







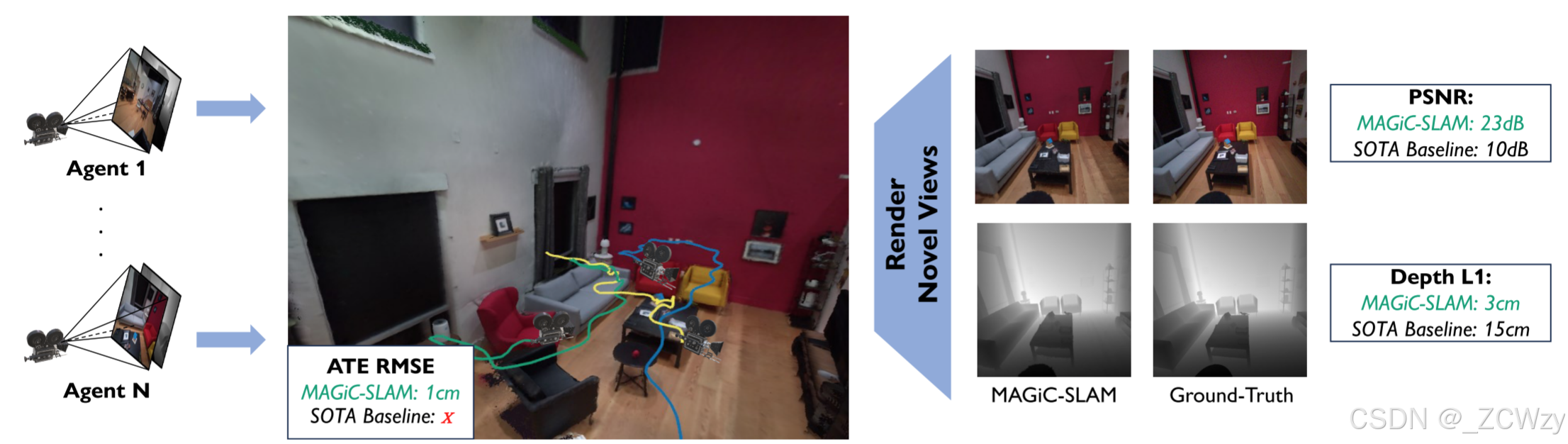
 图1所示。MAGiC-SLAM是一种多智能体SLAM方法,具有新颖的视图合成能力。给定来自多个同时运行的代理的单摄像头RGBD输入流,MAGiC-SLAM估计它们的轨迹并重建一个可以从以前未见过的视点渲染的3D高斯图。我们展示了真实世界环境的高保真3D高斯地图,以及其中的多个智能体轨迹(以绿色、黄色和蓝色表示)。我们的方法有效地利用了多个智能体的信息,达到了厘米级的跟踪精度。我们的地图和地图合并策略允许颜色和深度的逼真渲染,显着提高了艺术状态。与以前的方法不同,MAGiC-SLAM在可以处理的代理数量上是灵活的
图1所示。MAGiC-SLAM是一种多智能体SLAM方法,具有新颖的视图合成能力。给定来自多个同时运行的代理的单摄像头RGBD输入流,MAGiC-SLAM估计它们的轨迹并重建一个可以从以前未见过的视点渲染的3D高斯图。我们展示了真实世界环境的高保真3D高斯地图,以及其中的多个智能体轨迹(以绿色、黄色和蓝色表示)。我们的方法有效地利用了多个智能体的信息,达到了厘米级的跟踪精度。我们的地图和地图合并策略允许颜色和深度的逼真渲染,显着提高了艺术状态。与以前的方法不同,MAGiC-SLAM在可以处理的代理数量上是灵活的
摘要
具有新颖视角合成能力的同步定位与地图构建(SLAM)系统在计算机视觉中得到了广泛应用,其应用领域包括增强现实、机器人技术和自动驾驶。然而,现有的方法局限于单智能体操作。近期的工作通过使用分布式神经场景表示来解决这个问题。不幸的是,现有的方法速度较慢,无法准确地呈现真实世界的数据,仅限于两个智能体,并且跟踪精度有限。相比之下,我们提出了一种基于刚性可变形3D高斯的场景表示,极大地加快了系统速度。然而,由于轨迹漂移和不同智能体观测的差异,提高跟踪精度和从多个智能体重建全局一致的地图仍然具有挑战性。因此,我们在基于高斯的SLAM流程中提出了新的跟踪和地图融合机制,并集成了闭环检测。我们在合成数据集和真实世界数据集上对MAGiC - SLAM进行了评估,发现它比现有技术更准确、更快速。
