






 本文探讨了复矢量PI电流环在高速和低载波比条件下的优势,特别是在动态过程中的解耦性能。它通过零极点对消减少d-q回路耦合,与传统PI控制器相比,即使在参数失配情况下也能提供更稳定的电流控制。
本文探讨了复矢量PI电流环在高速和低载波比条件下的优势,特别是在动态过程中的解耦性能。它通过零极点对消减少d-q回路耦合,与传统PI控制器相比,即使在参数失配情况下也能提供更稳定的电流控制。
1.简介
之前一直就听说复矢量PI电流环的性能很好,特别是在高速时或者说是在低载波比的时候,能够达到比较高的电流环带宽。
或者说,电感和数字控制延迟的影响使得两控制回路之间仍然存在耦合,尤其是在动态过程或高频运行中。复矢量PI电流环能够尽可能减小d-q回路的耦合效应。
关于复矢量PI电流环,知乎上面也已经有大佬画了框图。
 https://zhuanlan.zhihu.com/p/647927060
https://zhuanlan.zhihu.com/p/647927060我就打算做个仿真看看其效果。
参考文献:
这篇英文文献有点久远了,有的图不是很清楚,可以看看这篇硕士论文,把框图画的挺清楚了的。
2.不同PI电流环的介绍
2.1最传统的PI电流环
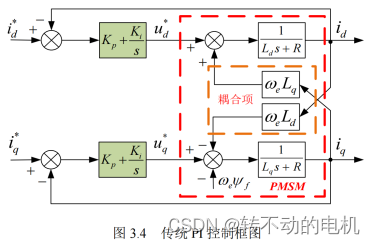
传统的PI电流环如上,只有PI调节器,没有任何补偿,没有考虑延时以及耦合效应,所以性能也是比较差的。但对于一般的应用而言,如果PI调节器参数设置的比较恰当,调节时间足够的时候,单纯PI调节器是能够把这些耦合项以及扰动项抵消掉的。但这当然没办法满足高性能的需求。
2.2基于前馈补偿的PI电流环
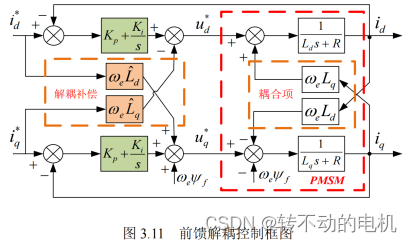
注意到,前馈补偿是利用电流参考值取构建补偿项is*we*Ls,这在动态过程中显然是不合理的,因为电流参考值在动态过程中不一定等于实际电流,所以这样算出来的补偿项数值也是不准确的。所以下文仿真中就不讨论这种控制方式了。
2.3基于状态反馈解耦的PI电流环
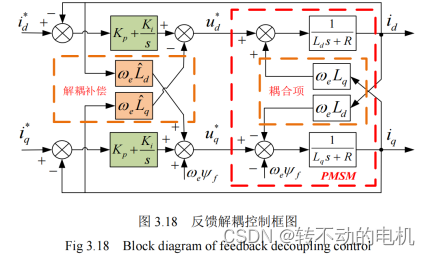
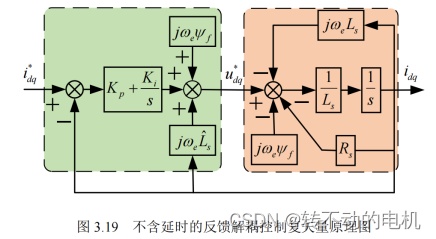
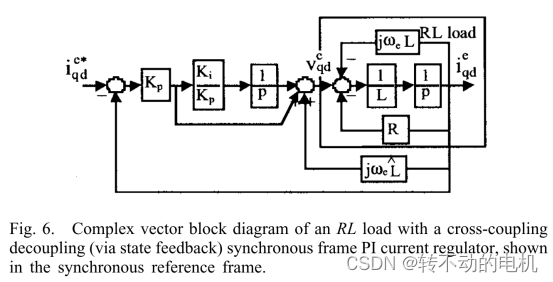
我们可以把图3.18化成复矢量的形式(见图3.19),这和英文文献中画的状态反馈解耦控制的复矢量原理图(见下图Fig.6)是一致的。
