






本篇内容为本人观看视频的学习笔记
RGBD相机的标定和图像配准
kinect2相机简介
三种主要相机类型

常见的RGB-D相机

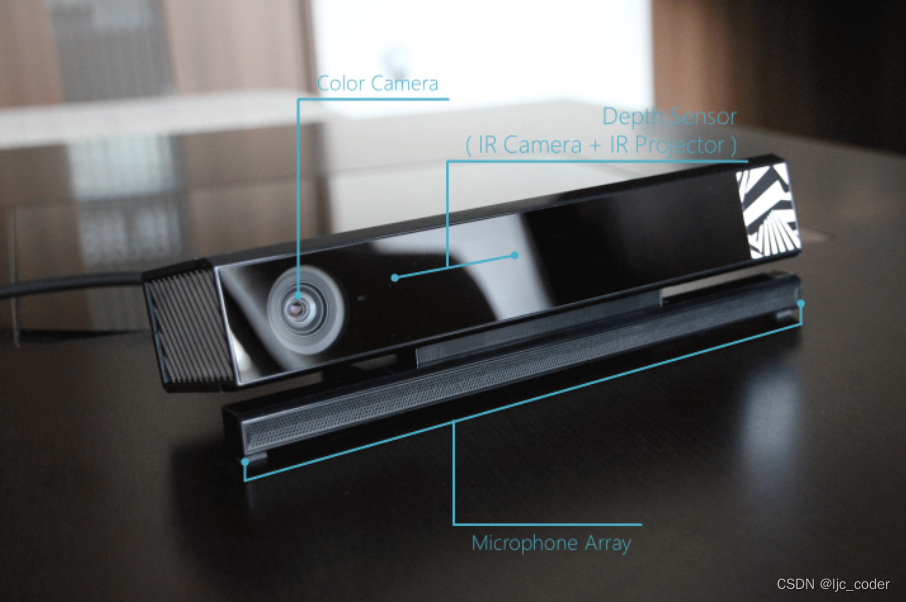
kinect2 相机
- 从左到右依次是:彩色摄像头;红外摄像头(深度摄像头),但这个要和再右边的IR