






创建ROS工作空间
mkdir -p (工作空间命名)_ws/src
cd (工作空间命名_ws
catkin_make进入(工作空间命名)下的终端启动code
cd (工作空间命名)
code .在vscode中编译ROS:ctrl+shift+B
修改.vscode/tasks.json文件,把以下文件替换到.vscode/tasks.json文件里面。
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
创建ROS功能包
右击src文件---选择create catkin package
设置包名--回车
python实现
在功能包下创建scripts文件夹:
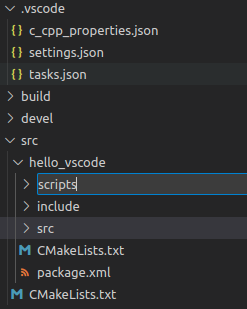
在scripts文件夹下创建.py文件。然后开始写.py代码
然后修改权限,右击scripts,选择在终端中打开,输入:
chmod +x *.py这一步为了 给所有的python文件添加可执行权限
然后修改配置文件
ctrl+shift+B编译
一号终端:roscore 二号终端:source ./devel/setup.bash rosrun (.py所在文件夹) .py
注:python配置的意义
python配置修改:在CMakelist.txt中取消以下几行注释:
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
其中 scripts/自定义文件名.py写自己的文件名和.py名
意义:1.可以正确的安装python文件脚本
2.定位到合适的python解释器去执行.py
注意:不配置会显示异常
ROS开发常用IDE:http://wiki.ros.org/IDEs
















 1916
1916











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