这个状态反馈解耦控制,应该就是用的比较多了吧(包括我自己实验中也是用这个模型),反正我当时拿到的第一个模型就是用的这个状态反馈解耦。
2.4基于复矢量解耦的PI电流环
复矢量电流控制器是基于零极点对消的控制器设计原理进行设计的,针对同步旋转 d-q 坐标系下对象存在的复数极点在控制器中引入复数零点与其对消,以期消除电流的动态耦合现象。
在不考虑反电动势we*flux时,电机的传递函数的复矢量形式为:
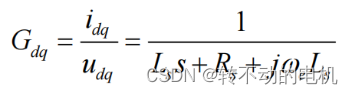
设计的复矢量PI电流环表达式为:

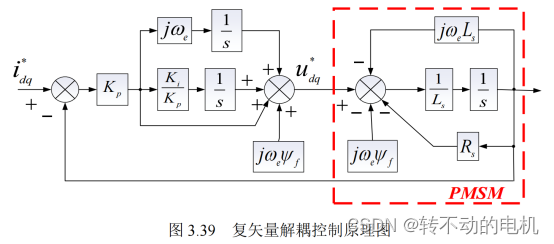
上式中,蓝色方框内表示我们传统的PI电流环,根据零极点对消原则,一般取Kp=wc*Ls,Ki=wc*Rs,wc代表电流环带宽。红色方框代表引入的复数,是为了构造复数零点与传递函数中的复数极点进行零极点对消。
因此可以得到,复矢量解耦控制的框图如下:
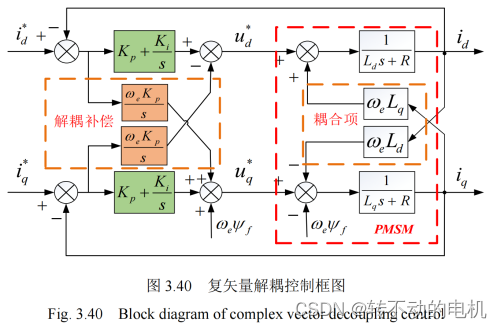
但是复矢量在控制器中是难以实现的,我们要把这个框图转化为标量的形式,那应该怎么转化呢?
可以看看下面这一篇知乎。
同时,在合工大这篇硕士论文中,也给了标量形式的控制框图。
3.仿真对比分析
3.1仿真参数
仿真电机为隐极/表贴式的PMSM,采用id=0控制。
Tpwm = 4e-4;%开关周期
Tspeed = Tpwm;%转速采样周期
Pn = 4;%电机极对数
Ls = 8.5e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Rs = 3;%定子电阻
flux = 0.1688;%永磁体磁链
Vdc = 311;%直流母线电压
iqmax = 20;%额定电流
fc = 300;%电流环带宽,单位Hz,对应于wc=2*pi*fc
Rs1 = Rs;%控制器中的电阻参数,将影响PI调节器中的积分增益
Ls1 = Ls;%控制器中的电感参数,将影响PI调节器中的比例增益

仿真工况:初始给定转速1200r/min,空载启动;0.2s突加10Nm负载;0.35s给定转速突减为600r/min。
这里选取的开关频率为2.5kHz,而且在仿真中也设置了控制系统的一拍延时。开关频率设置为这么低是尽可能地恶化控制条件,突出复矢量电流环的优势!