Project(红外投射器)一起工作的;底下的长条是麦克风,可以感受到说话人的方向
使用RGB-D相机的好处
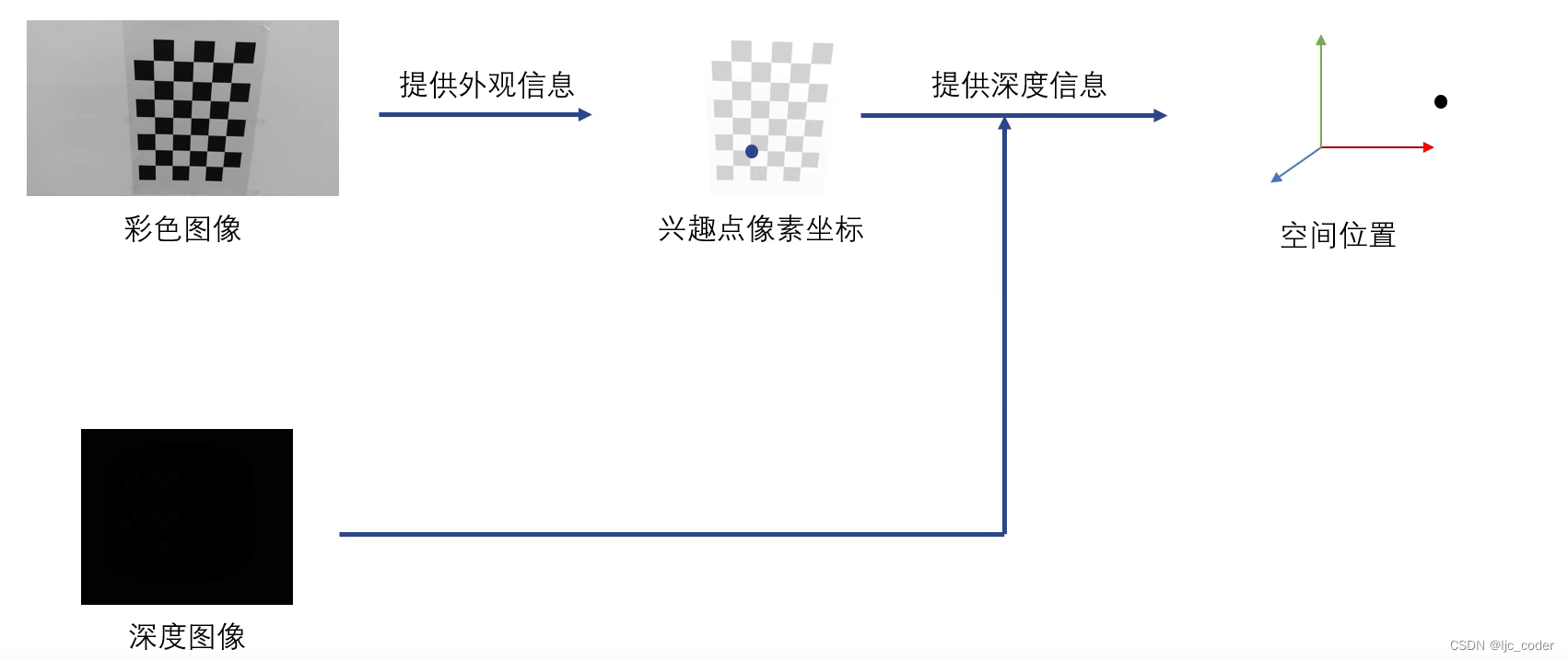
- 可以直接通过拍摄的深度图得到物体的空间位置
问题
- keinect相机 彩色图像是1920x1080的,但深度图是512x414的,因此需要深度校准
