







文章目录
Baxter环境安装
硬件准备
- 一个大小不少于4G的U盘,最好是4G用太大的U盘会导致资源的浪费(U盘会被格式化)
- 一个装有机械硬盘的电脑或游戏本1
Ubuntu16.04环境准备
制作U启动盘
- 从网上找到Ubuntu16.04的系统镜像(当然你也可以选择安装其他系统,只需要找相应的镜像即可)。
- 找到合适的刻录软件,这里推荐使用Rufus,还挺好用的。
- 插入准备好的U盘,打开刻录软件,将准备好的系统镜像刻录到软件中。
分配磁盘
- 进入电脑磁盘管理,分出不少于60G的空白区间,这里我分了60G,安装过程中又把它分为了4G和56G两个部分。其中分区5,即4G分区是Linux的系统盘,另一个是Linux的数据盘。Windows无法访问这两个盘符。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-1OM3rFTE-1641661868374)(C:\Users\86156\AppData\Roaming\Typora\typora-user-images\image-20220108204235066.png)]
安装Ubuntu系统
- 插入制作好的U启动盘。重启电脑,进入BIOS(联想电脑是在开机前按F2键,不同电脑可能略有不同)
- 进入Configuration,将存储模式改为Linux系统可识别的AHCI模式
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eE5UBRJW-1641661868375)(file:///D:\APP\QQ\1297878915\Image\C2C\ED3D29F897D83173161E7CED94AE239F.jpg)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-sQhmIC04-1641661868376)(file:///D:\APP\QQ\1297878915\Image\C2C\D5FA9B0C93E8BBA552C46FE519579AB6.jpg)]
- 进入BOOT,将系统的启动顺序改为U盘启动,这样电脑开机就会进入U盘系统啦
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BFlzb3Mf-1641661868376)(file:///D:\APP\QQ\1297878915\Image\C2C\0749930E06C5E8D242C005F5B0DBA17A.jpg)]
- 更改其他启动安全项,一般是关闭系统保护,以便进入U盘系统。不同电脑有所不同,可以网络查找到。
- 如果出现这种形式的黑屏,输入exit,重新选择启动模式。没有就直接跳过这步。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kNKDizOA-1641661868377)(file:///D:\APP\QQ\1297878915\Image\C2C\ED227DC3AE61CEF20FAF1445FFB7DA3C.jpg)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5vBh1lMU-1641661868377)(file:///D:\APP\QQ\1297878915\Image\C2C\4A05D7D2F9D0F00BD69FA5B66F85CD79.jpg)]
- 进入Ubuntu
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-EIX8Abcd-1641661868378)(file:///D:\APP\QQ\1297878915\Image\C2C\26154CD70A81FDD8D3D2363D765249C0.jpg)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eyffU5VY-1641661868379)(file:///D:\APP\QQ\1297878915\Image\C2C\23820CB6A15BA1D32C8CB4ED8FA5401B.jpg)]
- 注意此时进入的系统只是U盘中的临时系统,需要通过系统复制(systemback软件),将U盘系统复制到你的个人电脑上
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ln2okZSI-1641661868379)(file:///D:\APP\QQ\1297878915\Image\C2C\EB7CCC3BA51FF1F027EAC588DA4DBF61.jpg)]
- 注意勾选“复制用户数据文件”,选择合适的挂载点,将Linux的交换分区(/swap)以及主数据分区(/)挂载到硬盘的合适位置。注意选择自己分配出的空白分区以免破坏电脑原有文件。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zkcIcraI-1641661868380)(file:///D:\APP\QQ\1297878915\Image\C2C\B57B1EA6A4F9E562FE6788AB2E8D44B9.jpg)]
- 如果找不到合适的挂载点,或者找不到分配出来的合适空间,可以在Ubuntu下安装GParted软件对硬盘进行重新分区。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ra04bwsX-1641661868380)(file:///D:\APP\QQ\1297878915\Image\C2C\39A97CCF7A7871E7499F916535A7D73F.jpg)]
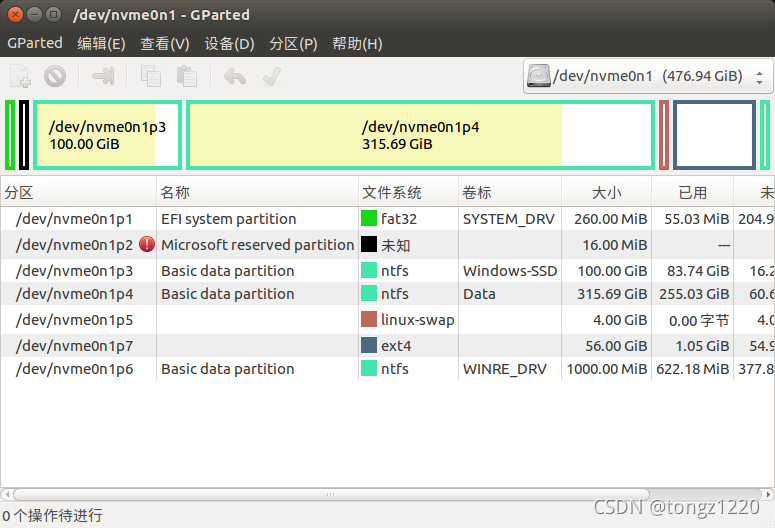
- 建立硬盘与Ubuntu系统的链接
sudo ln /dev/nvme0n1 /dev/sdf
sudo ln /dev/nvme0n1p1 /dev/sdf1
sudo ln /dev/nvme0n1p2 /dev/sdf2
sudo ln /dev/nvme0n1p3 /deb/sdf3
- 为防止出现无法启动的情况,最好先主动修复一下启动项,可以省去很多麻烦
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dSuHUlwz-1641661868381)(file:///D:\APP\QQ\1297878915\Image\C2C\8D45DCE0673685FDB48090C2A19EB411.jpg)]
- OK,大功告成!
