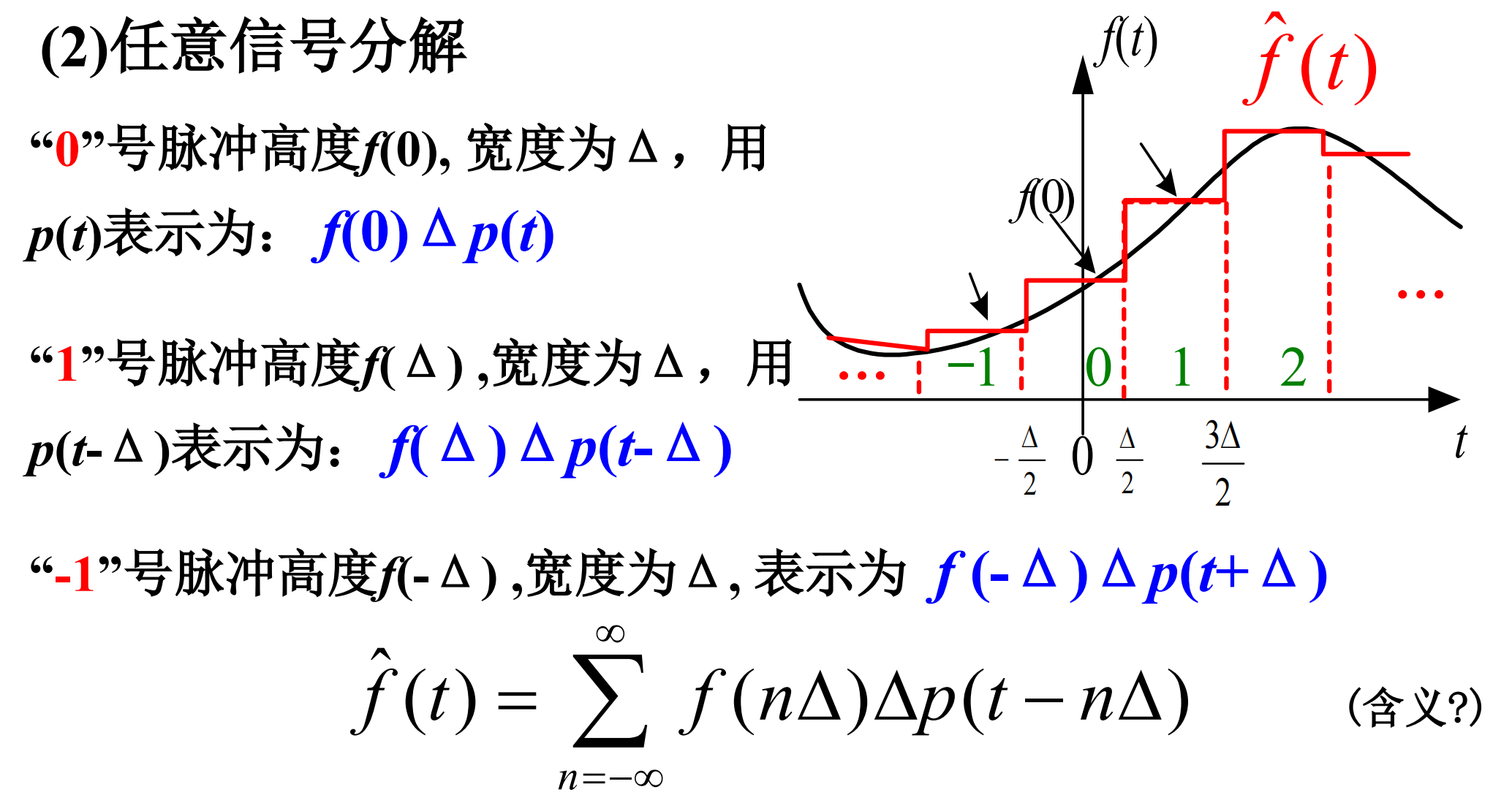
当delta趋近于0,原来的矩形便趋近于一条细线,高为函数值,宽为无穷小,即为:

此即为卷积积分,即为f(t)可以分解以函数值为强度的若干个冲激函数之和,相当于以极密的间隔切面包。
由此得到一个结论:任意函数和冲激函数卷积等于他自身
5.2 卷积积分的线性时不变系统的零状态响应
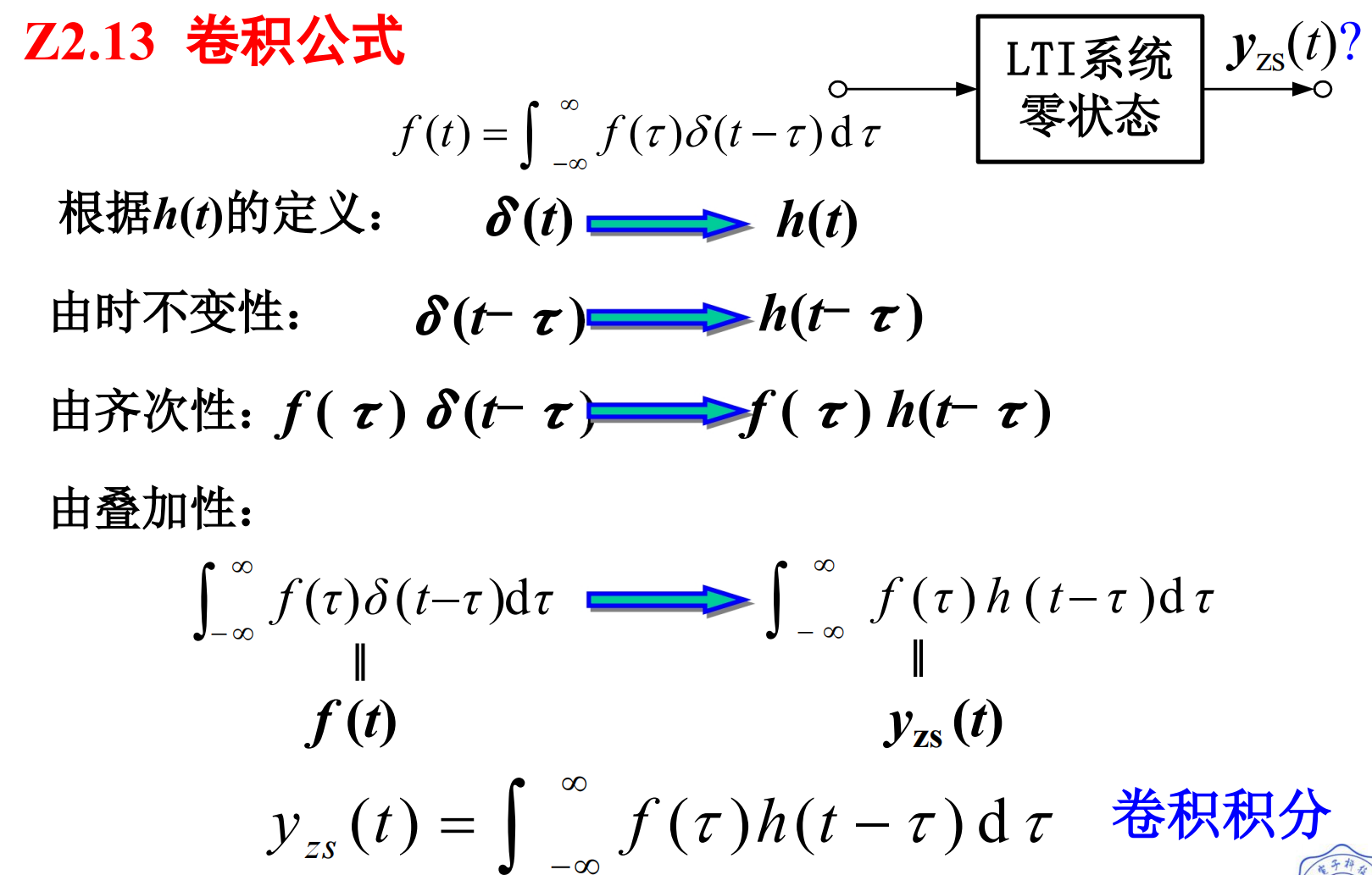