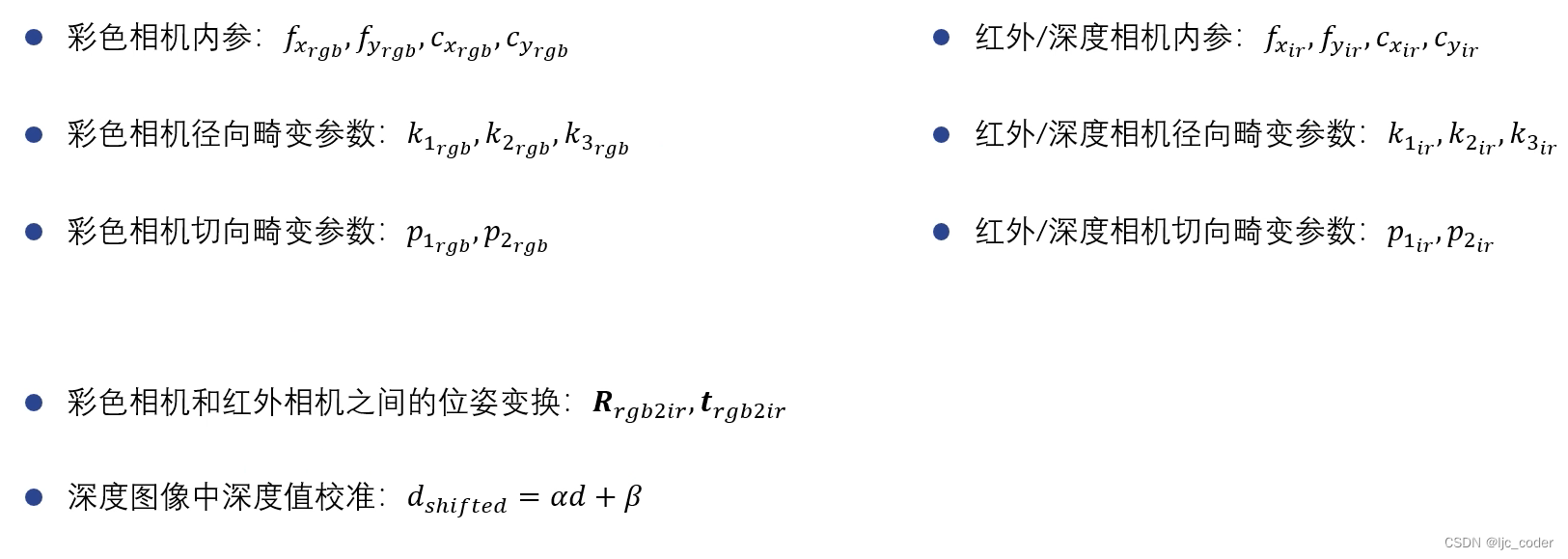
实际标定得到的数据
内外参标定
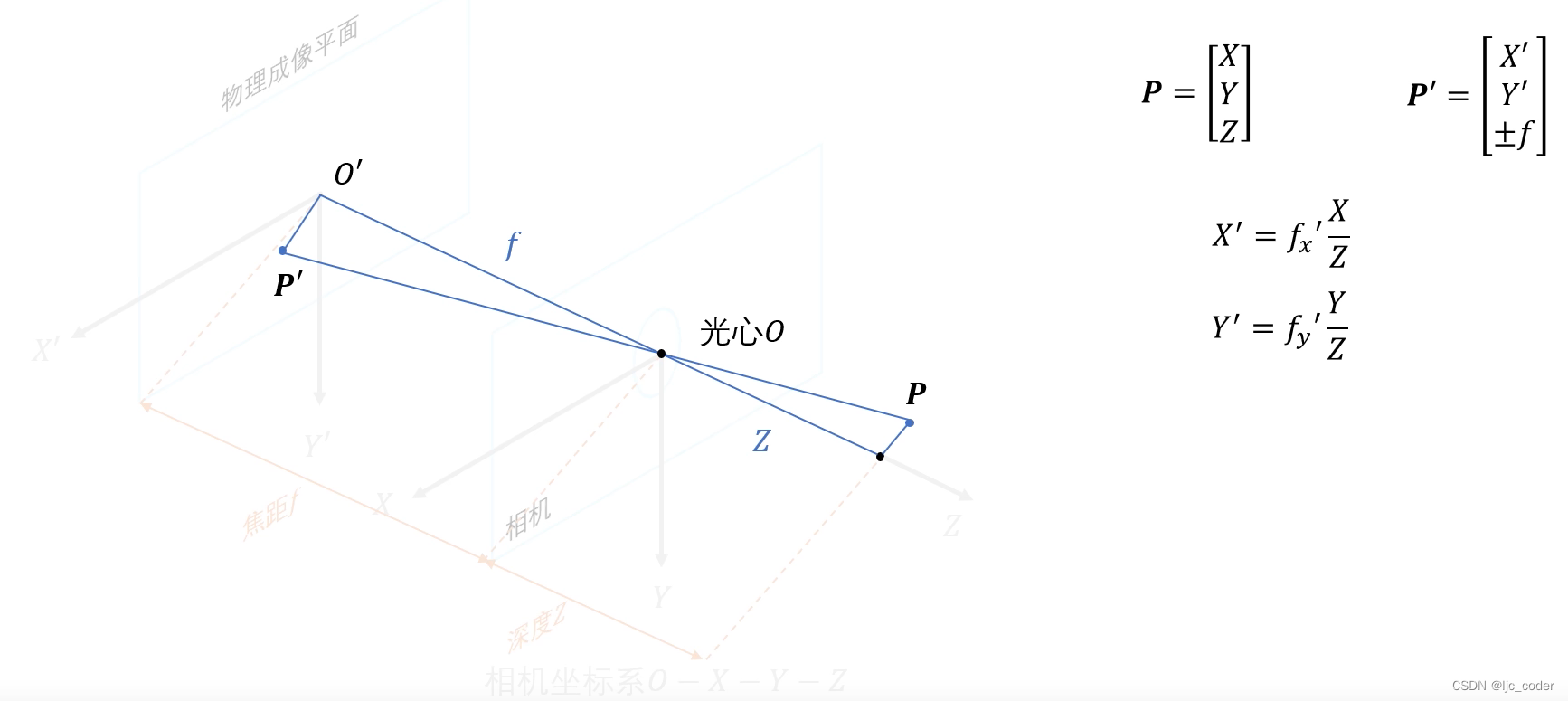
针孔相机投影模型
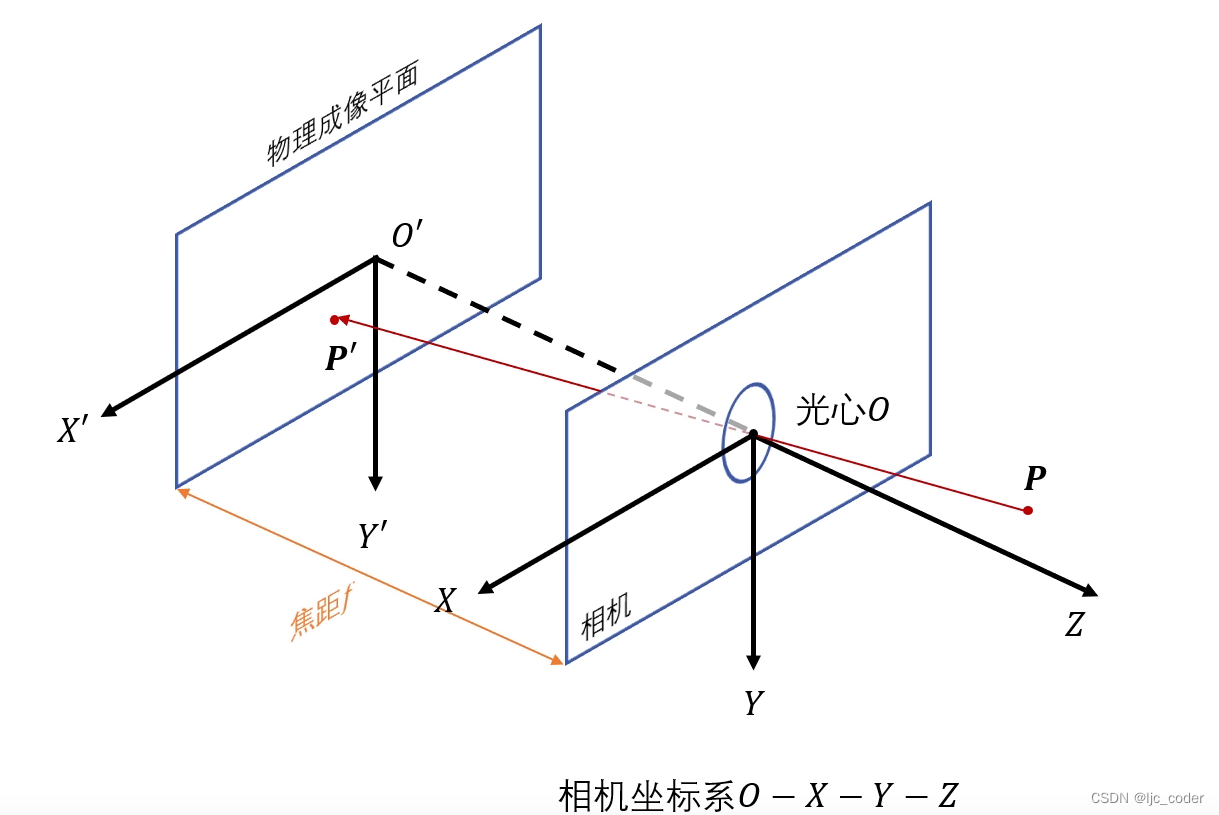
- 相机坐标系 -> 物理成像平面
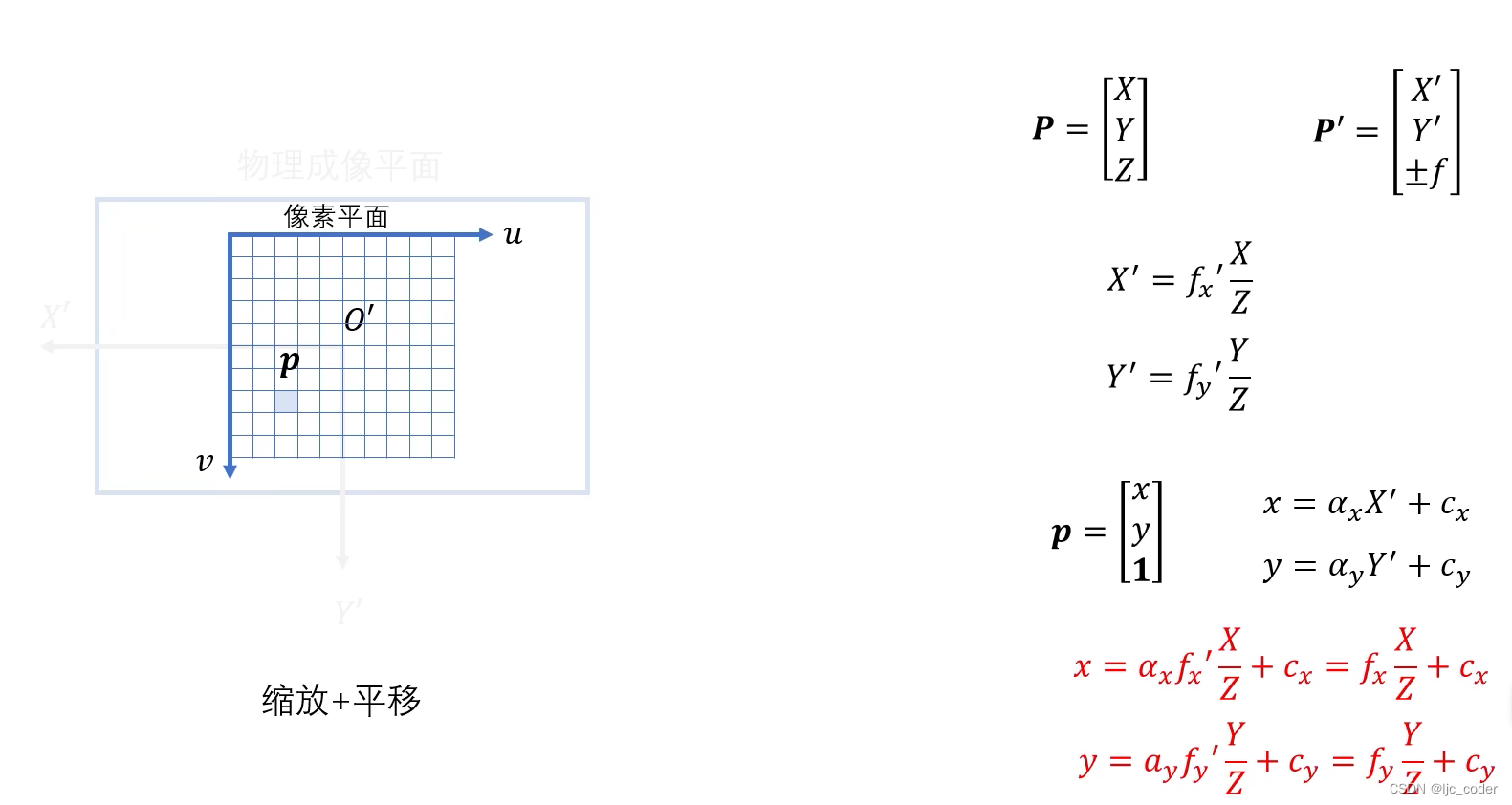
