






 本文介绍了激光雷达的基本概念,包括机械式和固态激光雷达的工作原理和特点,以及激光雷达的测距方法。机械式雷达提供大视场角和高精度,而固态雷达则以快速和高可靠性著称。此外,文章还讨论了激光点云在运动中产生的畸变问题以及如何通过补偿技术去除畸变。同时提到了相机模型、IMU(惯性测量单元)和GNSS(全球导航卫星系统)在相关领域的应用。
本文介绍了激光雷达的基本概念,包括机械式和固态激光雷达的工作原理和特点,以及激光雷达的测距方法。机械式雷达提供大视场角和高精度,而固态雷达则以快速和高可靠性著称。此外,文章还讨论了激光点云在运动中产生的畸变问题以及如何通过补偿技术去除畸变。同时提到了相机模型、IMU(惯性测量单元)和GNSS(全球导航卫星系统)在相关领域的应用。
目录
1 传感器介绍与分析
1.1 传感器介绍及分析
1.1.1 机械式激光雷达和固态激光雷达
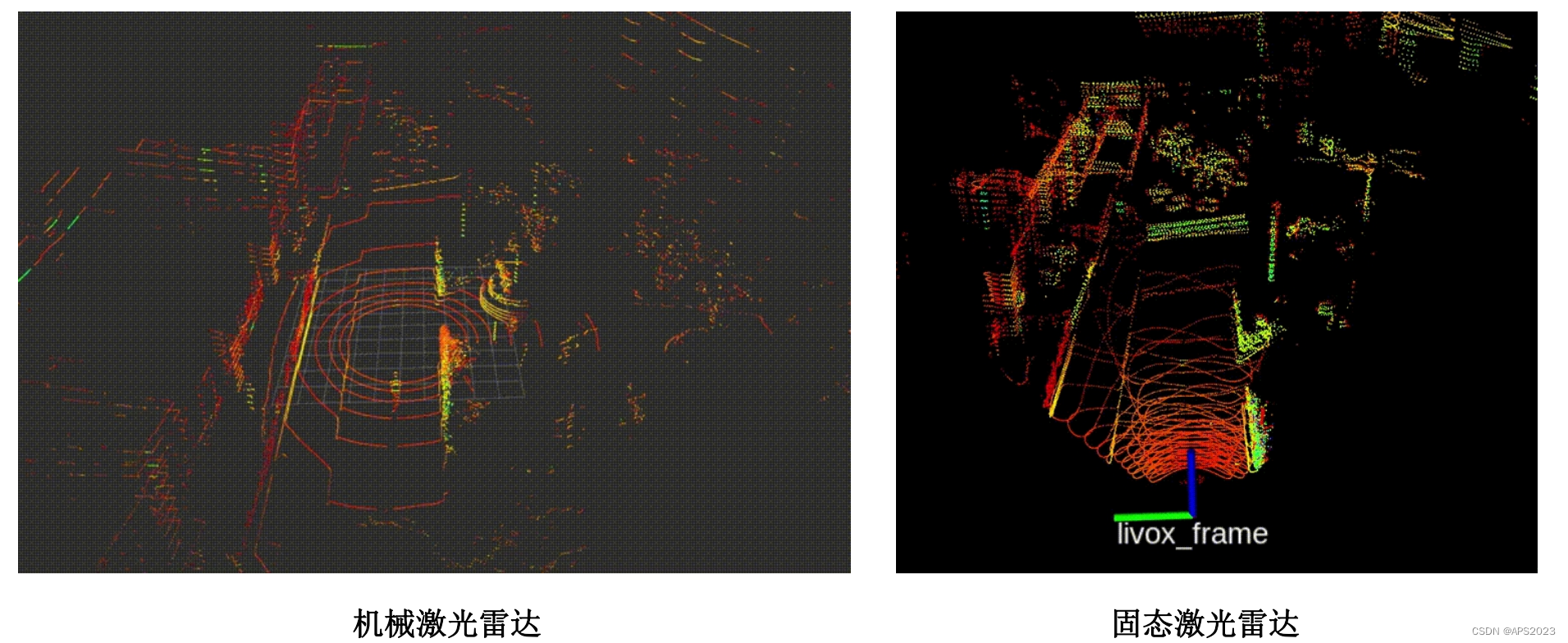
激光雷达可以测量环境的点云、深度信息,其不受环境、光照影响。
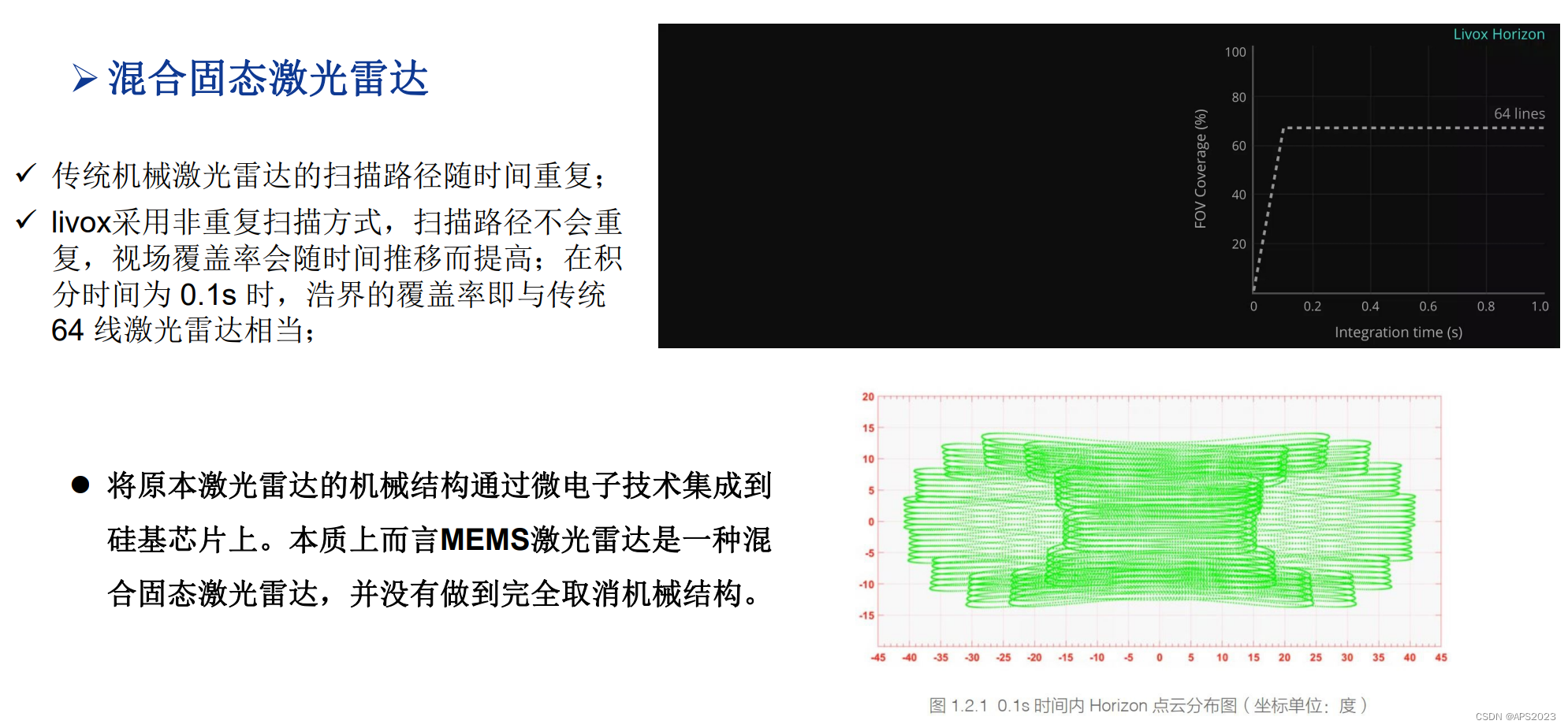
激光雷达分为机械式激光雷达和固态激光雷达:
机械式激光雷达和固态激光雷达是两种常见的激光雷达技术,它们在工作原理、结构和应用方面存在一些区别。
1. 机械式激光雷达:
机械式激光雷达通过机械旋转或振动扫描激光束,获取环境中的三维点云数据。