即为:

5.3 卷积积分的表达式
最终仍为一个函数,以t为自变量,同时根据卷积函数的不同,可更改积分的范围。
如下:变了个上限,把阶跃函数提出去了
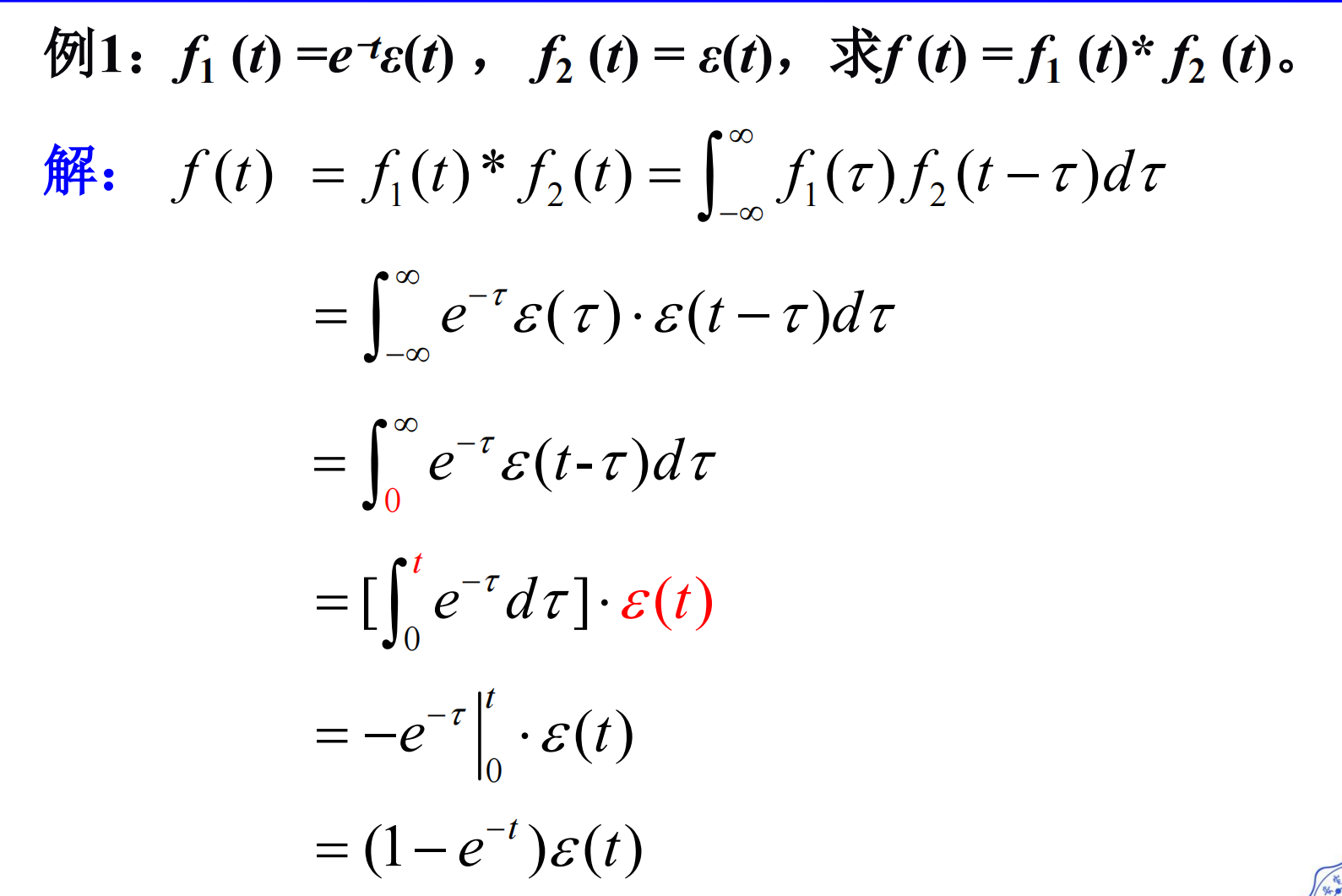
由于f1(t)一个乘积项为阶跃函数,在小于0的范围内为0,故取0到正无穷,再由第二项不能小于0,所以tao不能比t大,所以最终范围为0到t。
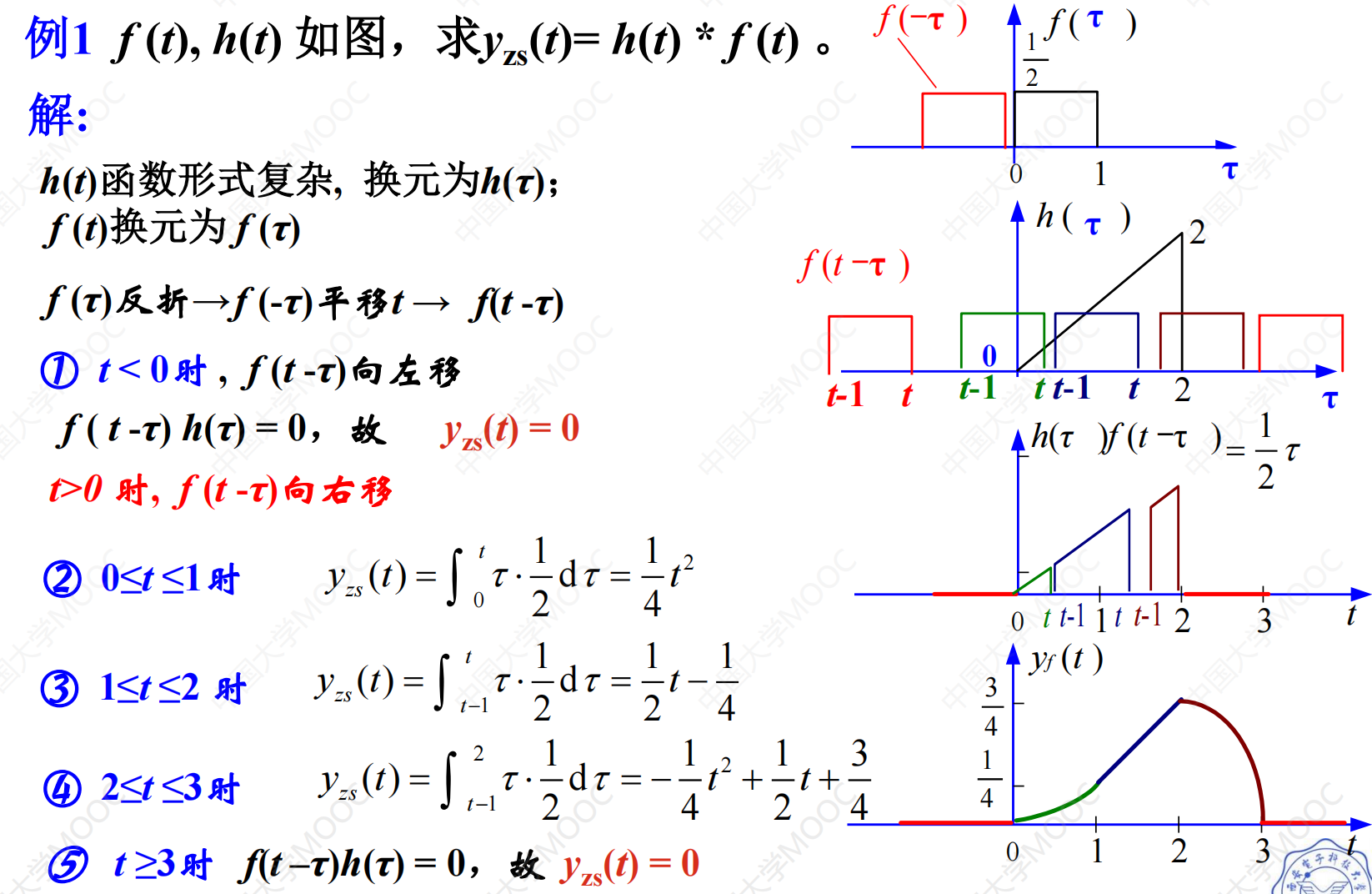