- 物理成像平面 -> 像素平面
- 总结一下
- 整个投影过程都可以通过下面的内参矩阵描述 fx,fy,cx,cy
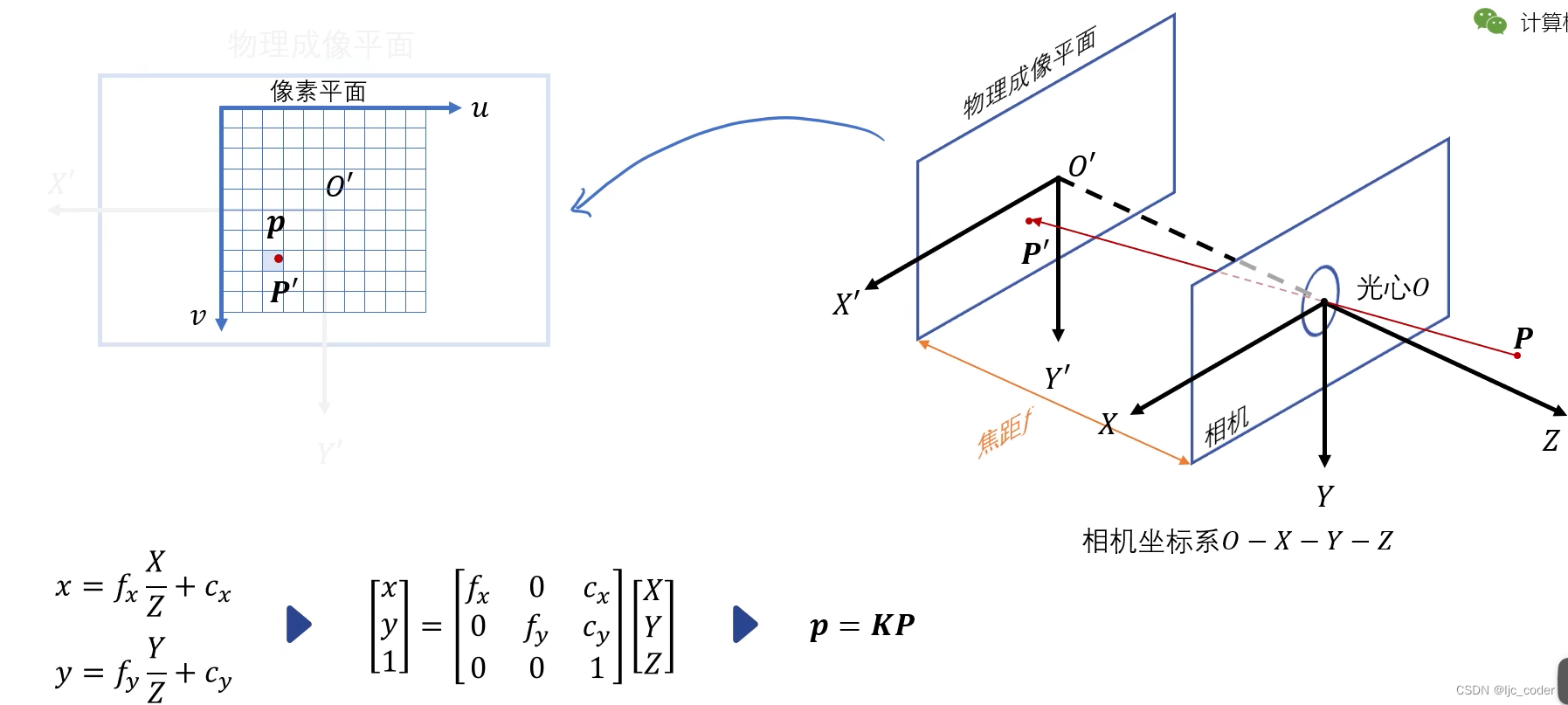
- 整个投影过程都可以通过下面的内参矩阵描述 fx,fy,cx,cy
- 主要通过k1,k2,k3三个参数来描述相机的径向畸变(常用k1,k2就够了)