这里还没有考虑电机的参数失配,待会后面再看看参数失配的影响。
仿真的模型有:
1.传统的PI电流环,无任何补偿措施
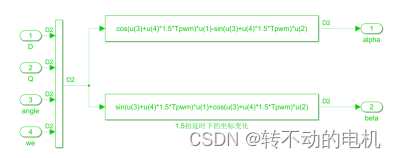
2.基于状态反馈解耦的电流环,同时加入了1.5拍的数字延时补偿
3.基于复矢量解耦的电流环,同时加入了1.5拍的数字延时补偿
1.5拍的数字延时补偿见下图。
3.2无参数失配下的仿真对比
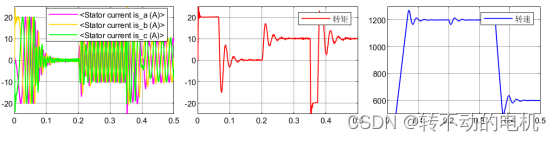
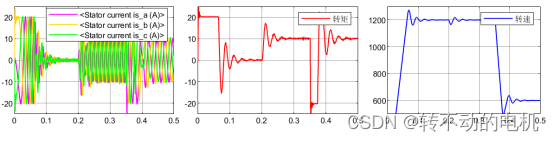
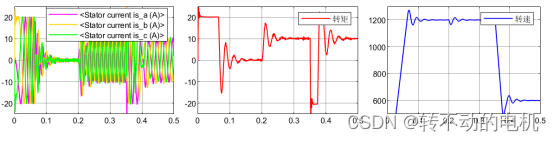
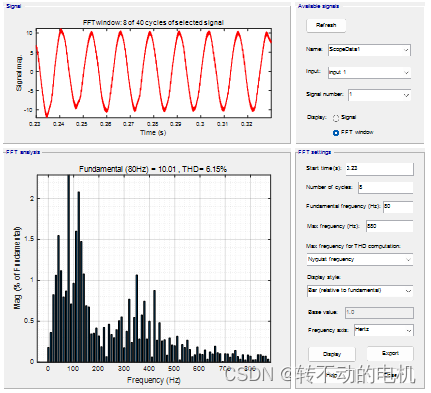
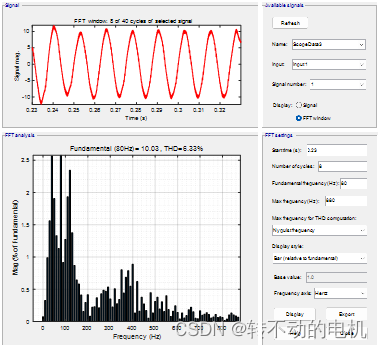
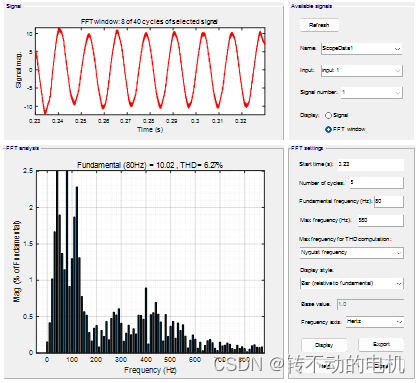
可以看到,在整个过程中,各个控制策略的三相电流波形、转矩波形、转速波形都差不多,貌似没有任何的不一样。各个控制策略的相电流FFT分析结果也基本一致(THD分别为6.15%/6.33%/6.27%)。
那复矢量PI电流环的优势究竟在哪里呢?
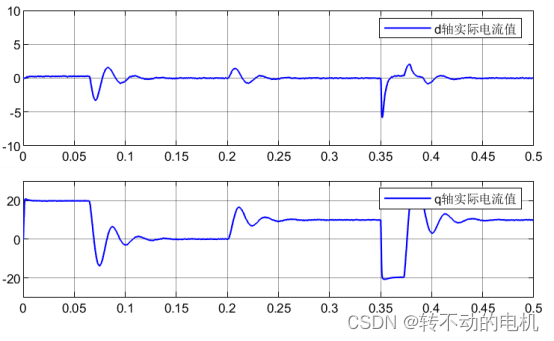
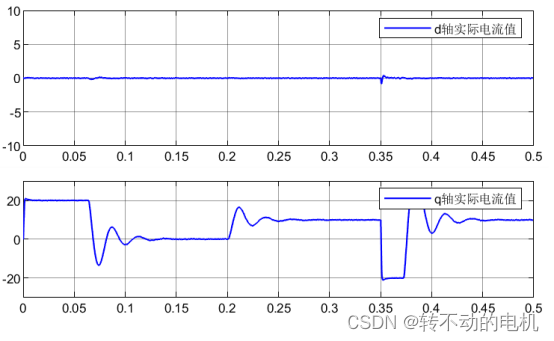
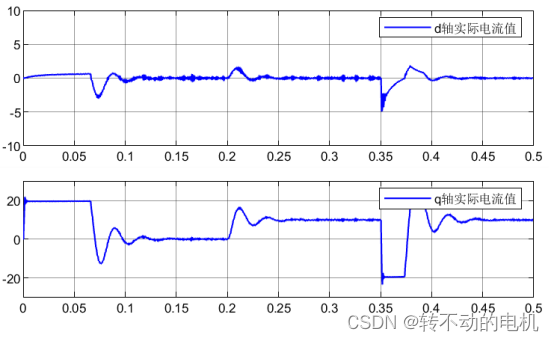
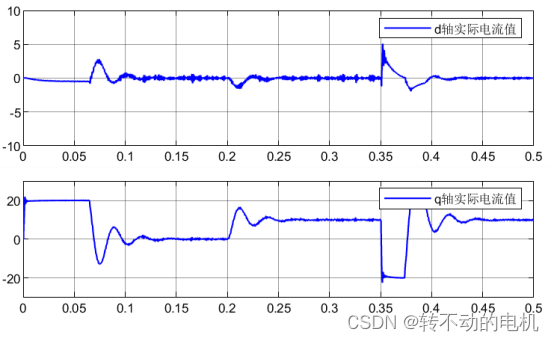
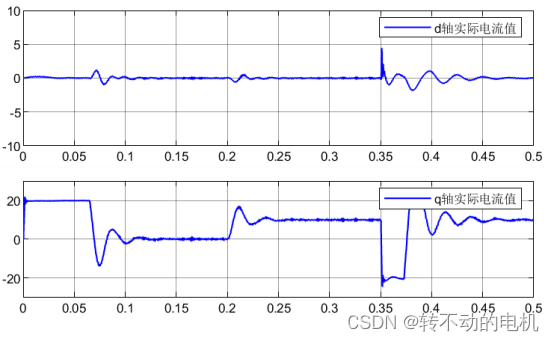
主要就是体现在动态过程中的解耦性能。
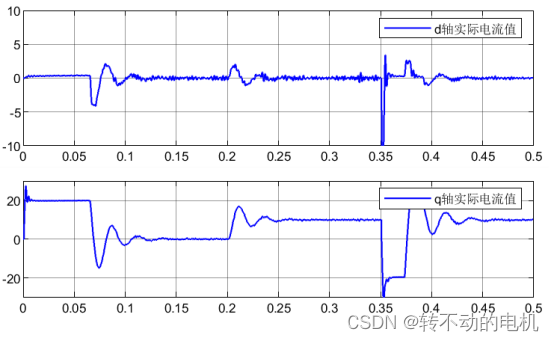
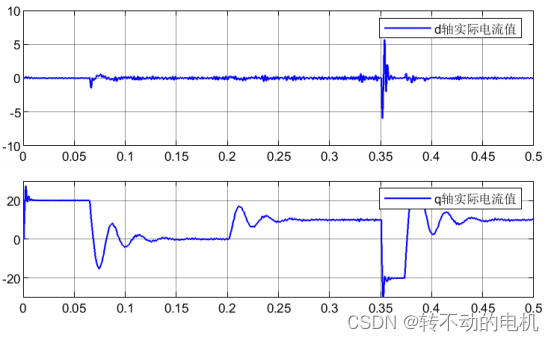
