







文章目录
接上文的carsim基础内容的简略介绍,这次我们进一步进行讲解个界面的含义以及参数修改.。
首先,我们参考上一篇文章*https://blog.csdn.net/m0_49842530/article/details/145576657,打开database


一、dataset数据集的复制
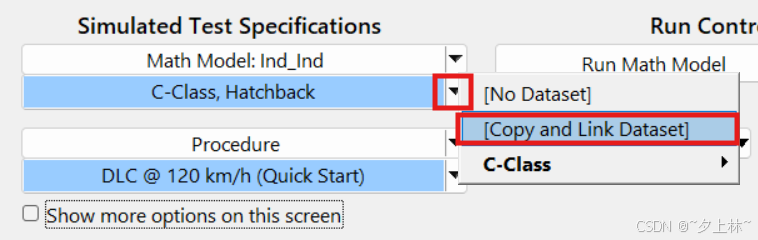
在每一个database项目文件夹中,系统自带的dataset数据集是不建议进行改动的,常见做法是对dataset进行“复制”操作,创建一个包含原始dataset内容的额外的新dataset。
如下两步操作对名为“baseline”的dataset进行复制操作

之后界面有如下两处变化,其余信息不变

复制后的baseline #1,我们可以对其进行任意操作,而不会影响其他baseline数据集。
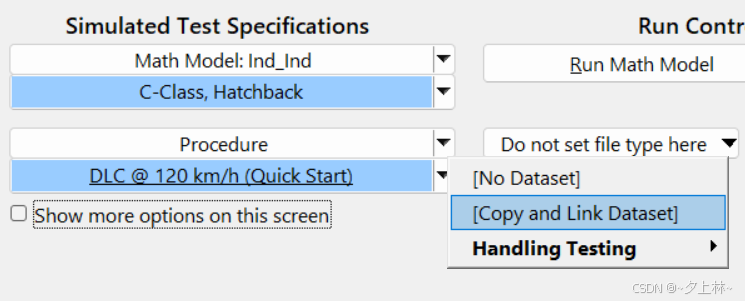
同样的,我们也需要对车辆信息和工况信息进行复制,否则我们在baerline #1中修改车辆信息,baseline中对应数据也会被修改(原因是二者共用同一个车辆数据和工况数据,类似C语言中的”地址“一说)
二、车辆信息和工况信息设置
如下图,第一个红框中是车辆信息;第二个红框是工况(包含道路信息)

车辆信息设置
(再修改前,我们也应该进行复制)


依次点击,我们可以选择其他类型的车辆或轮胎进行实验。
(注:这是新的项目文件夹,其中包含的车辆类型只有“C-Class,Hatchback”一种,如果打开“Carsim 2019.0_data"项目文件,有很多车辆可供选择)
点击“C-Class, Hatchback",可进入车辆信息设置界面

1. 信息介绍
Vehicle: Assembly
Generic C-Class hatchback with Strut front and S-Link rear suspension.
C-Class vehicles include the Audi A3, Chevrolet Cruze, Ford Focus, and Opel Astra.
2018.1: changed name, removed non-OSG version.
车辆:组装
具有支柱前悬挂和S型连杆后悬挂的通用C级掀背车。
C级车辆包括奥迪A3、雪佛兰科鲁兹、福特福克斯和欧宝阿斯特拉。
2018.1版本:更改了名称,移除了非OSG版本。
2. 车辆主体

车辆车身
- 刚性悬挂质量
- C级,掀背车
- 空气动力学
- C级,掀背车空气动力学
刚性悬挂质量
点击“C-Class, Hatchback",进入如下界面

下半部分的车辆信息Ai解释如下:
-
悬挂质量:这是指车辆车身和任何货物的质量,不包括非悬挂质量(悬挂、车轮等)。
-
惯性特性:
- 横滚惯性(Ixx):这是关于横滚轴(侧向轴)的转动惯量。它的值是536.6公斤-米²。
- 俯仰惯性(Iyy):这是关于俯仰轴(纵向轴)的转动惯量。它的值是1536.7公斤-米²。
- 偏航惯性(Izz):这是关于偏航轴(垂直轴)的转动惯量。它的值也是1536.7公斤-米²。
-
惯性积:
- 惯性积(Ixy)、(Ixz)和(Iyz):这些是惯性积的值,每个都给定为0公斤-米²。惯性积是衡量质量相对于坐标轴分布的指标。值为零表示轴与质量分布的主轴对齐。
-
回转半径(Rx、Ry、Rz):这些是关于x、y和z轴的回转半径。提供的值分别是Rx为0.650米,Ry和Rz都是1.100米。
回转半径与转动惯量的关系 I = M ⋅ R 2 I = M \cdot R^2 I=M⋅R2 其中 I I I是转动惯量, M M M 是质量, R R R 是回转半径。
(注意事项:界面指定回转半径必须用数字指定,不支持公式)
空气动力学
点击“C-Class, hatchback Aero”,进入如下界面
(不做介绍,因为我还没学会)