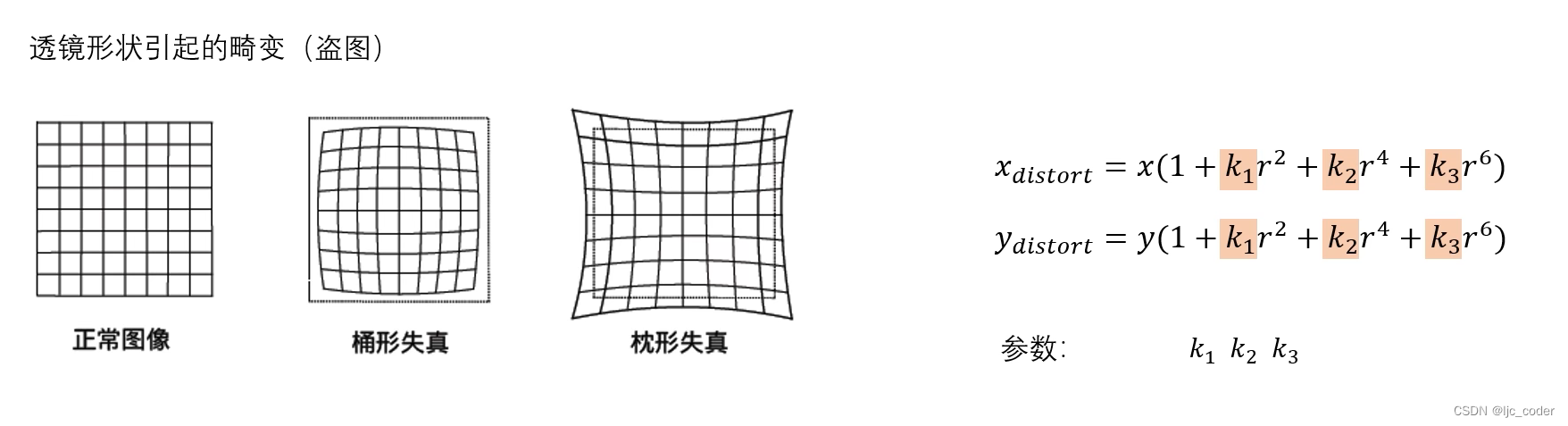
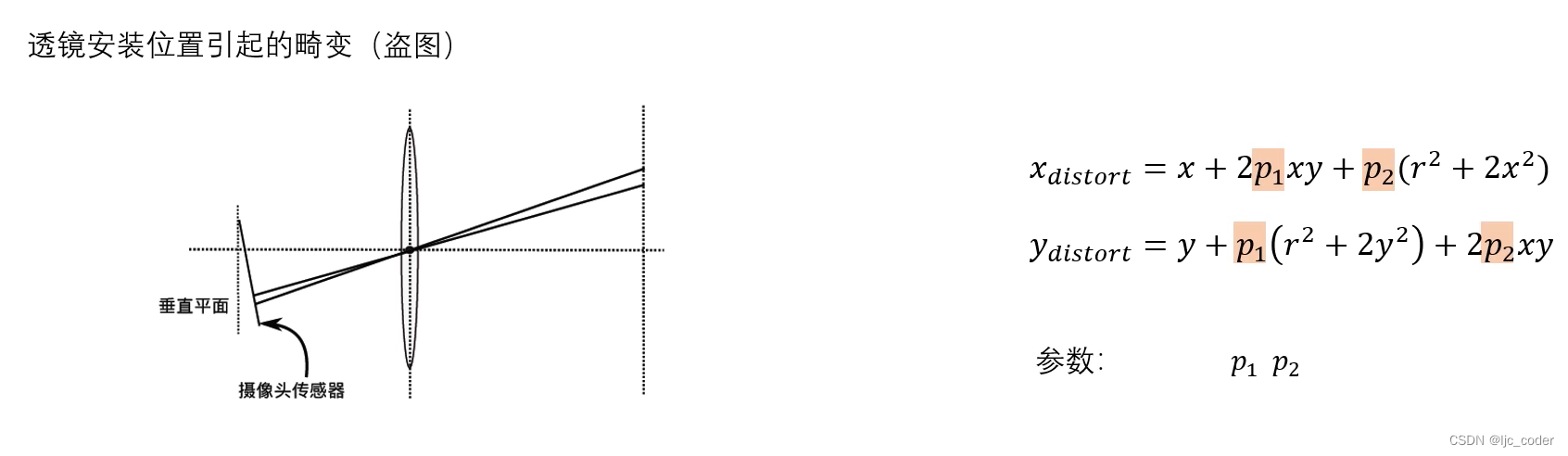
- 对于切向畸变,一般使用p1,p2来描述
工具
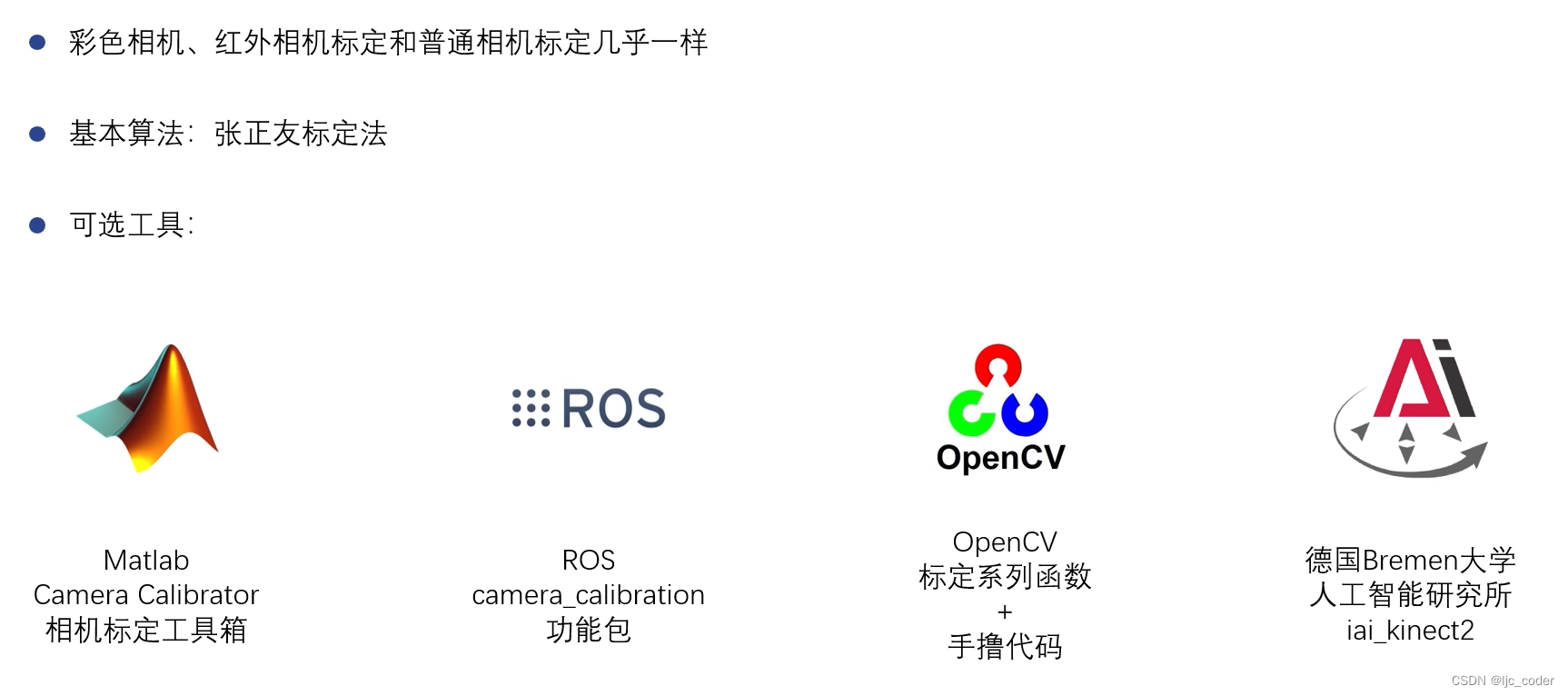
- 对于 kinect 可以用 iai_kinect2 工具包做标定