5.4 卷积积分的图解法
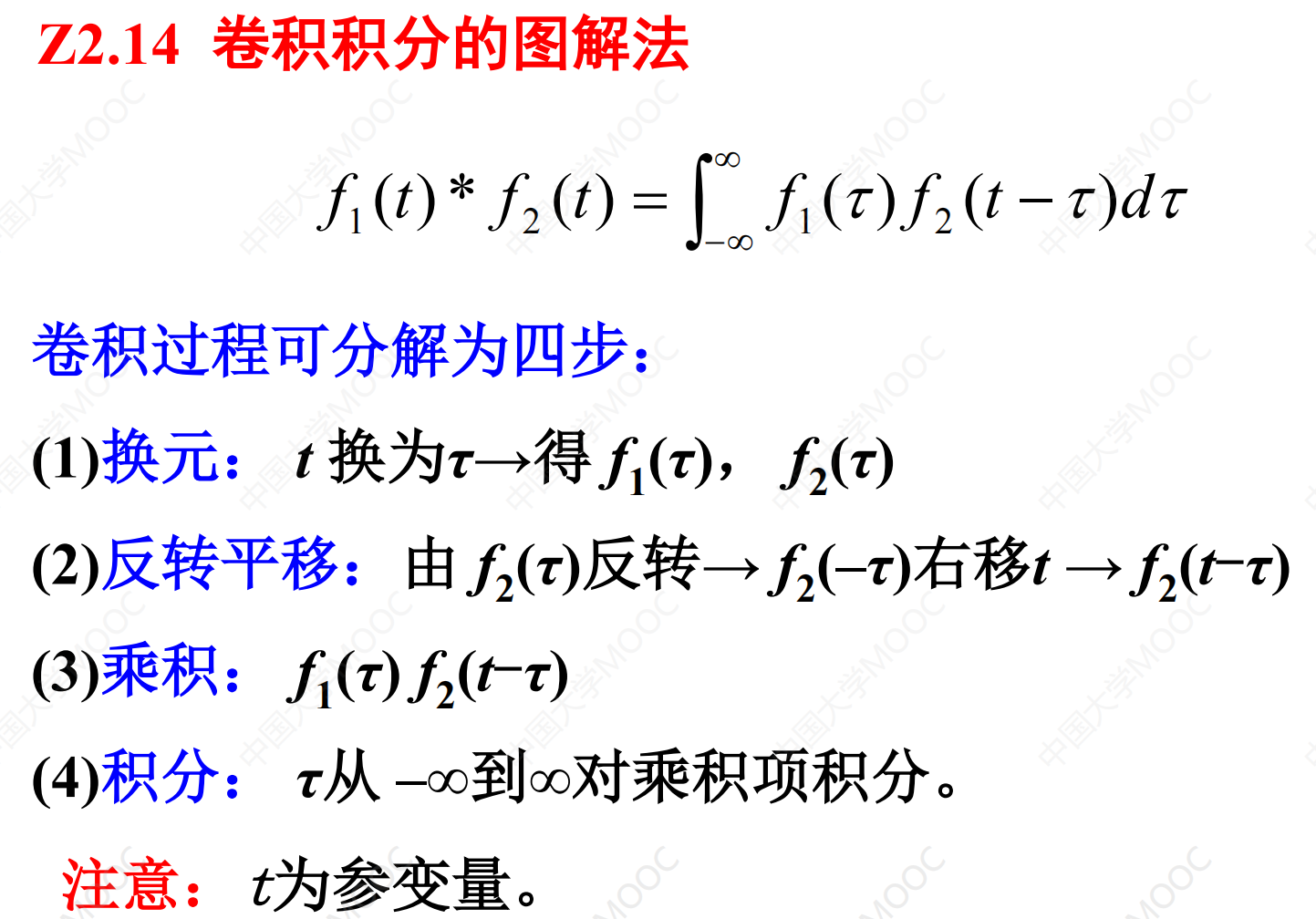
卷积我的理解:判断两个函数的相似程度,一个函数移位判断和另一个函数的相似程度
类似于概率论中求概率密度函数
如下:应该是tao的移动,而不是-tao,所以t<0时是向左移动。
5.5 卷积积分性质
(1)三律
(2)冲激函数,这里奇异函数特指冲激函数

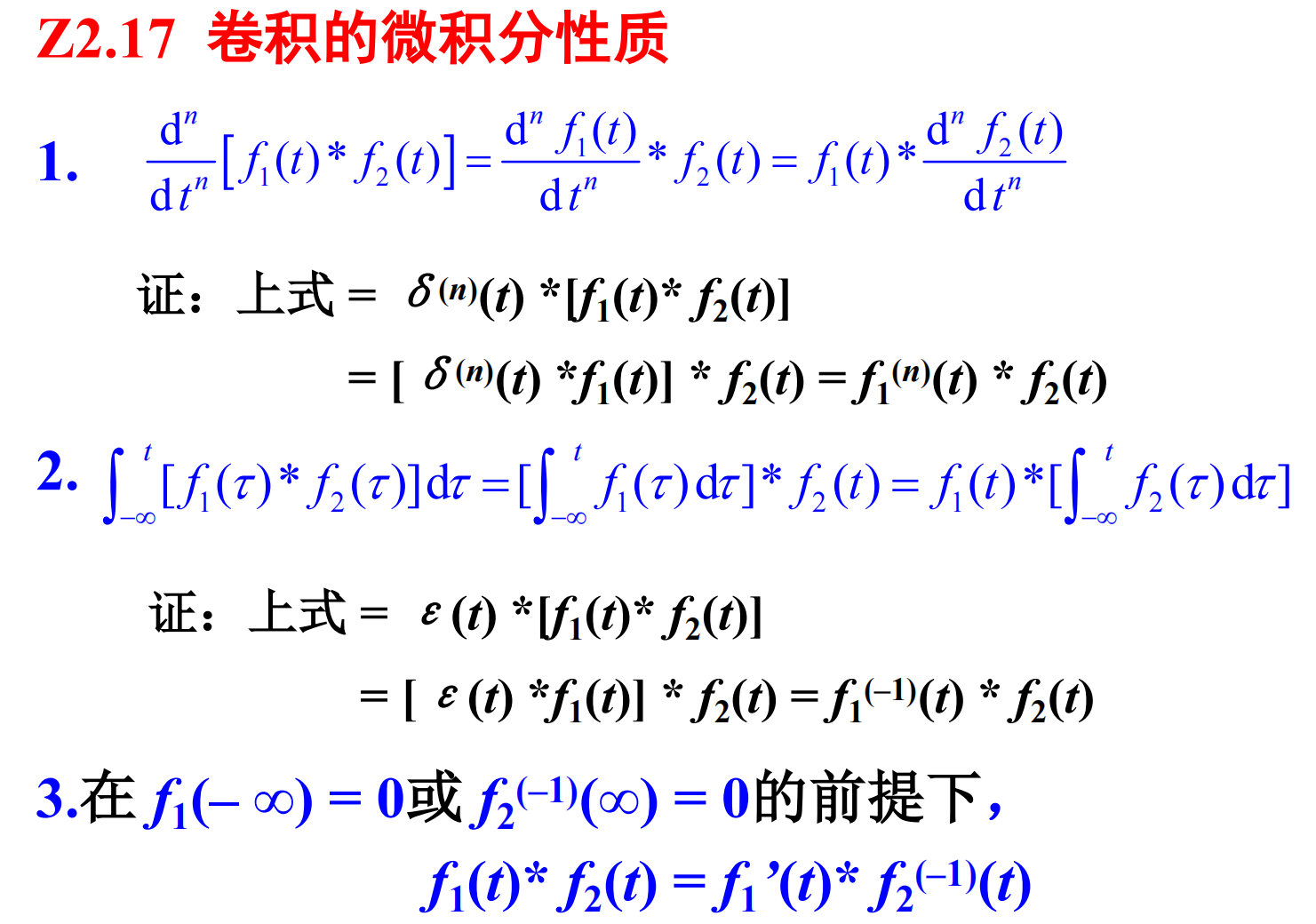