可能出现的错误及解决方案
轻薄本电脑很可能会出现固态硬盘无法识别的情况,因此推荐使用游戏本或带有机械硬盘的电脑,如果出现无法识别的情况,可以参考我总结的一些经验:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-AQA8SZEQ-1641661868381)(C:\Users\86156\AppData\Roaming\Typora\typora-user-images\image-20220109001117576.png)]
systemback系统复制出镜像_m0_48440870的博客-CSDN博客
ROS环境准备
与Ubuntu 16.04相匹配的是ROS kinetic版本。
安装过程
1、设置sources.list
CTRL+ALT+T打开终端,输入以下命令
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2、设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、更新package
sudo apt-get update
4、安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full
5、初始化rosdep
sudo rosdep init
rosdep update
6、配置ROS环境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7、安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
8、测试ROS是否安装成功
(1) CTRL+ALT+T打开新终端(Termial),输入以下命令,初始化ROS环境:
roscore
(2) 再打开一个新的终端,输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node
(3) 出现一个小乌龟的LOGO后,再打开一个新的终端,输入以下命令
rosrun turtlesim turtle_teleop_key
然后,可以通过方向键控制小乌龟的移动。
如果你能顺利进行到这一步,说明ROS安装成功了。
常见错误及其解决方案
安装ROS中最容易出现的两个问题是rosdep init失败和rosdep update失败,rosdep init失败大多通过尝试更改软件源就可以解决,而rosdep update失败则比较复杂,我将我整理的解决方案汇总到博客里了,这里就不过多赘述了:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-jg0w99TM-1641661868382)(C:\Users\86156\AppData\Roaming\Typora\typora-user-images\image-20220108220943882.png)]
rosdep update 失败的解决方案汇总(已解决)_m0_48440870的博客-CSDN博客_rosdep update失败
安装BaxterSDK
下面介绍如何在kinetic上配置Baxter环境:
1、创建 ROS 工作空间
mkdir -p ~/ros_ws/src
2、Source ROS
source /opt/ros/kinetic/setup.bash
注意:在每次打开终端时,都先要运行上述命令才能运行 ros 相关命令,为了避免这一繁琐过程,可以事先在.bashrc 文件(该文件在当前系统的 Home 目录下)中添加这条命令。这样当你每次登录后,系统自动帮你执行这些命令配置好开发环境。