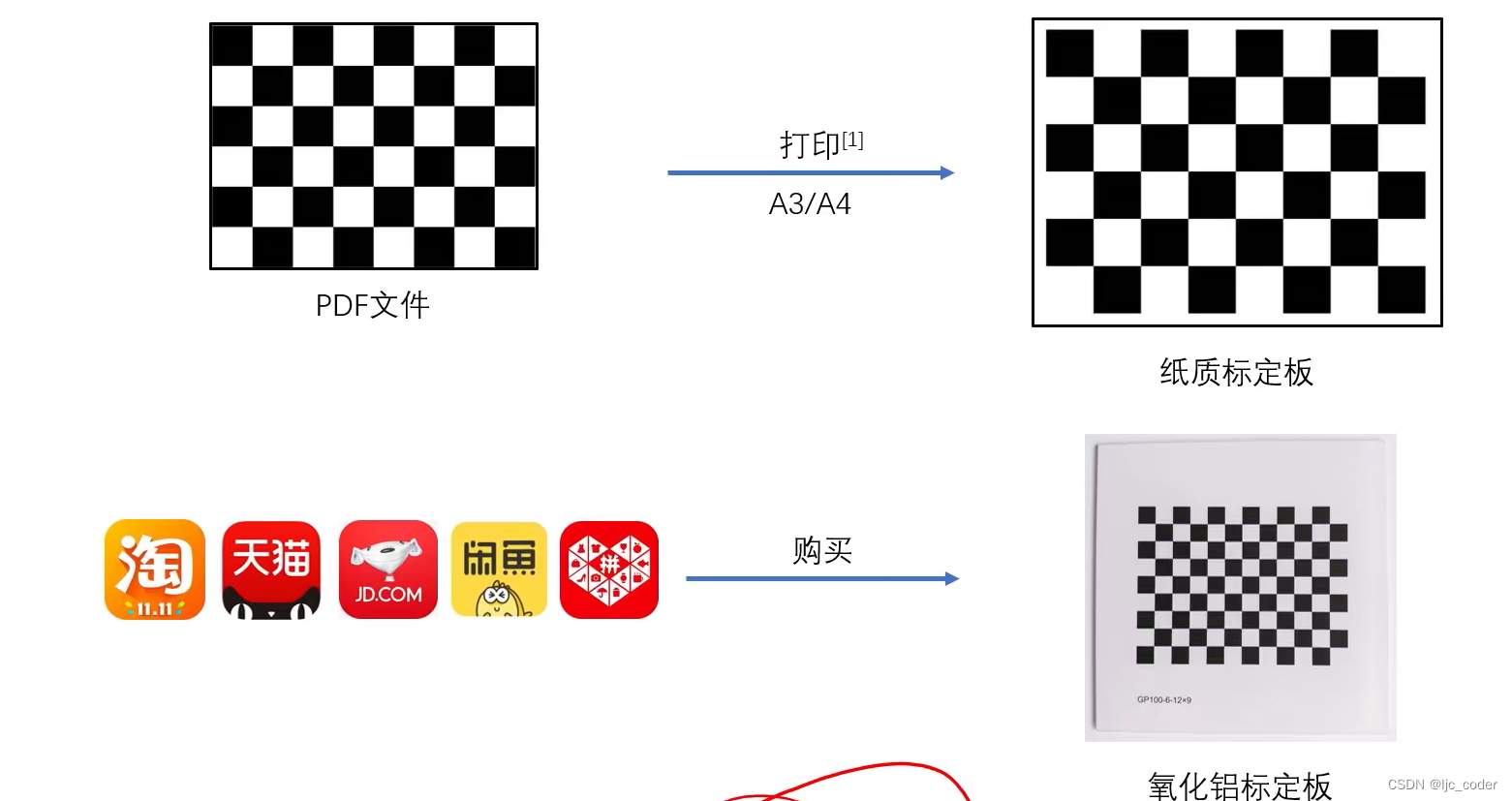
棋盘标定板
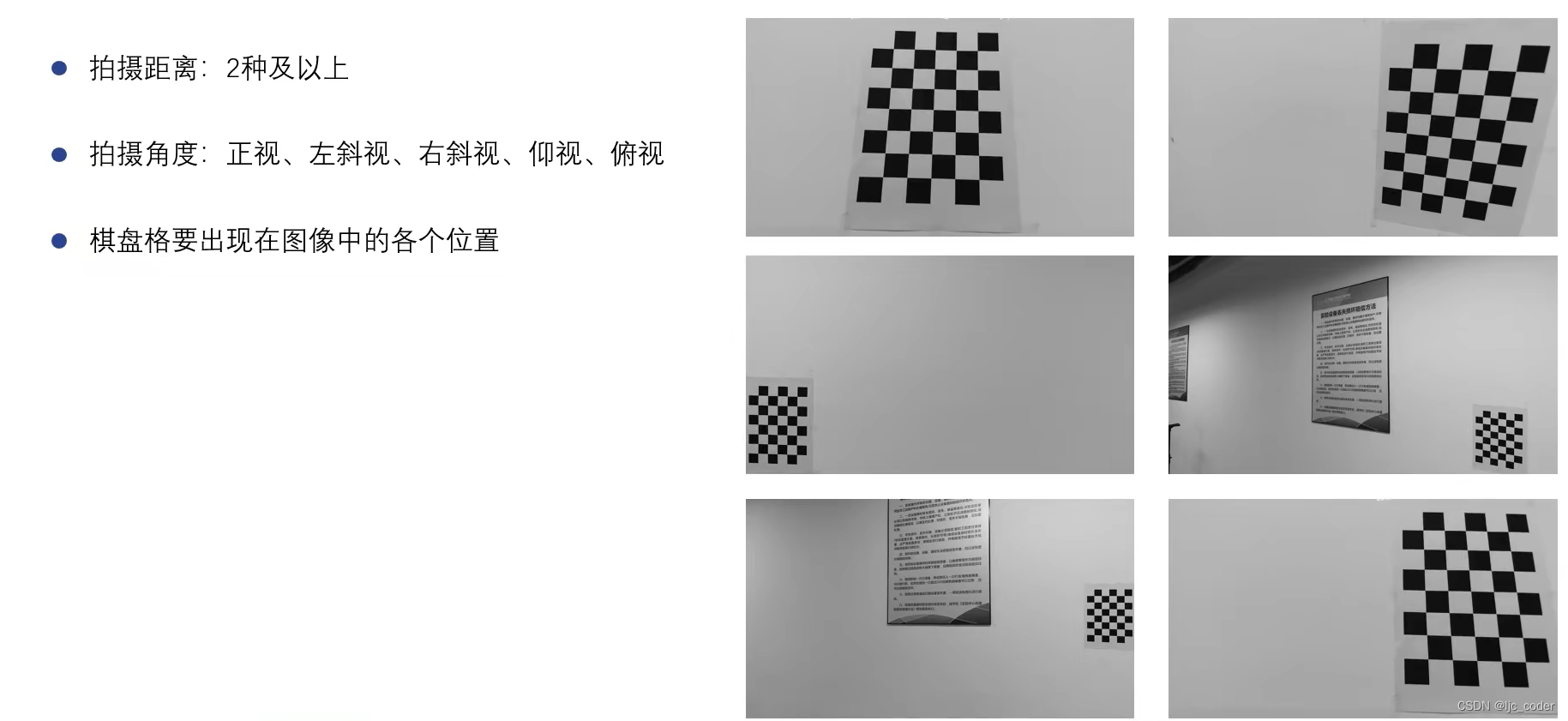
彩色相机标定
红外相机标定
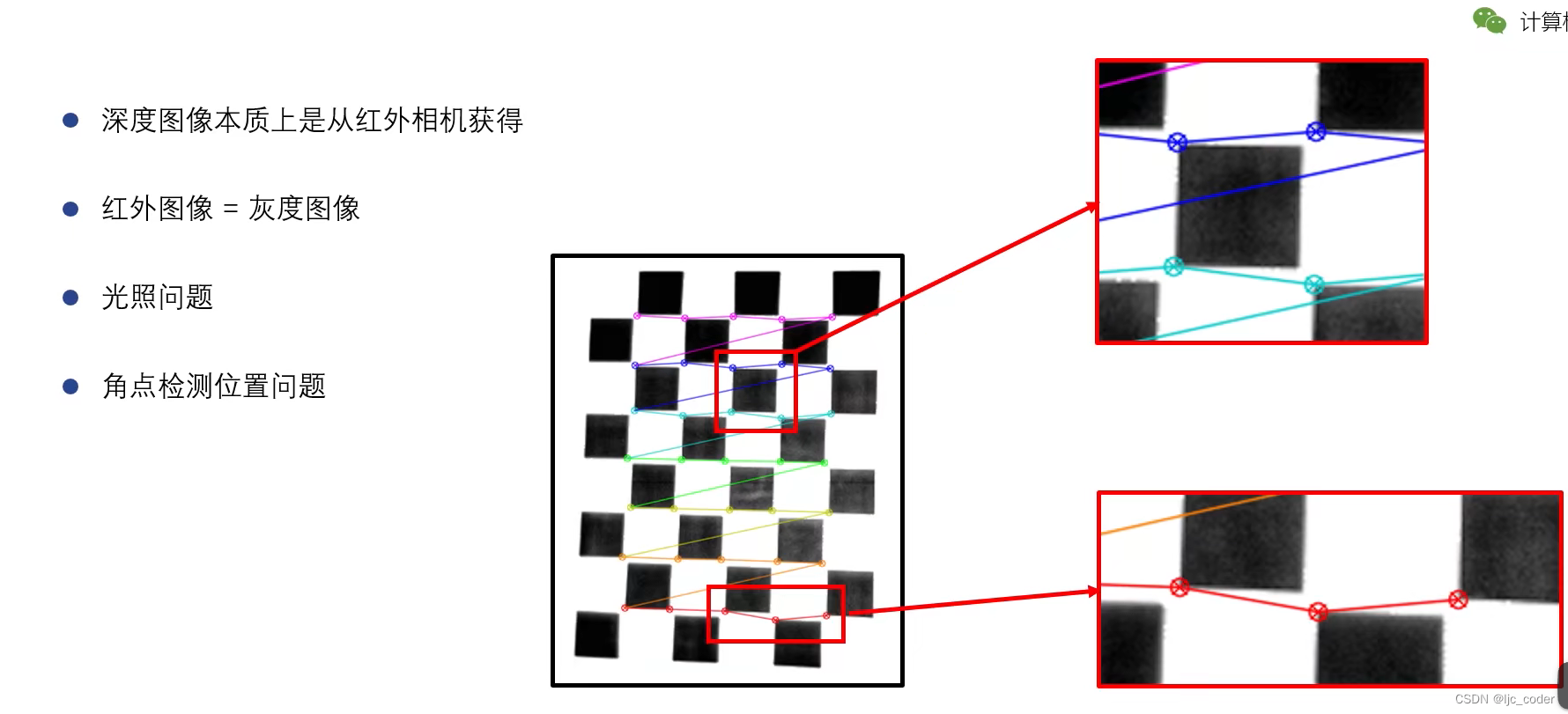
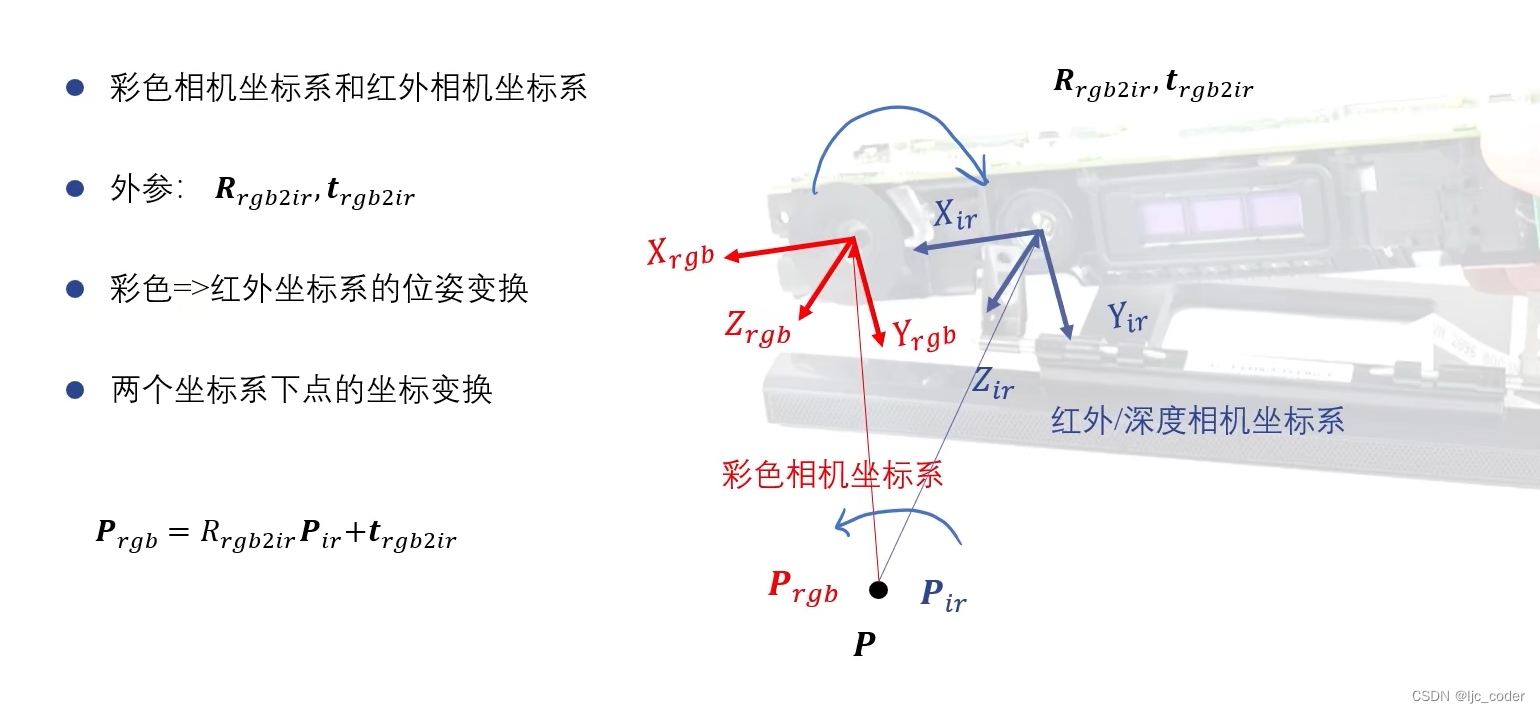