(3)微积分性质
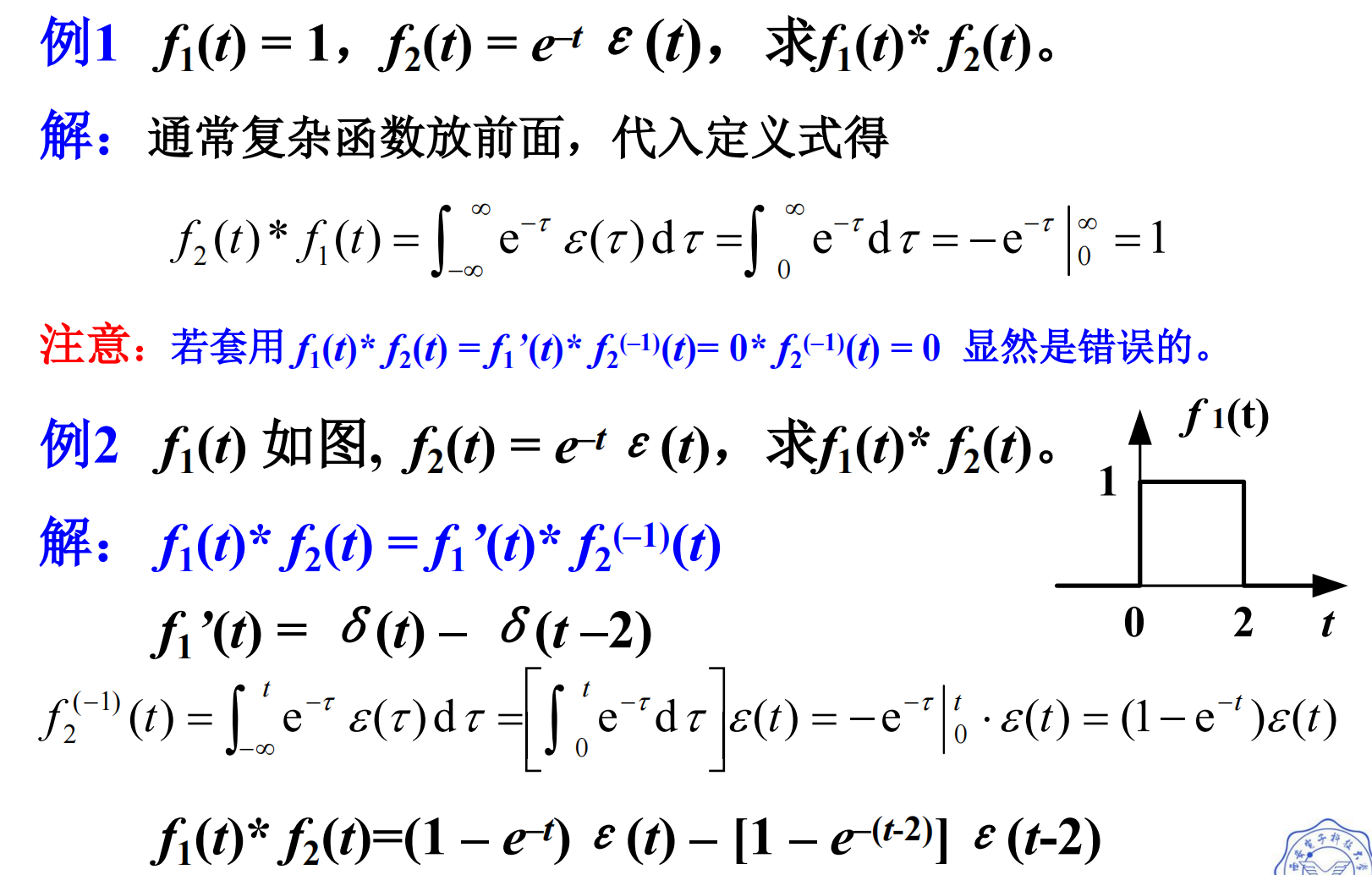
例:
(4)时移性质:
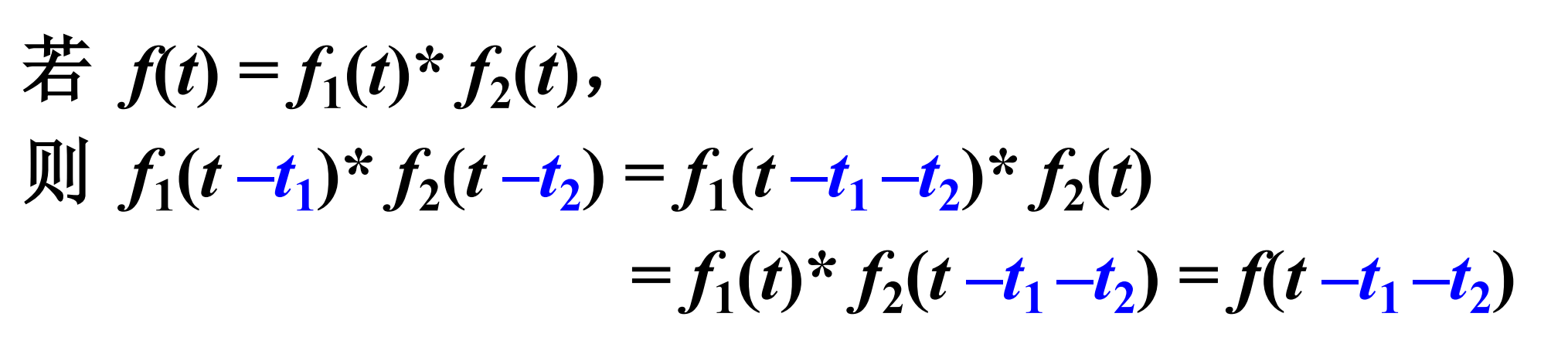
例题:(根据上面的定义,
任意函数和冲激函数卷积等于他自身)
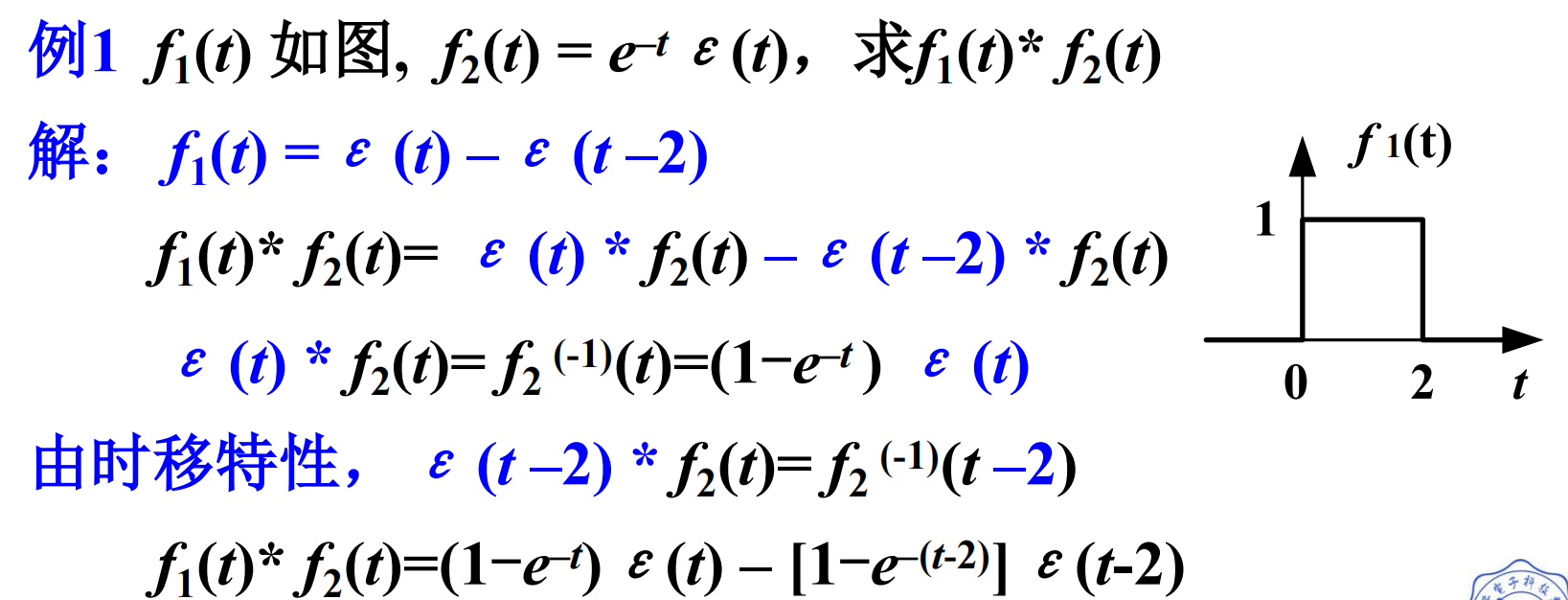
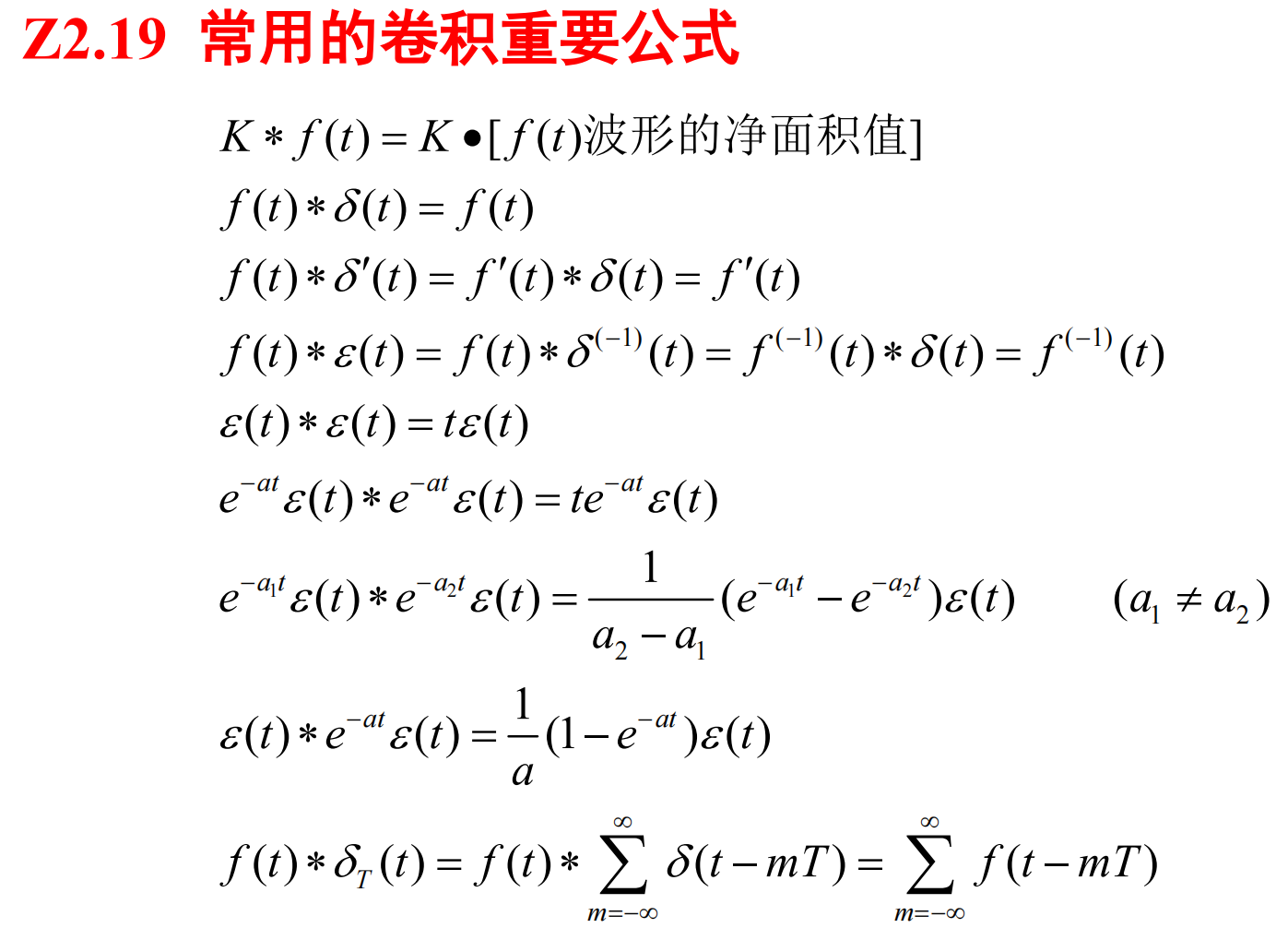
