







 该博客探讨了2023年MathorCup大数据竞赛A题,即基于计算机视觉的坑洼道路检测和识别。文章指出,深度学习技术在解决坑洼图像复杂特征上的优势,通过提取图像的轮廓、纹理和形态等特征提高分类性能。比赛要求参赛者建立高效、准确的模型识别道路是否坑洼,并对模型进行训练和评估。
该博客探讨了2023年MathorCup大数据竞赛A题,即基于计算机视觉的坑洼道路检测和识别。文章指出,深度学习技术在解决坑洼图像复杂特征上的优势,通过提取图像的轮廓、纹理和形态等特征提高分类性能。比赛要求参赛者建立高效、准确的模型识别道路是否坑洼,并对模型进行训练和评估。
国外相关论文,持续更新
自主道路裂缝和坑洼检测
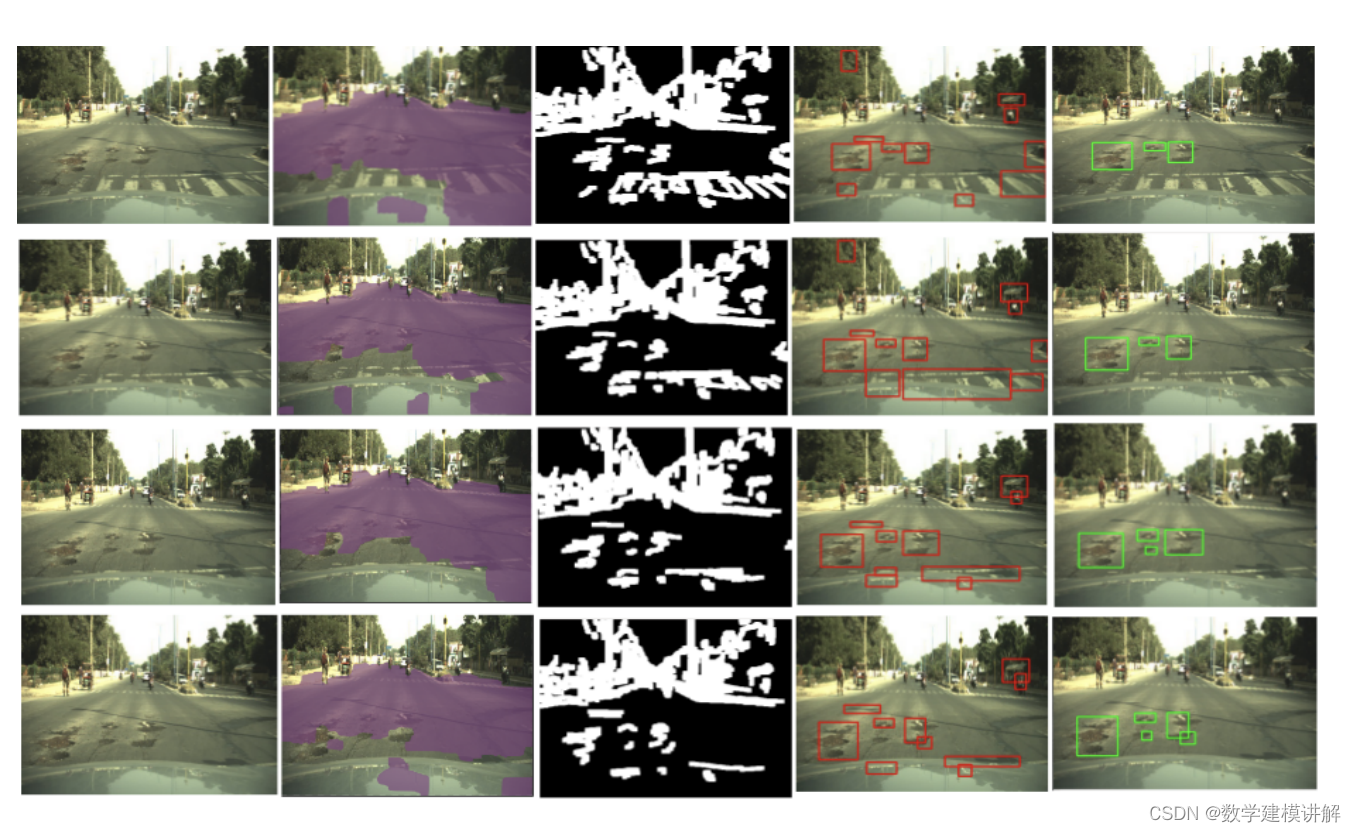
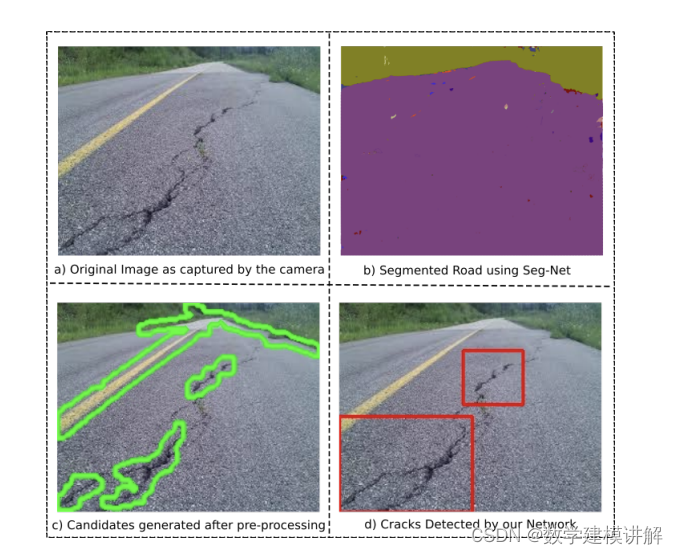
随着自动驾驶汽车和自主机器人的出现,势在必行 检测裂缝和坑洼等道路损伤并执行必要的操作 规避操作,以确保机上乘客或设备的流畅旅程。 我们提出了一种完全自主的实时道路裂缝和坑洼检测 可以部署在任何基于 GPU 的传统处理板上的算法 与关联的摄像机。该方法基于深度神经网络 使用纹理和空间检测裂缝和坑洼的建筑 特征。我们还提出了确保实时性的预处理方法 性能。该方法的新颖之处在于使用基于纹理的功能 以区分裂缝表面和健全的道路。该方法执行 在较大的视点变化、背景噪点、阴影和遮挡方面都很好。这 该系统的有效性显示在标准道路裂缝数据集上

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 896
896

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