彩色相机和红外相机的外参标定
- 描述深度坐标系下的点如何表示在RGB图中
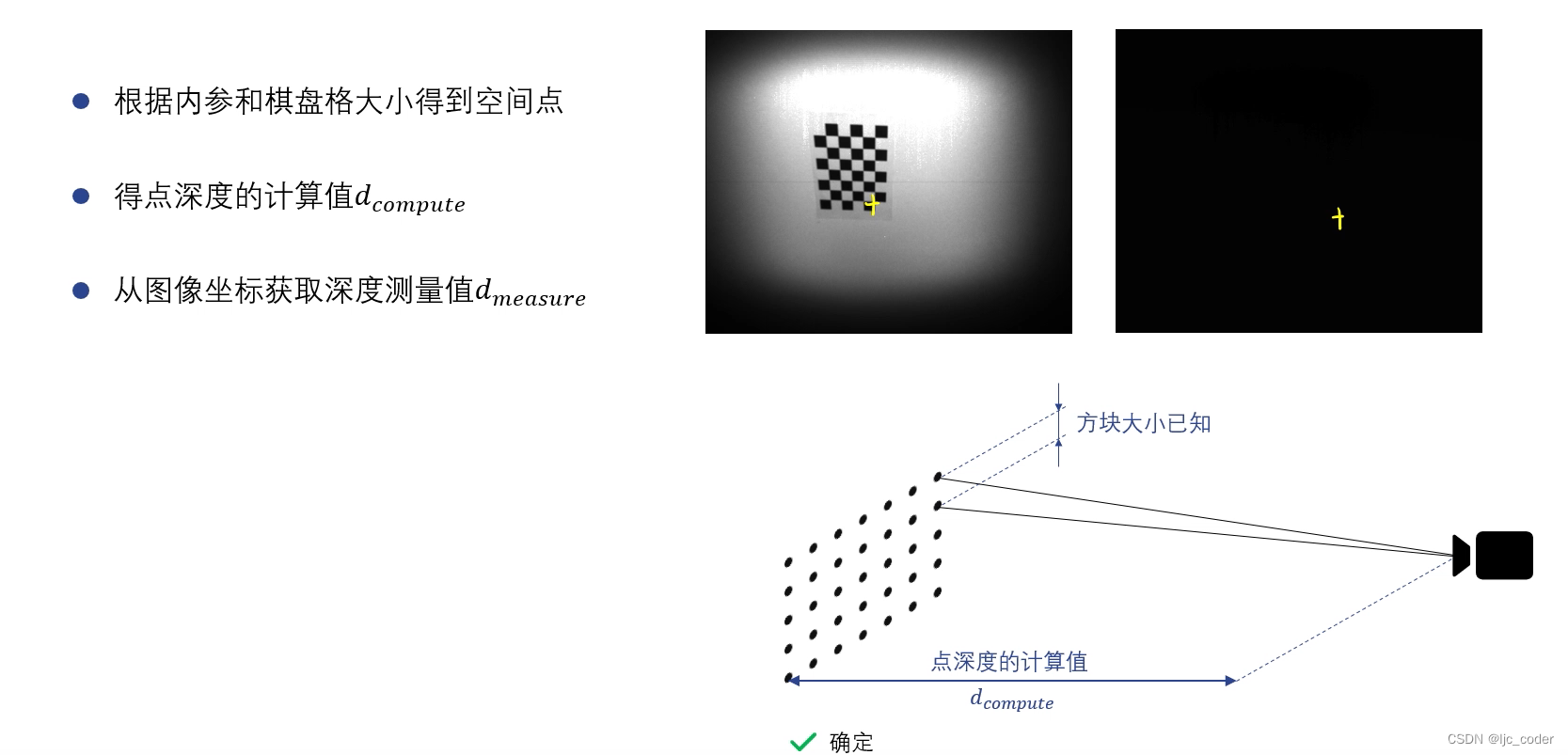
深度相机的深度校准
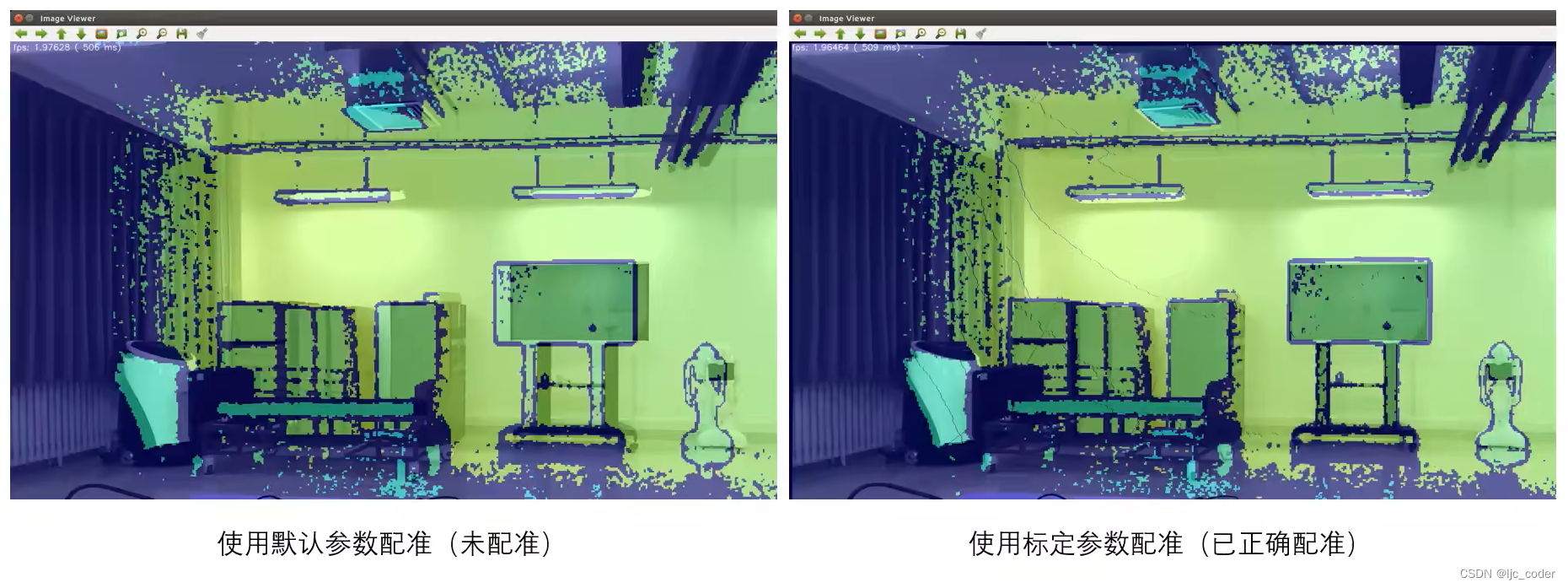
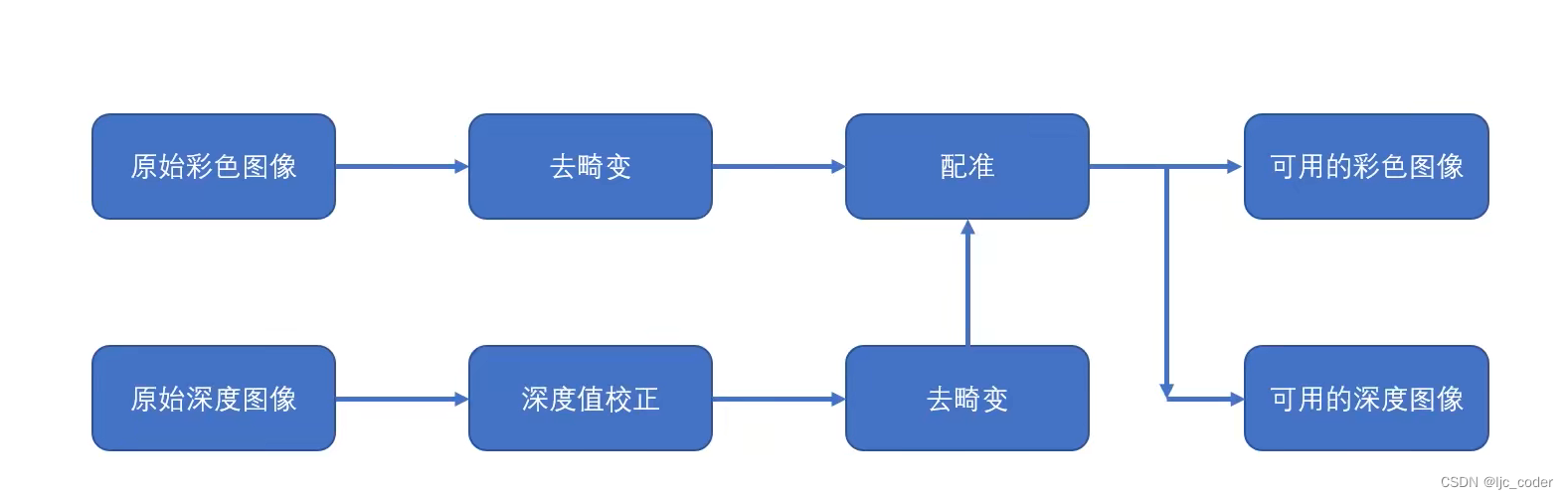