(5)重要公式
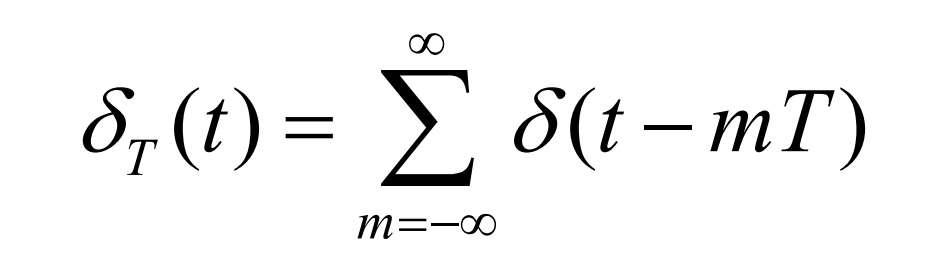
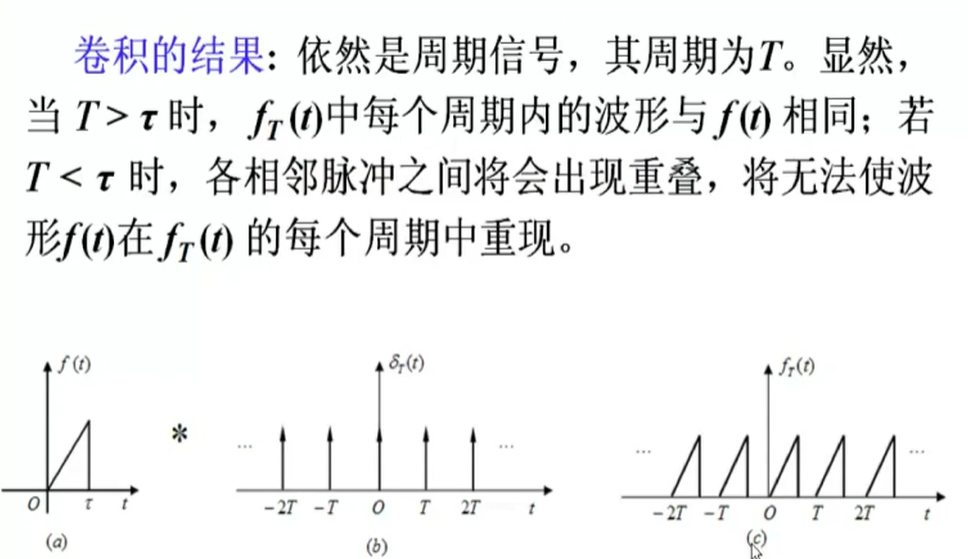
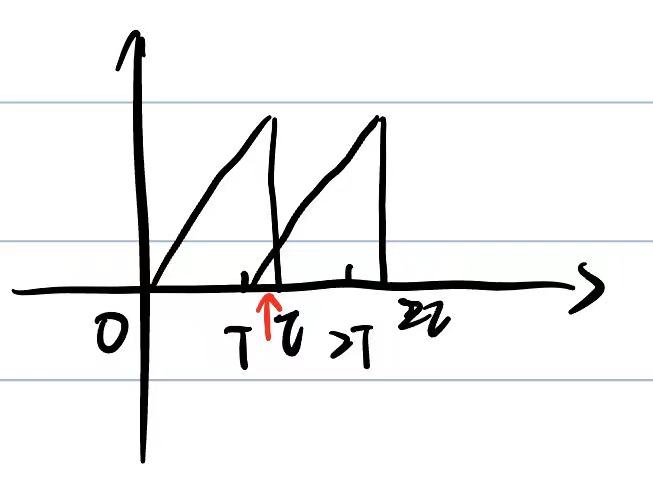
5.6 用梳状(comb)函数卷积产生周期信号


对每一个T点会产生一个f函数,若tao<T,即小于采样间隔,那么一个完整的f函数就会保留下来,如果tao>T,那么前一个T产生的f函数和后一个产生的f函数就会发生混叠。
