






随着太阳能发电技术的快速发展,光伏电站的应用越来越广泛。然而,由于光伏电站通常建立在野外,长期暴露在自然环境下,积累的灰尘和污垢会降低太阳能电池板的发电效率。
如果采取人工清洗则无法避免人员踩踏屋顶及高空作业风险;如果采取常规的机器人清洗则一旦光伏电站的组件出现高低落差或倾斜安装等情况,机器人在行走过程中会产生无法正常归位等状况。
为此,开发一种高效的光伏智能清扫机器人来清洁电池板,已经成为了一种必要的需求。
一、设备简介
光伏智能清扫机器人是一种高效、环保的太阳能光伏电站清洁设备。

传统的电控系统采用 PC+单片机+逻辑控制芯片+步进电机等控制方案,这样不仅布线繁琐、空间占用大,而且整个控制流程也十分复杂,大大增加了开发周期。
而一体化伺服电机的应用,为机器人的运动提供了强大的动力支持,其占用空间小、高精确、高响应、总线控制、接线简单、丰富的报警功能、成本更低,进一步提高了清扫机器人的性能和效率。
一体化伺服电机是一种集成式的电机,其由伺服电机、驱动器、控制器、编码器及制动器等部件组成。这种电机系统具有高效、精准控制等优势,使得机器人具备了更好的性能表现。
(1)一体化伺服电机可以为机器人提供强大的动力支持。光伏电站的清洗通常需要覆盖大面积,而一体化伺服电机可以提供足够的扭矩和速度,使机器人能够快速移动并高效地完成清扫任务。
(2)一体化伺服电机的精准控制可以为机器人的运动提供更好的定位和稳定性。光伏电站的表面通常比较光滑,机器人需要在不同的表面上进行运动,而一体化伺服电机的精准控制可以帮助机器人实现精确的运动轨迹和稳定的运动状态,从而保证清洗的效果和安全性。
(3)一体化伺服电机可以使得机器人更加智能化和自动化。通过与其他传感器和控制器的协作,一体化伺服电机可以实现自主导航、自动避障、智能调度等多种功能,进一步提高了机器人的智能化程度和工作效率。

目前一些电站采用了一种光伏灰水自动清除器的装置,其可以规避人工清洗和常规清扫机器人的诸多弊端,真正做到全自动免运维,但在这种装置中,还存在可以优化升级的地方,以下我们对其来进行升级与改造。
二、解决方案
1.移动清洗作业设计
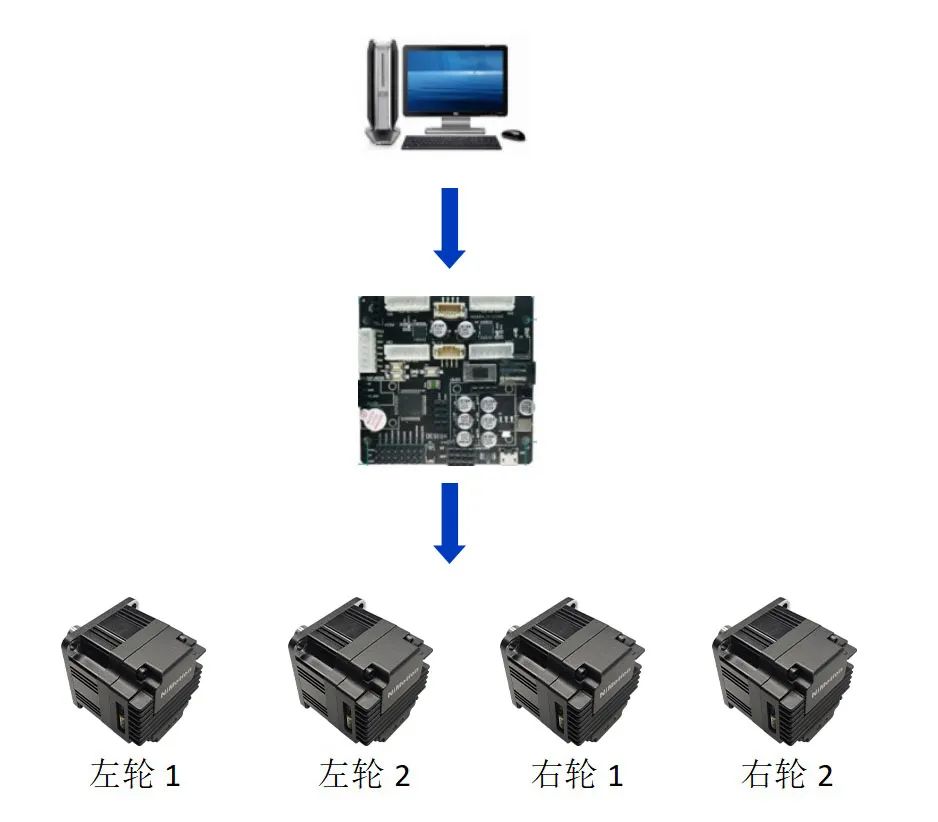
光伏太阳能板清洁机器人的移动机构采用4个一体化短款伺服电机(PMM60-L)控制四个轮,来控制机器的左右移动。清洗作业方式中的滚刷由电机通过联轴器直接连接,实现机器人的回转运动。
2. 气动系统设计
光伏智能清扫机器人停止运行时,自动移动到停止位置,气缸推动停止轴到停止位置,以达到机器锁轴的目的,即使在狂风暴雨中也不会发生任何移动。
3.PLC控制系统设计
随着单片机性价比的不断提高,微处理器芯片及有关元器件价格大幅度降低,单片机的成本也有所下降。因此,本设计的控制系统采用单片机控制,既便捷,又能控制成本。
通过远程启动控制的方式进行移动、清洗、规避障碍及机器状态等信息的实时传递。
三、电机功能
总线控制:支持CANopen/Modbus通信,可灵活对应用户使用的通信协议,缩短系统设计的时间。
原点回归:无需原点传感器,高速完成原点返回;节省配线,可用于无法安装传感器的场合;可手工移动到任意位置设定为原点;支持堵转原点回归;集成多种原点回归算法,可灵活配置。
多种控制模式:支持 PP、 VM、 PV、 PT、 HM、 IP、 CSP、 CSV、 CST 标准模式;支持NiMotion位置模式、NiMotion速度模式、NiMotion力矩模式。
S型加减速曲线:内置12段S型加减速曲线。有效减小冲击量,使电机运行更稳定平滑。
自带I/O接口:本地化的数字量输入输出,让控制器变得更加轻松和简洁可接多种信号类型传感器,如:光电开关、接近传感器、霍尔传感器、脉冲输入等。
完善的报警功能:一体化步进电机上电自检诊断,能及时发现硬件故障,避免影响系统运行搭载多种安全保护功能, 通过 LED 闪烁警报,直观显示电机当前状态,同时具备过压/欠压、过热、过流、堵转报警等保护功能。















 1868
1868











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