3. animator画面数据
点击“C-Class, Hatchback”,调整仿真视频video中车辆图像信息(这里


翻译

3. 系统 (没学)
分三个部分:传动系统、制动系统、转向系统
(也不会,之后有需要再学)



4. 前悬挂(没学)
5. 后悬挂(没学)
工况信息设置
carsim支持多种工况,此处是一个120km/h直线的快速开始案例(多种案例还是去“Carsim 2019.0_data"项目文件中)


点击“DLC @ 120km/h (Quick Start)",界面如下

1. 介绍
这个程序展示了一个常见的双车道变换操控测试。
这个例子被用在CarSim快速入门指南中。由于测试时间短(10秒或210米,以先到者为准),并且在动画器中动态动作很容易观察到,因此这是一个常用于评估不同车辆数据的测试。
要查看驾驶员路径是如何设置的,请点击蓝色链接“双车道变换(快速开始)”以获取更多信息。
驾驶员控制指定了一个闭环速度控制,目标速度恒定为120公里/小时,没有制动压力,并使用所有可用的档位进行自动档位选择。
2. 驾驶控制
这里是工况信息的重要部分:速度控制、制动控制、档位控制、转向控制、miscellaneous杂项
速度控制

速度控制一共可以进行一下 7 种设定
- Throttle + initial speed(油门 + 初始速度)
- Open-loop throttle control(开环油门控制)
- Constant target speed(恒定目标速度)
- Target speed vs. time/station(目标速度与时间/站点)
- Target speed vs. station(目标速度与站点)
- Target speed from path preview(从路径预览中获取目标速度)
- Do not specify speed control here(此处不指定速度控制)
制动控制

制动控制主要有以下 3 种方式
- 控制:制动主缸压力(开环)
- 控制:制动踏板力(开环)
- 外部解析文件 (基本用不到)
这里设置的"Constant: 0 Mpa"表示无制动压力,即不制动
制动主缸压力和制动踏板力是汽车制动系统中的两个不同的概念。制动主缸压力是指制动主缸内部产生的压力,当驾驶员踩下制动踏板时,制动主缸的推杆推动主缸活塞使主缸油压升高,制动液便经油管流至四个车轮的制动轮缸,迫使轮缸活塞在油压力作用下外移,推动两制动蹄张开产生制动。而制动踏板力是指踩下汽车制动踏板时所需的力度。这个力度的大小会影响制动效果和驾驶体验。制动踏板力通过制动主缸转化为制动主缸压力,进而传递到制动轮缸产生制动力。
档位控制
(不会,不做介绍)
转向控制
转向控制有许多数据集,
杂项 Miscellaneous
杂项中可以设置很多参数,其中最重要的是 ** Paths and Road Surfaces —— 道路模型 **

道路模型的设置有很多样式,之后在进行讲解
3. 开始和结束条件
设定
- 开始时间和结束时间
- 开始路径位置和结束路径位置
4. 绘图定义
这里对绘制仿真图进行定义,主要是在“Home” —— “Video + Plot” 中plot的图像部分


如图“Video + Plot”中,一共有9个图像,对应的“Plot Definitions”中9个选项设置

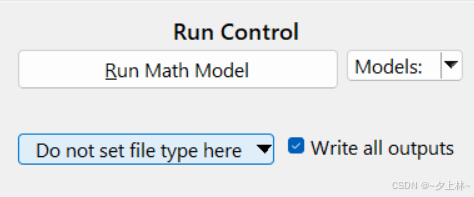
运行控制
在车辆信息和工况信息设置完毕后,点击“Run Math Model”可以进行仿真
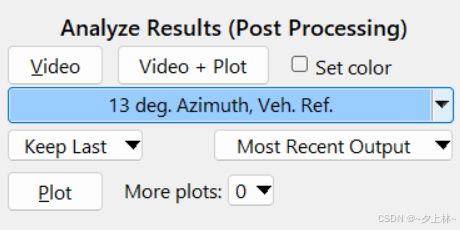
分析结果
运行结果分析有两种模式
- 视频
- 视频 + 图像
(具体的操作步骤看我之前的笔记)

















 5850
5850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