5.7 自相关函数和互相关函数
为了比较某一个信号和另一个信号的相似程度,对于能量有限的信号:自相关只需要换成两个相同的函数。具体参考:
https://blog.csdn.net/SanyHo/article/details/107101199 https://blog.csdn.net/SanyHo/article/details/107101199
https://blog.csdn.net/SanyHo/article/details/107101199
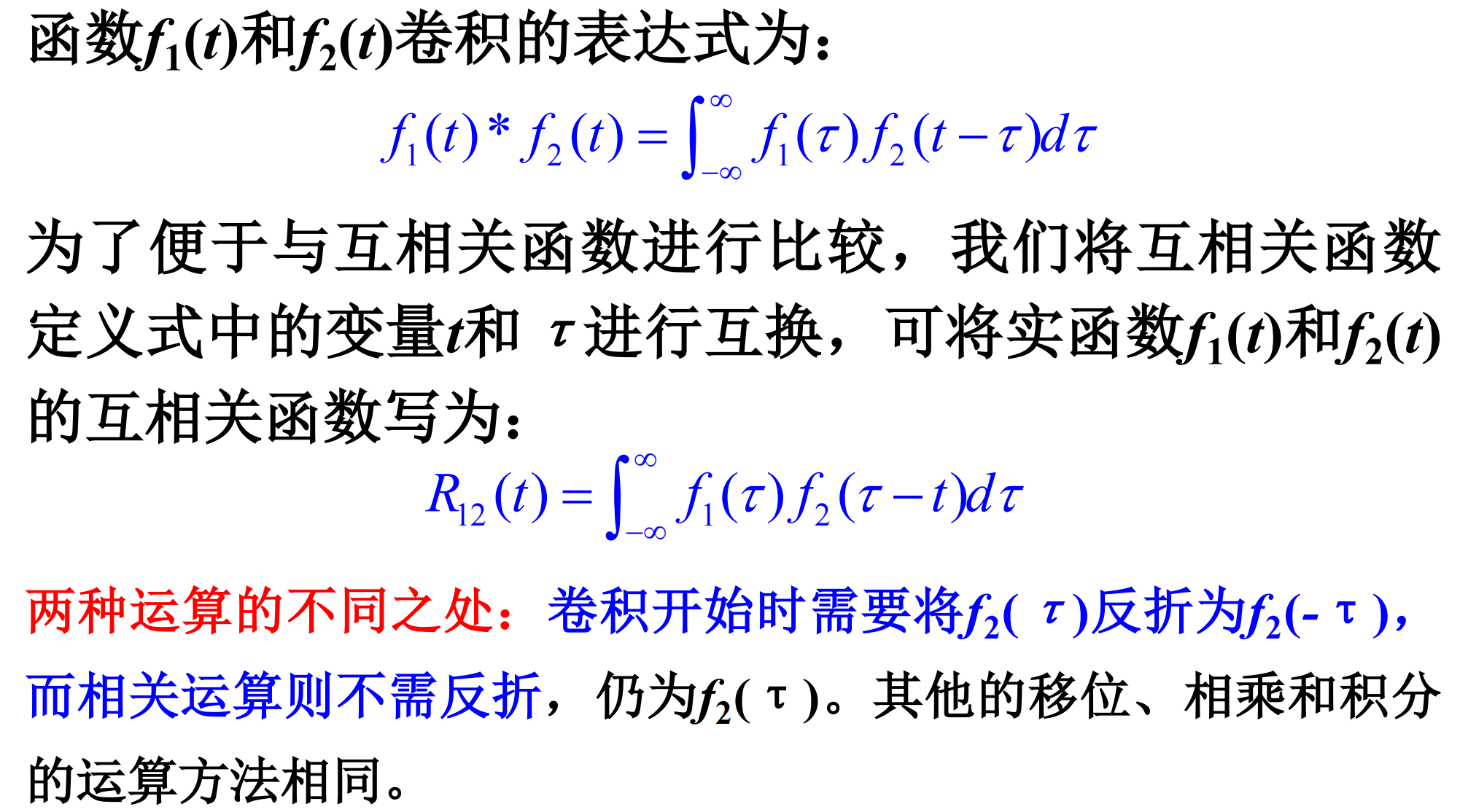
一般,
,
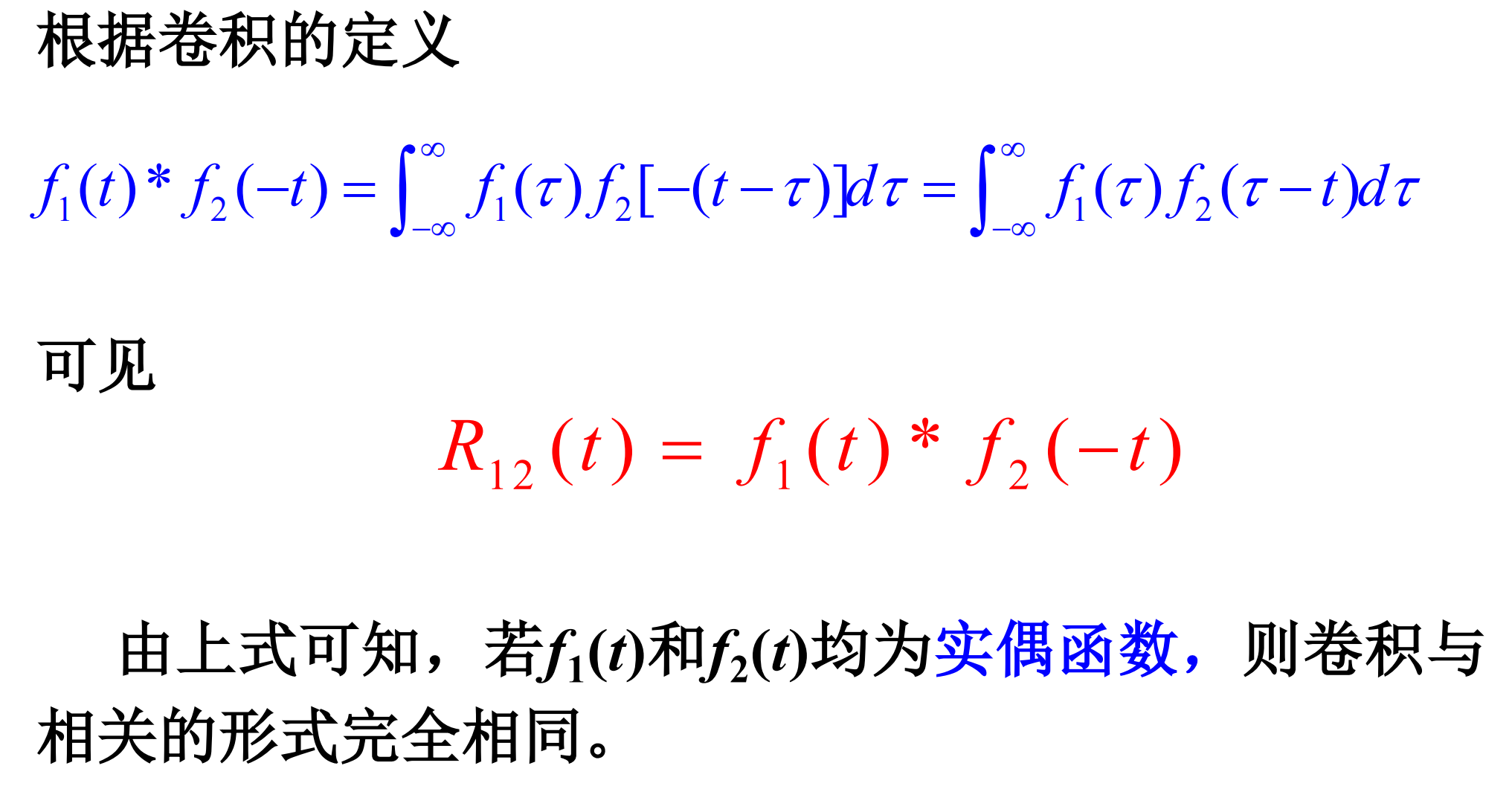
卷积和相关的关系:
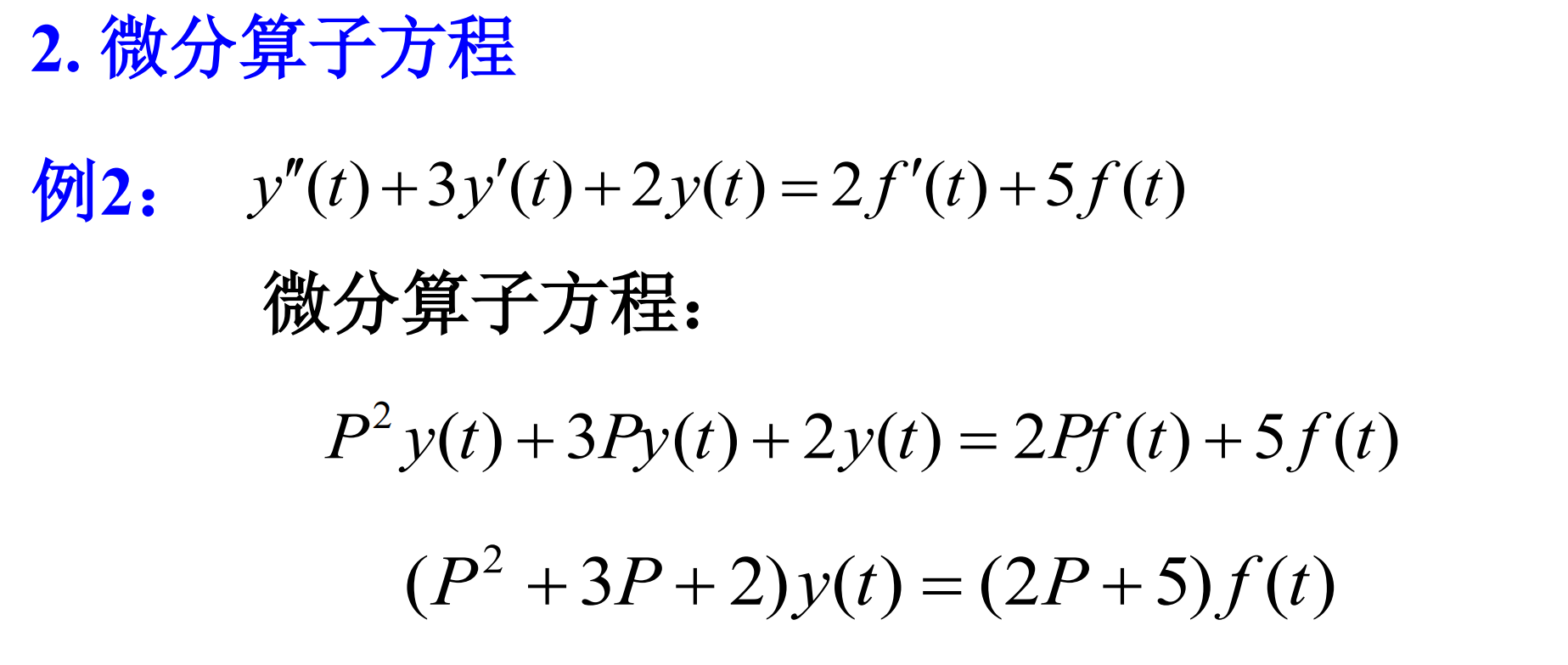
6 利用微分算子求解微分方程
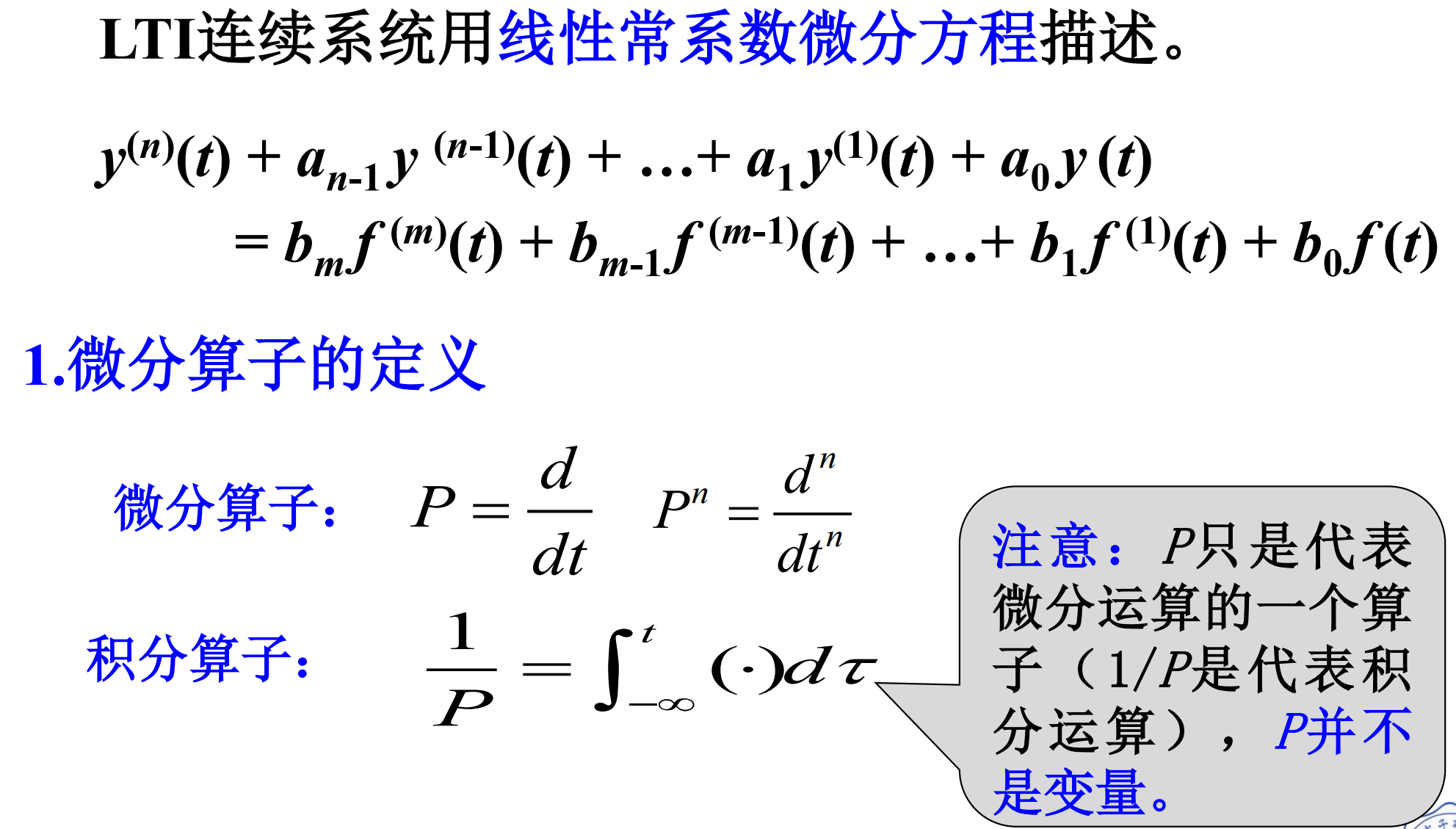
