







一、松耦合与紧耦合
1.松耦合(Loosely Coupled)
松耦合 LIO 中,LIDAR 和 IMU 的观测量通常被独立处理。即分别处理来自 LiDAR 和 IMU 的观测数据,然后在高层次 Pose(Position + Orientation)上进行融合。
松耦合通常的思路是首先处理 IMU 的观测数据得到高频的位姿(Pose)信息,将高频的位姿信息用于 LiDAR 观测数据的去畸变和LIDAR 点云配准的初值,然后使用滤波的方式将IMU 观测数据处理得到的高频位姿信息(预测) 和 LIDAR 点云配准得到的位姿信息(观测)融合,得到更加精确的位姿信息。
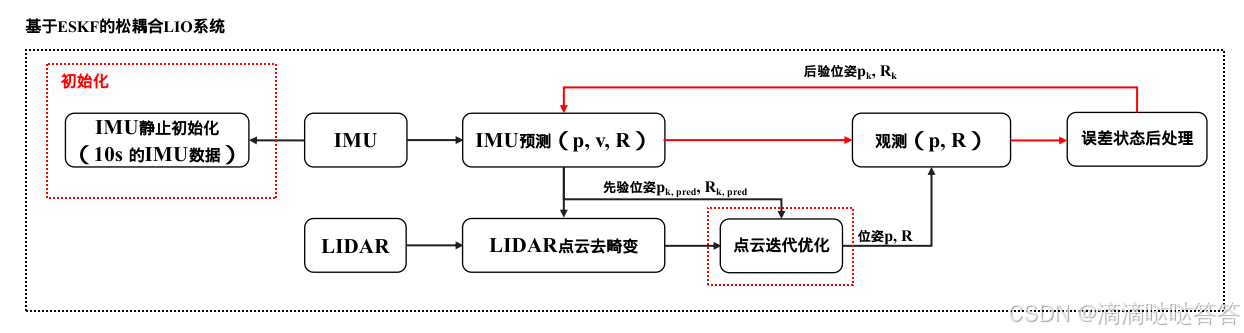
松耦合相关的研究成果有 LOAM (with IMU),LeGO-LOAM等;但松耦合 LIO 对 LiDAR 和 IMU 的融合仅体现在结果(Pose)层面,没有考虑两种观测数据间的内在约束,且依然无法解决一些退化场景问题。
2.紧耦合(Tightly Coupled)
紧耦合 LIO 中, LiDAR 和 IMU 的原始观测会被放到一起联合处理、考虑其内在联系并互相影响,是在低层次 传感器观测数据 上进行融合。
紧耦合通常的思路是首先将 IMU 观测数据经过处理后用于 LiDAR 观测数据的去畸变,然后 LiDAR 观测和 IMU 观测会被一起丢到某种形式的状态估计模型中,并以最小化 LiDAR 观测和 IMU 观测的总体误差为目的,估计出最终的 Position、Orientation、Velocity、Bias、Gravity 等状态量。
其中,IMU 数据通常以预积分的形式进行处理;对 Bias 的估计相当于用 LiDAR 观测反过来影响 IMU 的状态量;对 Velocity 和 Bias 这些状态量的估计体现了紧耦合的思想之一 —— 充分考虑观测之间的内在约束,而非仅仅对 Position,Rotation 这样的结果做融合;所谓“某种形式的状态估计模型”通常是滑窗优化(Sliding Window Optimization)或者迭代误差状态卡尔曼滤波(iESKF),前者能够批量估计近期多个时刻的状态量, 后者则以迭代卡尔曼滤波(iEKF)为基础框架递归式地估计当前时刻的状态量。滑窗优化和迭代误差状态卡尔曼滤波,是实现紧耦合 LIO 的两种主流方法。
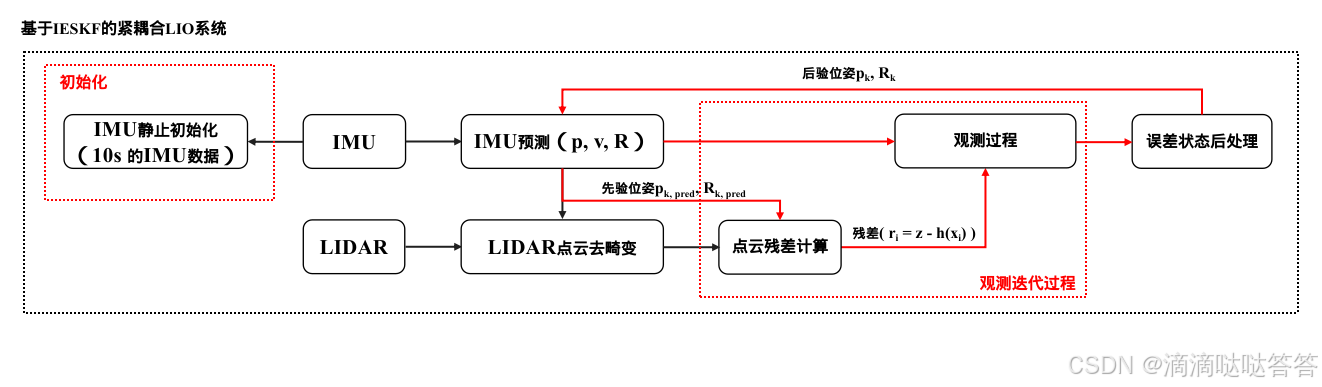
这里紧耦合体现在: 使用 imu 预测的先验位姿进行点云残差的计算,随后最小化总体误差!
紧耦合 LIO 相关的研究成果有 LIOM(LIO-Mapping)、LINS、LIO-SAM、LiLi-OM、Fast-Lio1&2、Faster-Lio等。紧耦合充分考虑了 LiDAR 观测和 IMU 观测的内在约束性,互相影响,共同决定最终的结果,理论上,能够应对松耦合无法解决的退化场景问题,比如长隧道环境、剧烈运动环境等。
参考
重读经典《Quaternion kinematics for the error-state Kalman filter》

















 1156
1156

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









