







p54-p58导航网络、蓝图和AI树实现AI随机移动和跟随移动、靠近玩家挥拳、AI跟随样条线移动思路
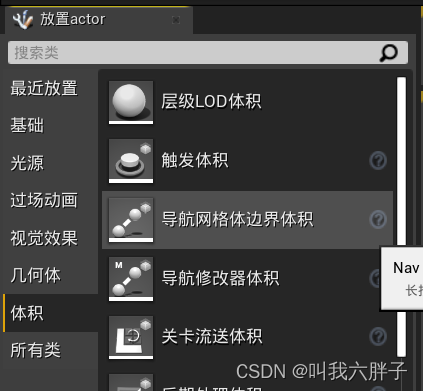
p54导航网格
在体积找到“导航网格体边界体积”拖拽到视图中出现一个线框和绿色覆盖,线框覆盖部分属于AI可以行动范围
快捷键“P”可以显示消失的查看绿色覆盖
绿色导航网格分为静态和动态
静态代表游戏运行之前就已经计算好了AI可以运动的范围
动态代表游戏运行时实时的计算AI可以运动的范围
p55蓝图实现AI随机移动和跟随移动
ctrl+w复制ThirdPersonCharacter,创建的新蓝图类重命名为AI
新建文件夹AI,把蓝图类AI放到新文件夹AI中
打开蓝图类AI,删掉蓝图、遍历、摄像机、其他事件图表
AI Move To(AI进行移动)
作用:让AI进行移动

Pawn:连接(使其移动的)对象(一般都连接self(获得一个对自己的引用))
Destination:(将要移动到的)目标
Target Actor:跟踪(某个角色)移动(如果连接的是玩家,就会一直跟着玩家跑)(和Destination选择一个使用,区别为Target Actor传入的是演员,Destination传入的是向量)
Acceptance Radius:走到目标的多少范围
Stop on Overlap:大勾后Acceptance Radius变成了走到目标的多少范围停止
成功时:AI到达目的地成功时触发
失败时:AI到达目的地失败时触发
创建新的自定义事件“AI移动”连接输入执行引脚
Pawn连接self
Destination拉出引线搜索Get RandomPointln Navigable Radius(获取可导航半径内的随机点)
Get Random Pointln Navigable Radius(获取可导航半径内的随机点)

Origin:(需要传入一个圆心)在此圆心范围内找到一个点
Radius:半径范围数值
Origin拉出引线搜索“获取Actor位置”
创建事件开始运行,拉出引线连接事件AI移动
蓝图如下
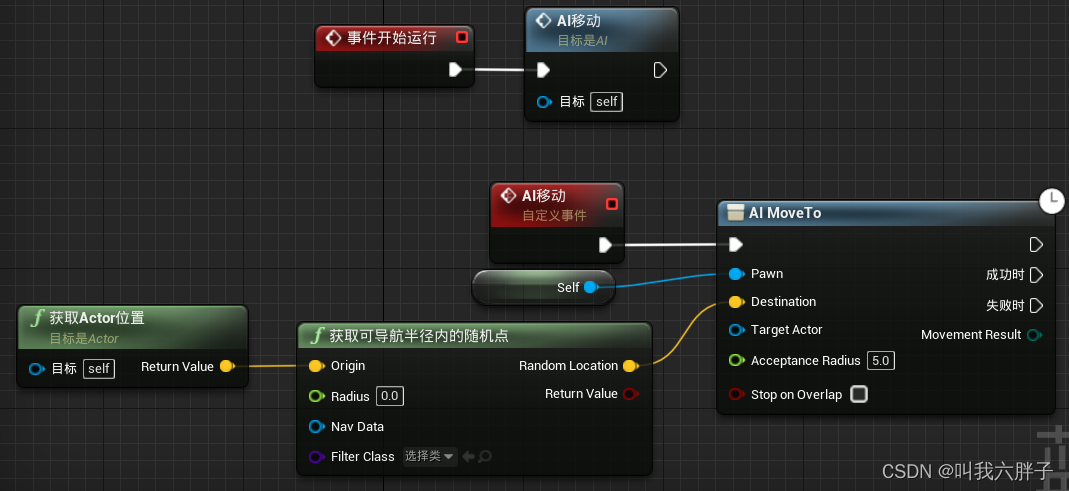
现在AI会在以自身为半径的Radius范围内随机选一个点移动,之后就会停下,当前目的需要AI在移动到一个点后再次移动
Set Timer by Event(以事件设置定时器)
Time:可以设置时间
Looping:循环(打勾即会循环)
Random Float in Range(范围内随机浮点)
如图连接蓝图
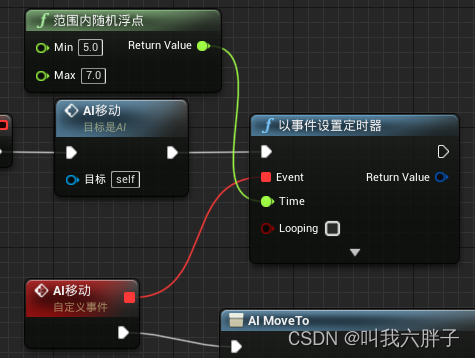
如此,每过5到7秒触发一次时间AI移动,循环(如果AI还没到目的地时间就到了,AI会选择向新的点走去)
p56AI树实现AI随机移动和跟随移动
右键内容浏览器-》人工智能-》黑板
右键内容浏览器-》人工智能-》行为树
右键内容浏览器-》蓝图类-》搜索AIController(AI控制器)(这是所有AI控制器的父类)