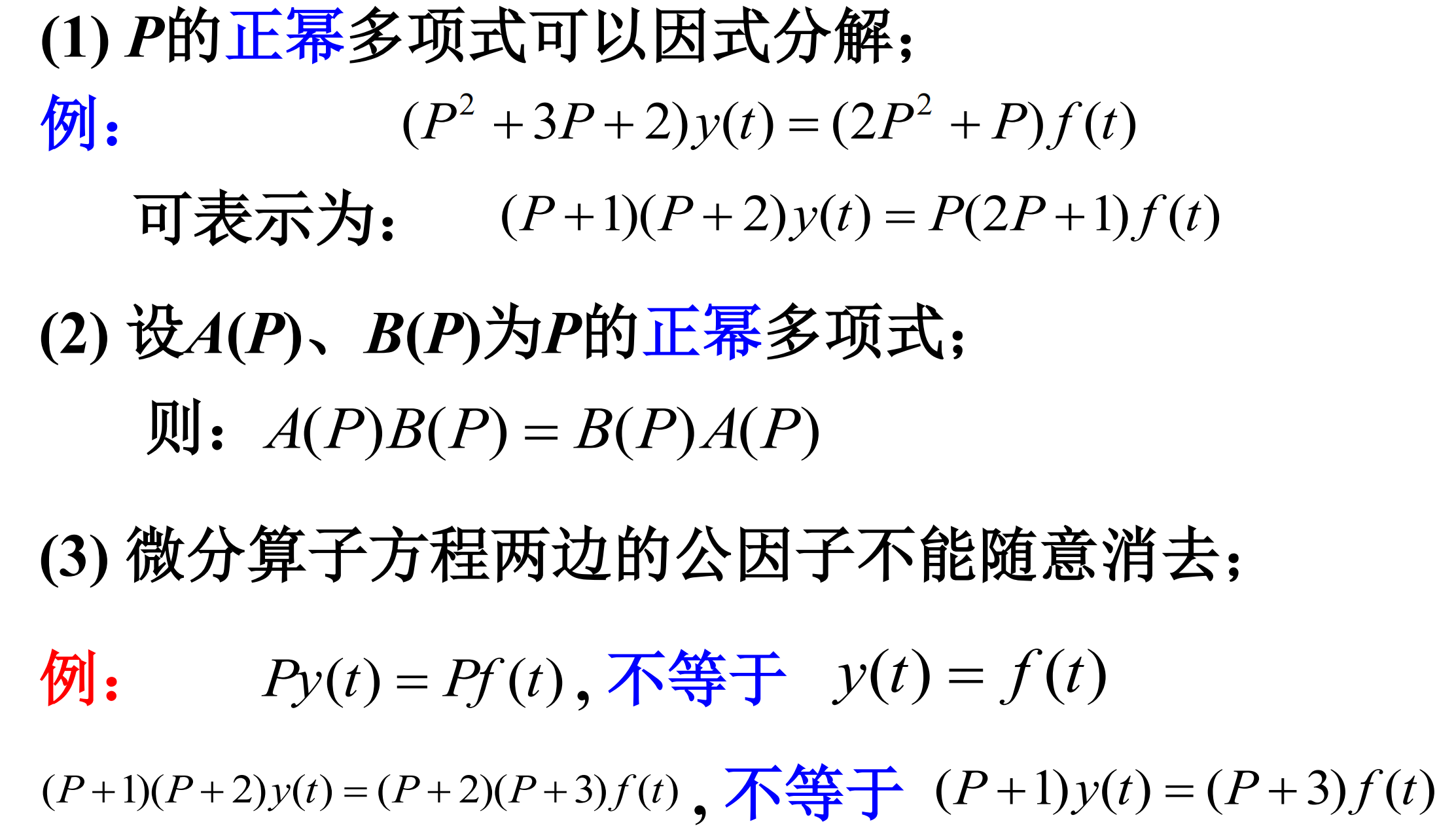
先积分后求导可以约去,因为常数求导为0,而先求导后积分就不可以,因为会引入不定常数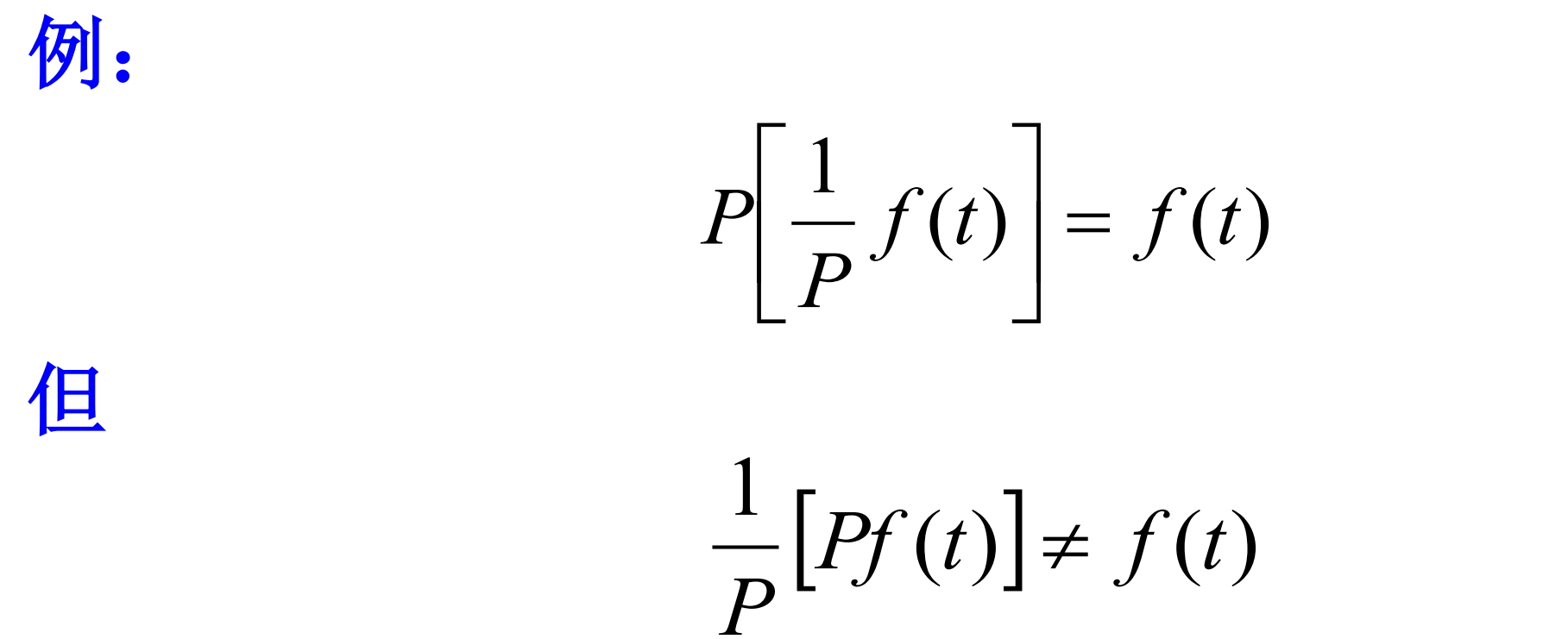















 805
805











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