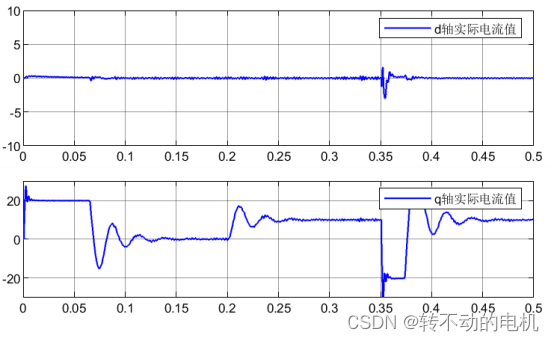
从上述波形中可以看到,在采用id=0控制的前提下,只采用PI调节器的电流环的d轴电流波形在动态过程中出现了极大的波动;基于状态反馈解耦电流环的的d轴电流波形的波动并没有太大;基于复矢量电流环的的d轴电流波形基本没有波动,仅在0.35s出现了d轴电流轻微波动。
3.3控制频率的影响
在上述仿真中,开关频率和控制频率都是2.5kHz,现在把它们改为10kHz看看有何变化。
从仿真结果来看,只采用PI调节器的电流环和基于状态反馈解耦电流环的d轴电流波动明显减小,而且基于状态反馈解耦电流环的d轴电流波动非常小,能达到与复矢量PI电流环相当的水平。
这里先抛出一个定义,载波比,通常是中控制频率除以基波电流频率的比值。例如,在基波电流频率不变的前提下,控制频率越低,载波比越低;在控制频率不变的前提下,电机转速越高,即基波电流频率越高,载波比越低。
对比两种开关频率下的仿真可以发现:
1.如果只采用PI调节器进行控制,不进行任何解耦补偿,动态过程中不可避免的出现d轴电流脉动。特别是在低载波的情况下,仿真中的d轴电流甚至达到了负十几A,负的d轴电流是发挥弱磁的功能。大家都知道“弱磁升速”,假设电机运行的转速很高,此时电机也很接近SVPWM电压输出的极限,如果此时突增这么大的负向d轴电流,可能导致电机到达非常危险的转速且不受控。
2.在控制器参数等于电机参数的前提之下,且载波比不低的情况下,基于状态反馈解耦PI电流环和基于复矢量PI电流环具有非常接近的性能。
3.在载波比较低的情况下,基于复矢量PI电流环具有最佳的电流控制效果,能够稳定地实现id=0控制。
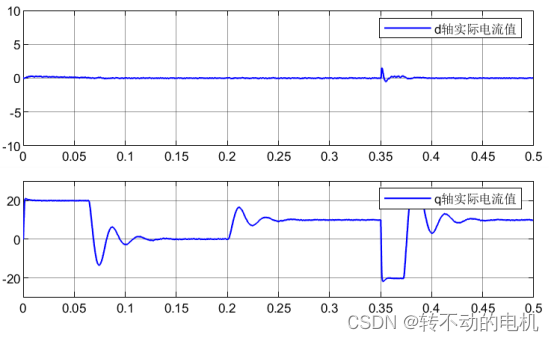
理论上来说,采用复矢量电流环能够完全实现id=0控制,不会出现d轴电流波动。那为什么在0.35s时,基于复矢量电流环的d轴波形还会出现一点脉动呢?