它通常由一个旋转的激光发射器和一个接收器组成,激光束通过旋转或振动扫描来遍历整个场景。机械式激光雷达的特点包括:- 大视场角:机械式激光雷达可以实现较大的水平和垂直视场角,能够在短时间内获取较大范围的点云数据。
- 高精度:由于机械式激光雷达可以旋转或振动,它能够以较高的角分辨率获取点云数据,从而实现较高的空间分辨率和精度。
- 相对较慢的数据采集速度:由于机械部件的旋转或振动需要一定的时间,机械式激光雷达的数据采集速度相对较慢。机械式激光雷达常用于自动驾驶、机器人导航、三维建模等领域,其代表性产品包括Velodyne的HDL-64、HDL-32等。
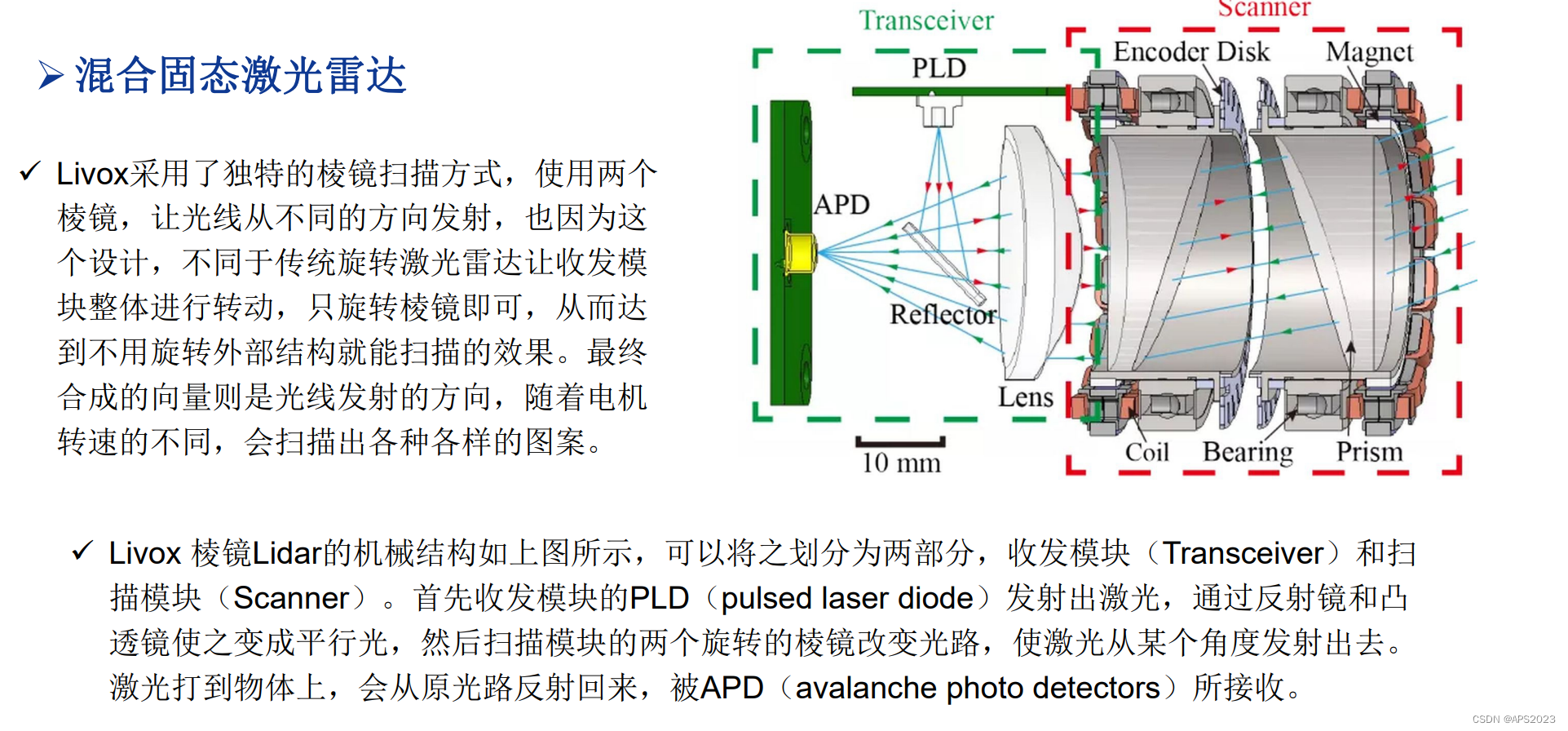