图像配准
配准原理
- (配准后的深度图不对)
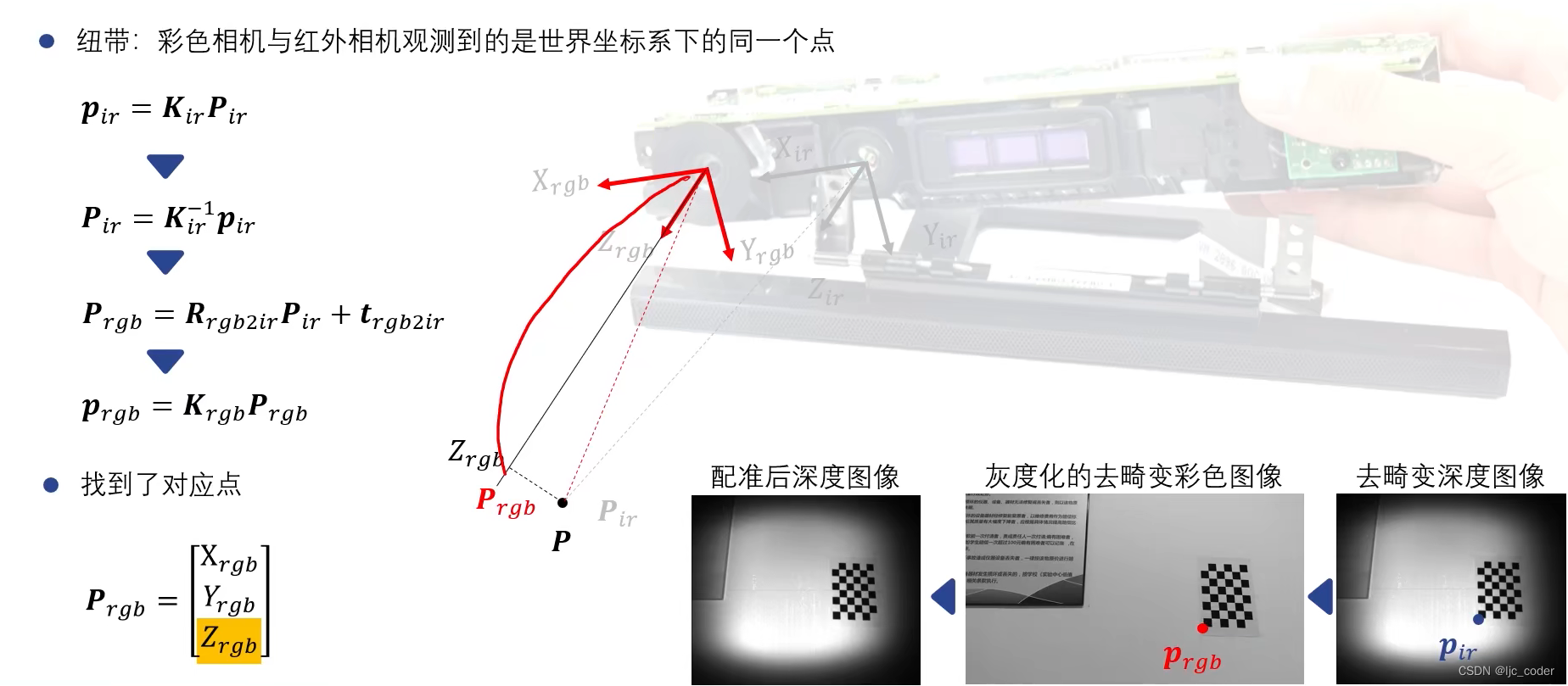
- 正确
总结














 1166
1166











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