这由于逆变器出现了过调制。0.35s时,电机转速为1200r/min,转矩为10Nm,此时已经接近SVPWM输出电压的极限了。
那我现在把直流母线电压由原来的311V改为511V,开关频率还是10kHz,可以看到0.35s时的d轴电流波动消失了。

3.4参数失配的影响

注意到,电流环PI调节器参数总是和电阻、电感参数有关。
在实际中由于电机带负载时电流增大,同时会使得电机电感减小,即控制器电感大于实际电感;当电机运行时间较长时,电阻发热,使得电阻温度升高,进而使得电机电阻增大,即控制器电阻小于实际电阻。
所以仿真中选取的控制器电感及电阻分别为:
Rs1 = 0.5*Rs;%控制器中的电阻参数,将影响PI调节器中的积分增益
Ls1 = 2*Ls;%控制器中的电感参数,将影响PI调节器中的比例增益
此时的开关频率设置为5kHz。
对比参数失配下的仿真可以发现:
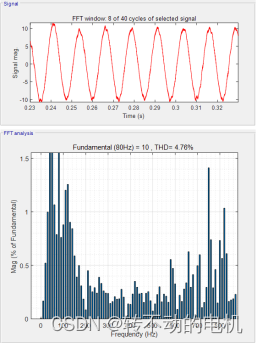
1.只采用PI调节器进行控制和基于状态反馈解耦PI电流环具有非常接近的性能,两者在动态过程中的d轴电流波动都比较大;而且仔细观测两者的d-q电流波形,其d-q电流波形中出现了很明显的高频谐波(这是由于我们选取控制器电感Ls1等于两倍的实际电感Ls,而比例增益Kp=带宽*Ls1,控制器电感变大,导致Kp变大,引入了高频谐波)。
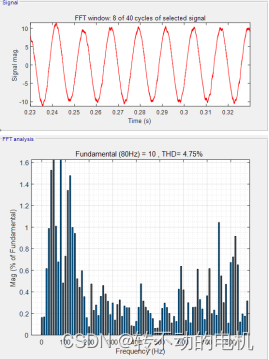
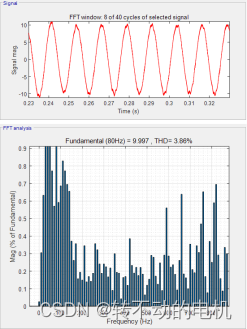
2.在参数失配的情况下,基于复矢量PI电流环具有最佳的电流控制效果,虽然动态过程中也会出现一定的电流波动,但是电流波动明显要小于其他两种策略;而且基于复矢量PI电流环没有因为参数失配而导致高频谐波电流的出现。基于复矢量PI电流环对应的相电流THD仅有3.86%,要优于其他两种策略的4.75%,THD优化了接近一个点。
4.总结
基于复矢量PI电流环在低载波比以及控制器参数失配的情况下,都具有更加优异的控制性能!
后续可能会花时间学习复矢量电流环加有源阻尼,但是可能也得过一个月以后了,后续有时间再更新。感兴趣的可以先看下面这两篇文献。



















 3637
3637

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