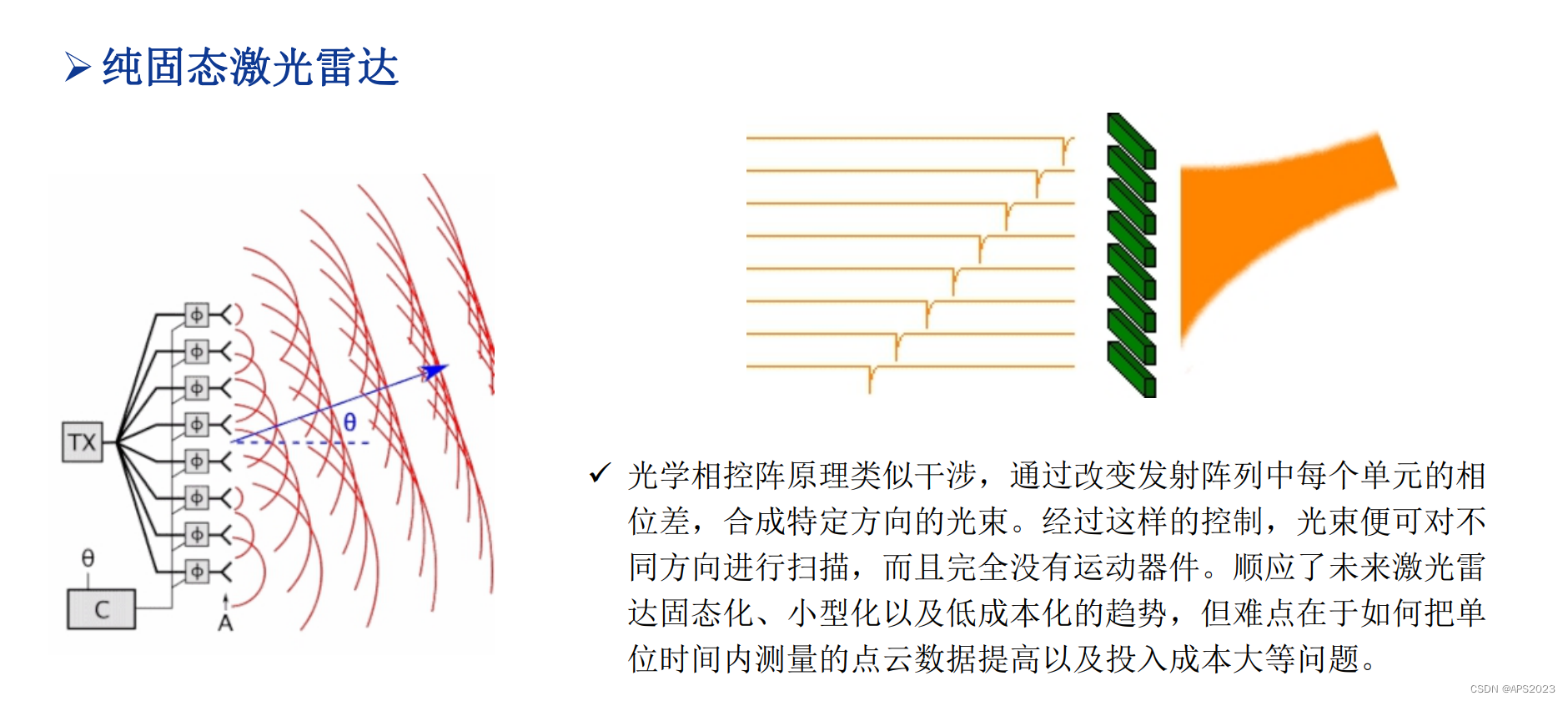
2. 固态激光雷达:
固态激光雷达是一种使用固态光电器件直接发射和接收激光束的激光雷达技术。它不需要机械部件的旋转或振动,具有高速、高精度和可靠性的特点。固态激光雷达的特点包括:- 快速数据采集速度:由于无需机械扫描,固态激光雷达能够以非常快的速度获取点云数据,适用于需要高实时性的应用场景。
- 较小的体积和重量:固态激光雷达采用集成的光学和电子元件,结构简单,体积小巧,适合在紧凑的空间中安装和集成。
- 较高的可靠性:由于无机械运动,固态激光雷达的耐久性和可靠性较高,对振动和冲击的抗干扰能力也较强。固态激光雷达在自动驾驶、智能交通、无人机等领域得到广泛应用。其代表性产品包括Velodyne的Alpha Puck、Velarray、Hesai的Pandar系列等。