3、编译与安装
这一步要在创建的工作空间 ros_ws 中进行,所以先要改变工作目录路径,进入 ros_ws。
cd ros_ws/
catkin_make
catkin_make install
4、安装 SDK 依赖项
sudo apt-get update
sudo apt-get install git-core python-argparse python-wstool python-vcstools python-rosdep ros-kinetic-control-msgs ros-kinetic-joystick-drivers
**5、安装 Baxter SDK **
(1) 使用 wstool 空间工具,会自动在 Baxter Github 中检查所有需要的源,并安装在 ROS工作空间(即 ros_ws)中。
cd ~/ros_ws/src/
wstool init
wstool merge https://raw.githubusercontent.com/RethinkRobotics/baxter/master/baxter_sdk.rosinstall
wstool update
这一过程安装时间比较长,如果电脑没有翻墙的话,很有可能安装不成功,所以进行此过程的时候最好先使用 VPN 连接
(2) Source ROS
source /opt/ros/kinetic/setup.bash
(3)编译与安装
同样,这一步也需要在 ros_ws 路径下进行,因此先要进入 ros_ws 路径。
cd ~/ros_ws/
catkin_make
catkin_make install
Baxter仿真环境安装
安装Gazebo
Gazebo可以仿真物理环境,其安装过程如下:
1、添加源
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list' wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
2、安装gazebo
sudo apt-get update
sudo apt-get install gazebo7 sudo apt-get install libgazebo7-dev
3.运行gazebo
gazebo
gazebo可以仿真Baxter的物理模型和外界环境。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8IBh4ZRg-1641661868382)(C:\Users\86156\AppData\Roaming\Typora\typora-user-images\image-20220109001651017.png)]
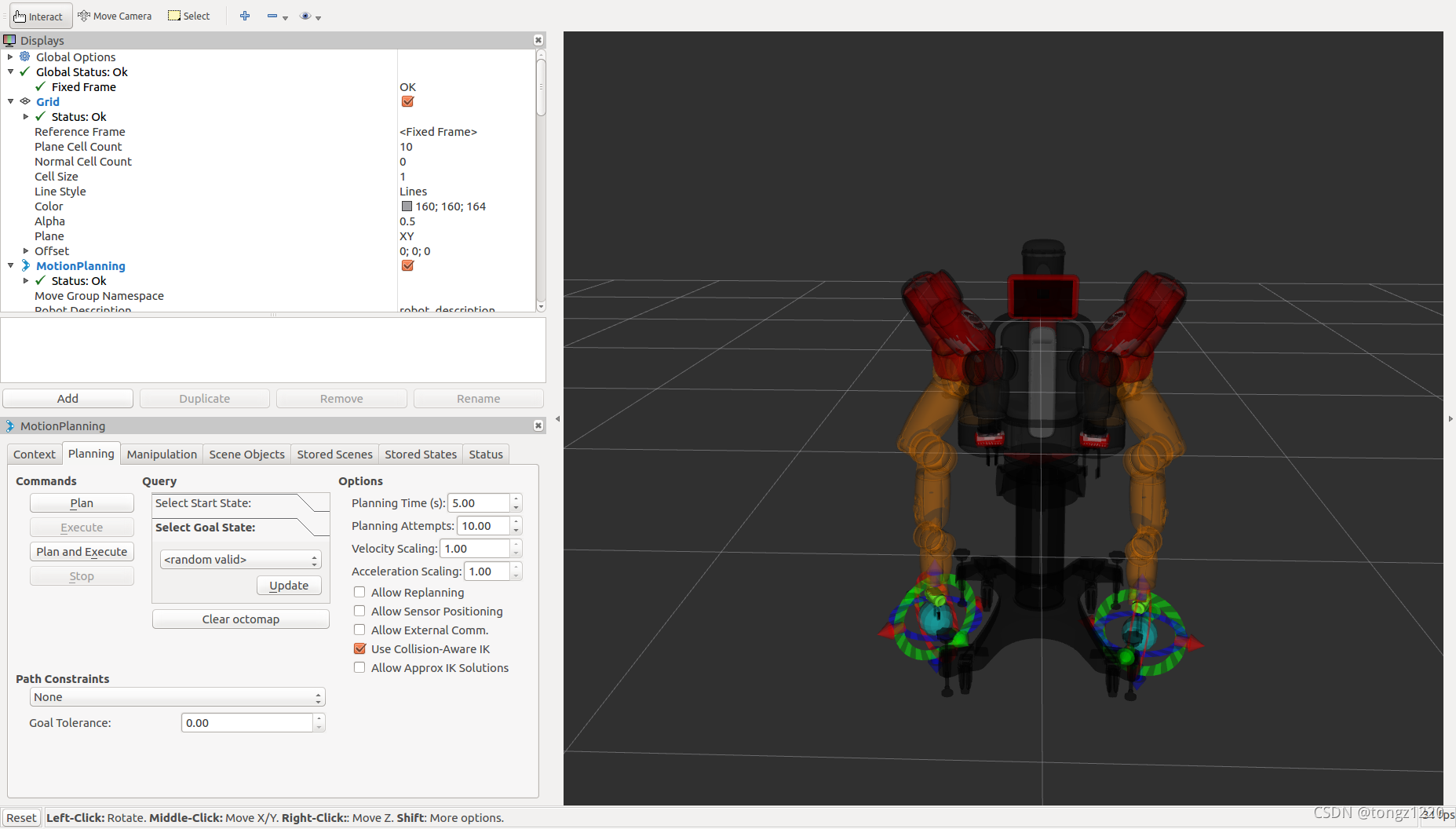
安装Rviz
Rviz是可视化工具,可以用于进行数据读取和运动学规划,其安装过程如下:
1、安装Rviz
sudo apt-get install ros-kinetic-rviz
2、检测是否安装成功
rosdep install rviz
rosmake rviz
3、运行
(1) 打开终端运行ros环境
roscore
(2) 打开新终端运行rviz
rosrun rviz rviz
rviz可以展现Baxter的参数情况,rviz打开的结果如下:
最好不要选择商务本或其他笔记本,会发生
systemback无法识别硬盘的状况,导致无法进行系统复制。 ↩︎















 1389
1389











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