我们提出了MAGiC - SLAM,这是一种具备多智能体新视角合成(NVS)能力的同步定位与地图构建(SLAM)流程,旨在克服这些局限性。 首先,MAGiC - SLAM采用3D高斯作为场景表示,支持刚体变换。每个智能体将输入的RGB序列分块(子地图)处理,这些块可以被有效地校正并合并成一个连贯的全局地图。 其次,我们实现了一种闭环机制来提高轨迹精度,通过利用所有智能体的信息。它通过一个基于基础视觉模型的新型闭环检测模块得到进一步增强,该模块能更好地对未见过的环境进行泛化。 最后,我们灵活的跟踪和映射模块使我们的系统能够实现较高的速度,并轻松扩展到不同数量的智能体。 总体而言,我们的贡献可以总结如下:
- 一个支持任意数量的智能体同时操作并进行一致3D重建的多智能体NVS能力的SLAM系统
- 一种用于高斯地图的闭环机制,利用基础视觉模型进行闭环检测
- 高效的地图优化和融合策略,减少所需的磁盘存储和处理时间
- 一个稳健的基于高斯的跟踪模块
3. Method
MAGiC - SLAM 架构如图2所示。每个智能体处理一个RGB - D流,执行局部地图绘制和跟踪。3D高斯被用于表示智能体的子地图并提高跟踪精度。基于基础视觉模型的闭环检测模块从RGB图像中提取特征,并将它们与局部子地图数据一起发送到中央服务器。服务器根据图像编码检测闭环,进行位姿图优化,并将优化后的位姿返回给智能体。在运行结束时,服务器将智能体的子地图融合成一个全局高斯地图。本节介绍了每个智能体的地图绘制和跟踪机制,并描述了全局闭环和地图构建过程。
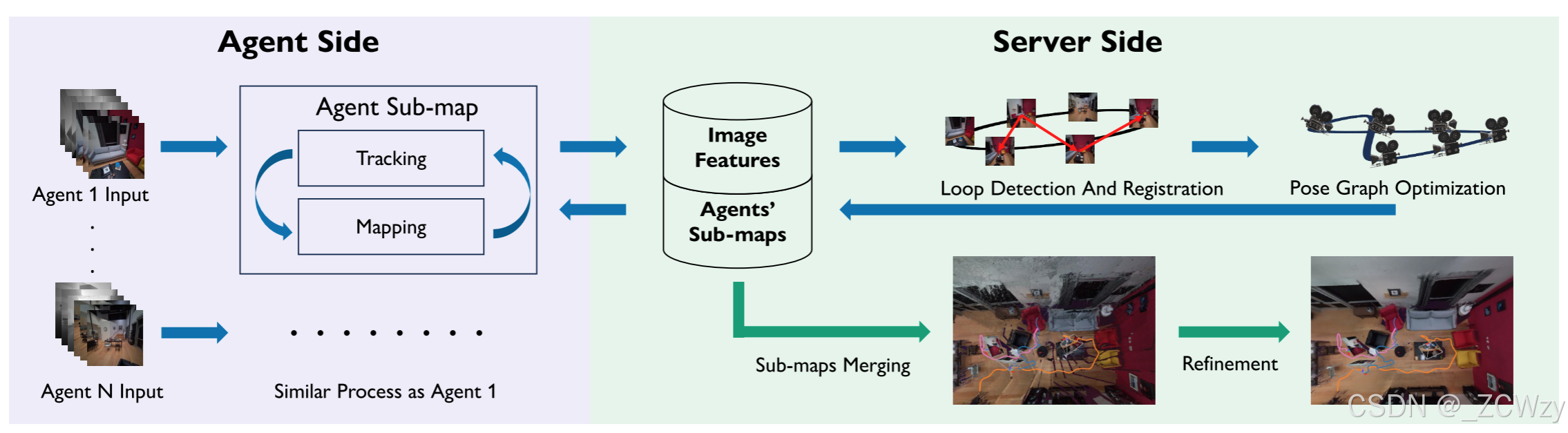
图2。MAGiC-SLAM架构。代理端:每个代理处理一个单独的RGBD流,维护一个局部子映射并估计其轨迹。当代理启动一个新的子映射时,它将之前的子映射和图像特征发送到集中式服务器。服务器端:服务器存储来自所有代理的图像特征和子地图,并执行环闭合检测、环约束估计和姿态图优化。然后,它更新存储的子映射并将优化的姿势返回给代理。一旦算法完成(用绿色箭头表示),服务器就会将累积的子地图合并为一个统一的地图并对其进行细化
3.1. Mapping
每个智能体处理一个有限大小的单一子地图,该子地图表示为一组3D高斯分布。子地图从第一帧开始初始化。从提升到3D RGB - D帧中采样的θ样本点作为新3D高斯的均值。基于渲染不透明度,新的高斯分布被添加到活动子地图的低高斯密度区域,并使用以下损失进行优化:
其中是超参数。颜色损失
定义为:
其中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