总结起来,机械式激光雷达通过机械旋转或振动扫描激光束,适用于需要大视场角和高精度的应用,而固态激光雷达采用固态光电器件,无需机械运动,适用于需要快速、高可靠性的应用。
1.1.2 激光雷达测距原理
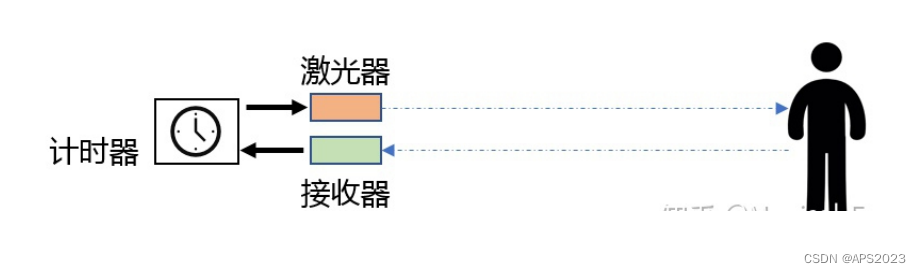
飞行时间测距原理:
激光雷达的发射器发射出一束激光,激光光束遇到物体后,经过漫反射,返回至激光接 收器,雷达模块根据发送和接收信号的时间间隔乘以光速,再除以2,即可计算出发射器与物体的距离。
三角测距原理:
激光雷达发射器先发射激光,经过物体反射后被接收器捕捉,过焦点作一条虚线平行于入射光线,左右两个三角形相似,通过几何关系可以计算出物体到激光发射器的距离。
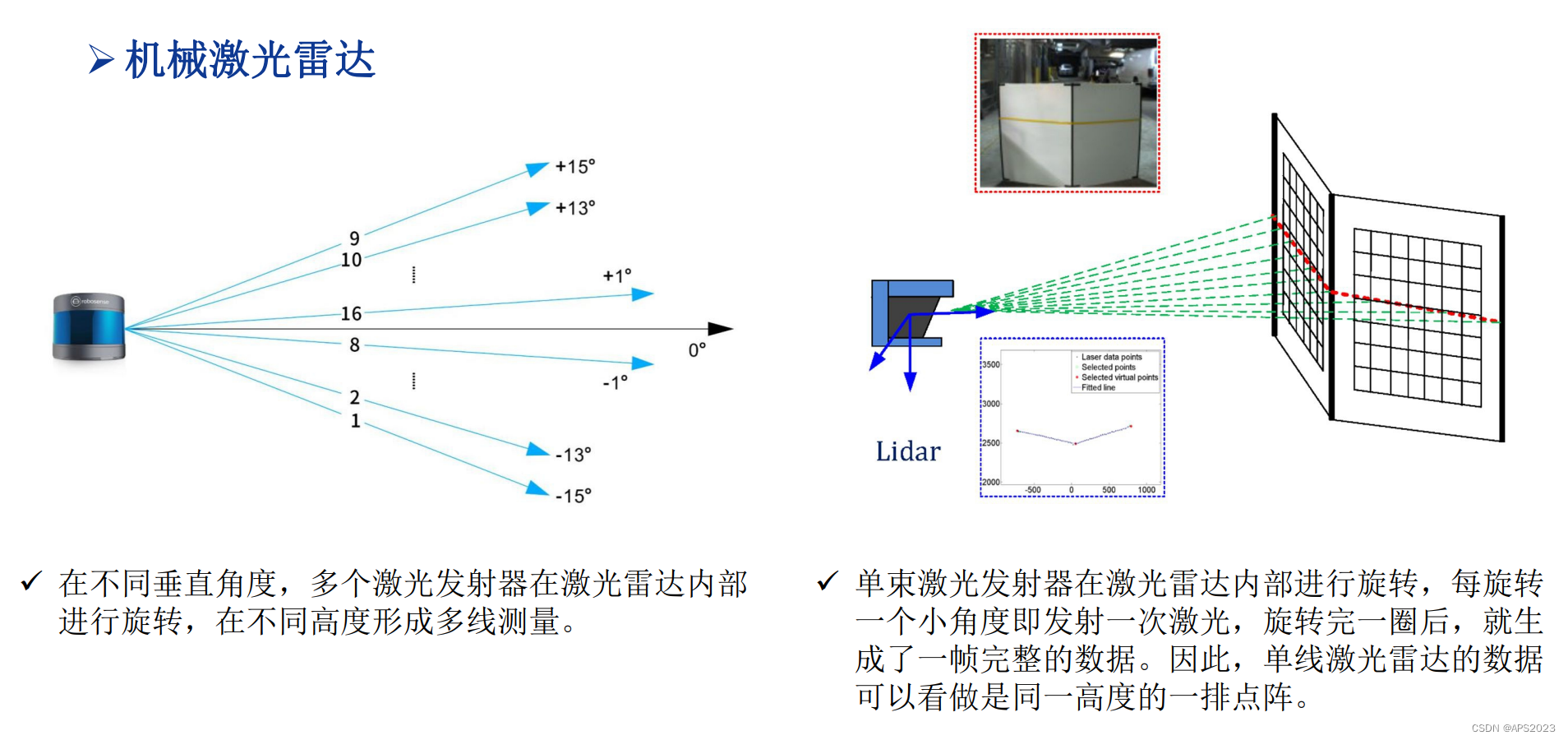
如果是单线激光雷达只能扫一条线(同一高度的一排点阵),如右图;如果多线(16/32/64)可以扫到多条线(在不同高度上可以进行多组测量,增加垂直分辨率)


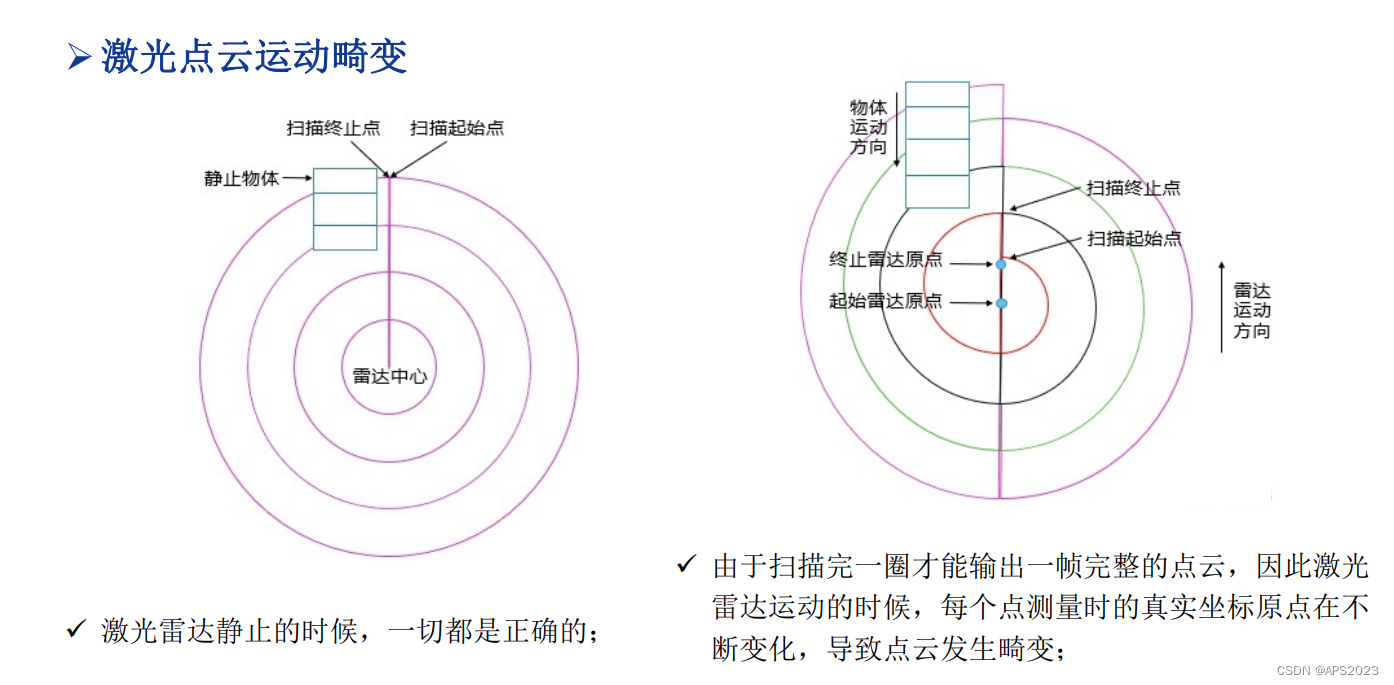
1.1.3 激光点云运动畸变
如图所示,物体将会被拉伸。如果在高速运动场景下(自动驾驶汽车)。
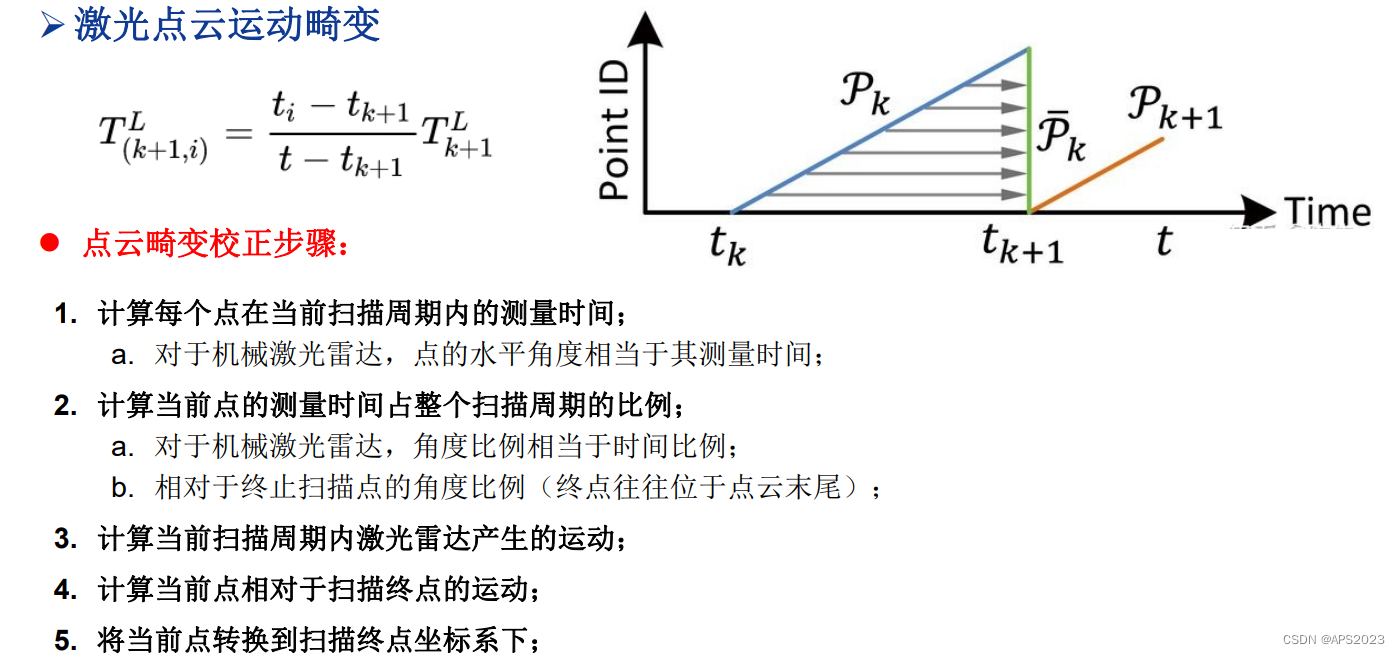
那么如何去除点云畸变呢?
对于从
的一帧激光点云来说,随着时间的推移,从第一个点扫描到最后一个点,扫描结束后又回到了某个位置进行新一帧的扫描......
导致激光雷达有畸变的本质原因在于每一个激光点都是在激光雷达不同位置(激光雷达在运动)下进行扫描的。如果我们知道这些点在测量的条件下的真实位置(相对于扫描第一个点的相对运动),我们就能将这个点根据相对运动补偿到第一个点下去除畸变。
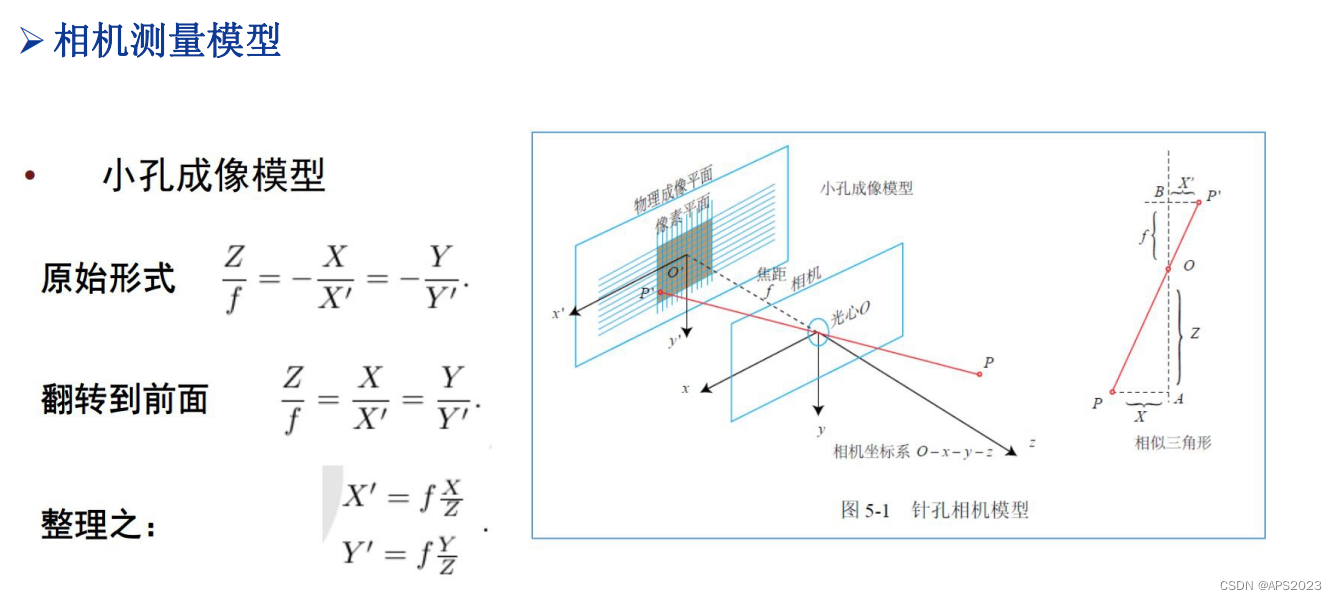
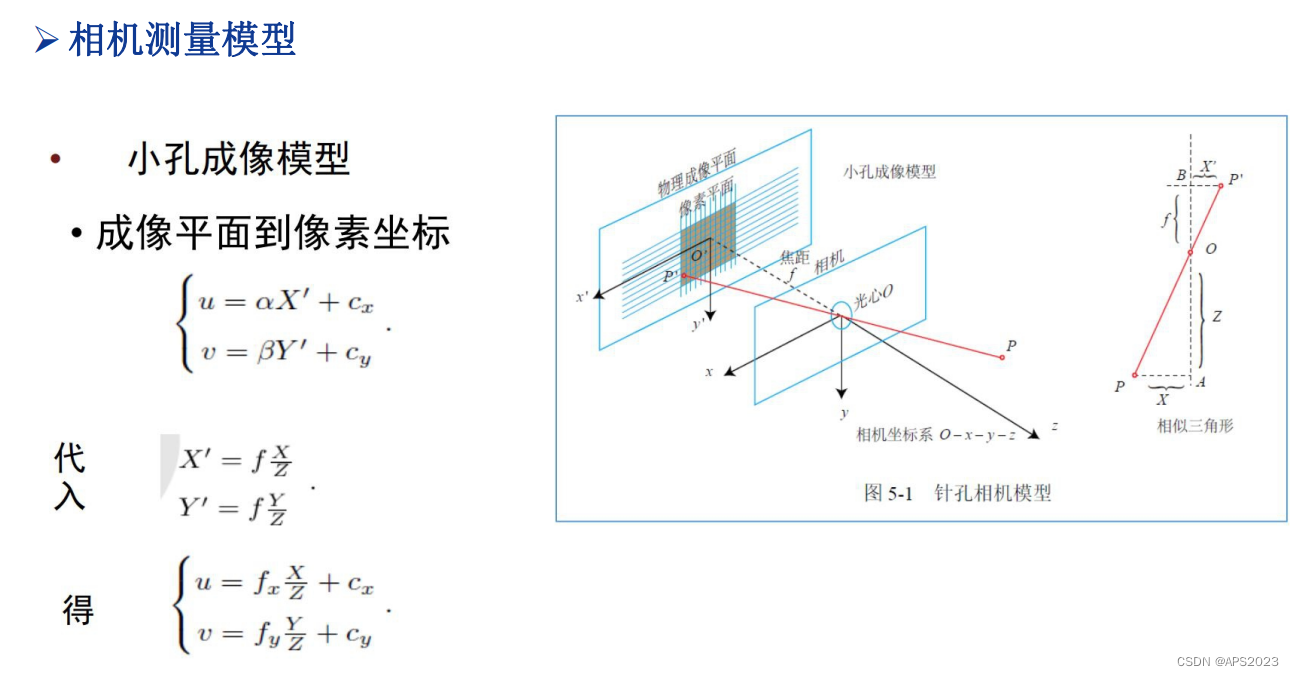
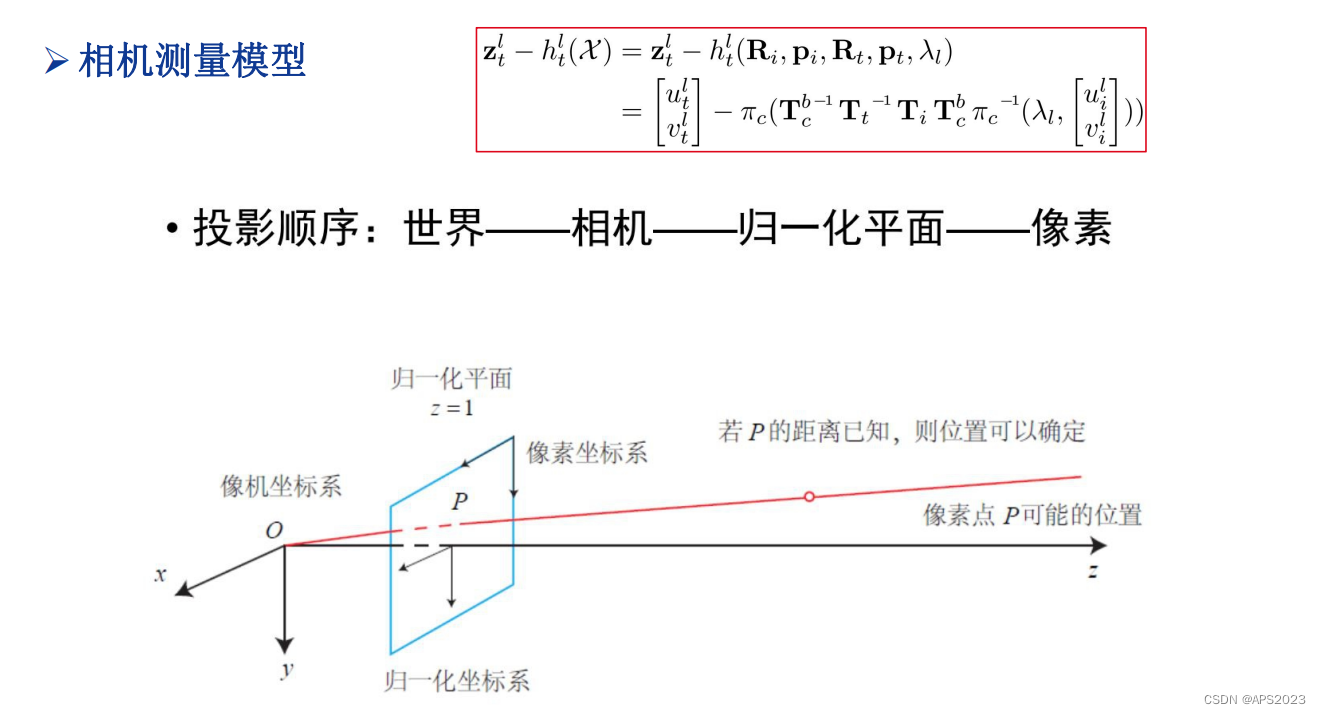
1.1.4 相机模型
小孔成像原理:
像素坐标系 -- 相机坐标系 -- IMU坐标系 -- 世界坐标系 -- t时刻IMU坐标系 -- t时刻相机坐标系 -- t时刻像素坐标系 -- 计算重投影残差
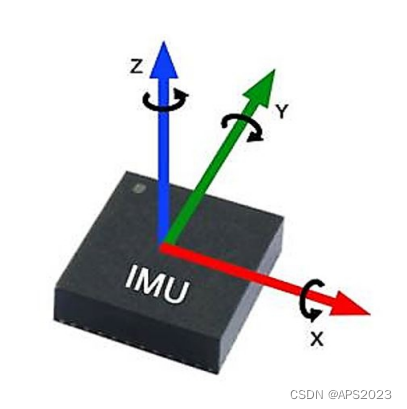
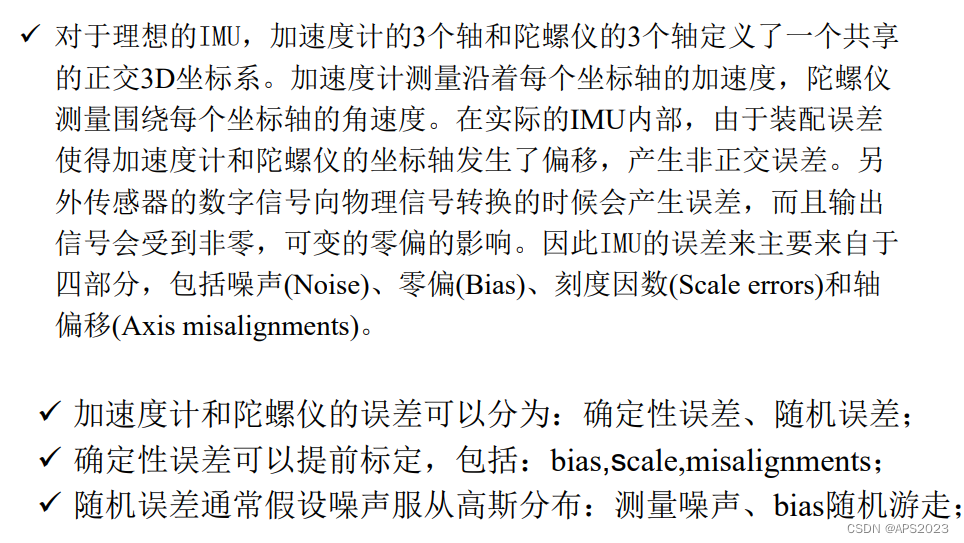
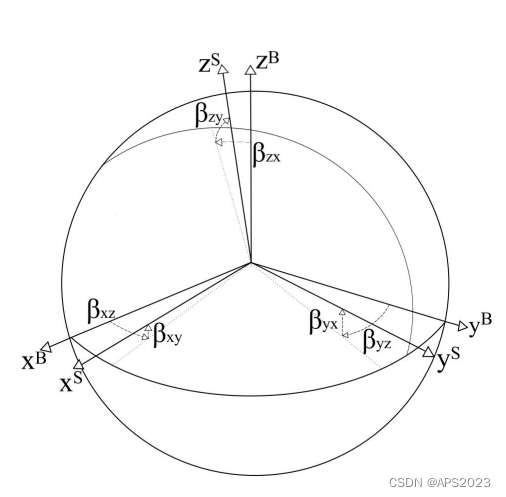
1.1.5 IMU
能计算加速度和角速度:



















 1781
1781

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