AI_BP可以看作是傀儡,AI_BT控制AI_BP,行为树控制AI的行为,黑板存储变量
在黑板新建两个变量,一个bool变量重命名为“是否看到玩家?”,另一个是向量重命名为“要去的坐标”
打开AIController,在组件面板添加“AI感知组件”(作用是让AI感知周围的敌人友军等)
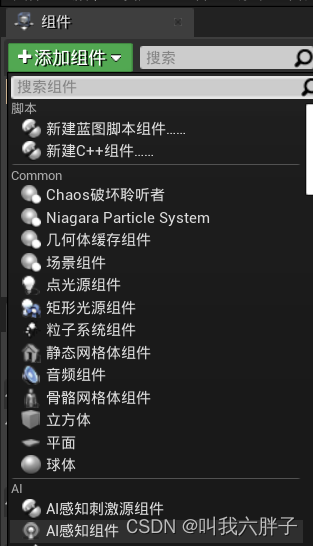
点击AIPerception(AI感知组件),在细节面板找到“AI感知”点击“感官配置”右侧的加号

有许多配置,选择视力配置
实力配置可以修改如下参数

次要视觉半角角度:AI的视力范围
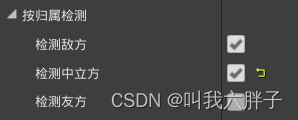
按归属检测中的中立方要打勾,这样才可以检测到玩家(如果想要更改敌友等需要更改c++代码)
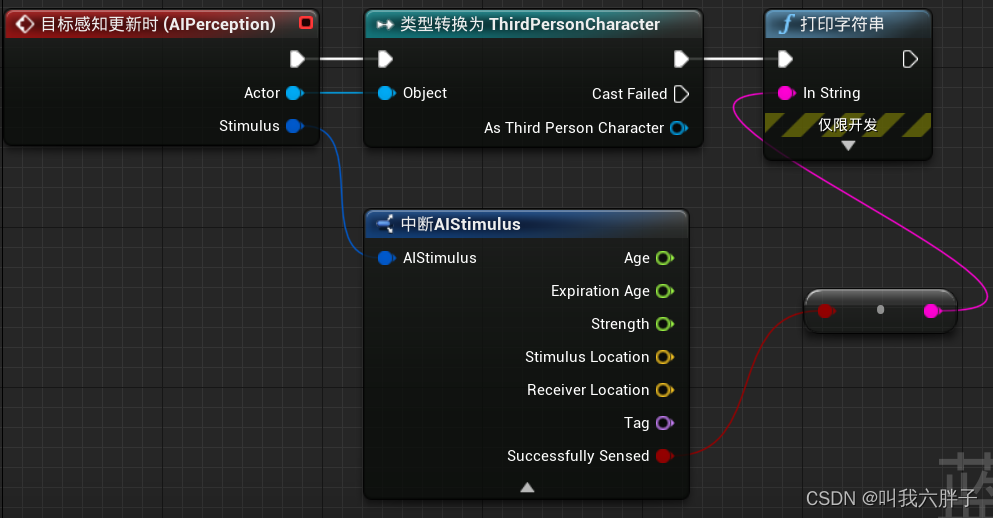
目标感知跟新时(AIPerception)(On Target Perception Updated(AIPerception))

Actor:AI看到(因为之前选的视力配置)的”Pawn和角色蓝图类“会传到此处
Stimulus:刺激物
Actor拉出引线搜索”类型转换为ThirdPersonCharacter"(类型转换的作用是只有看到小白人才会响应之后的逻辑)
Stimulus拉出引线搜索“中断AISimulus”
中断AISimulus(Break AISimulus)
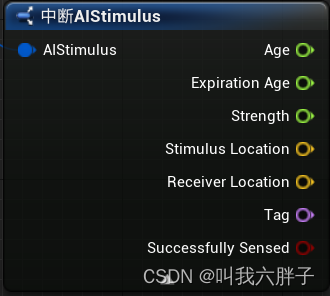
Successfully Sensed:是否成功感测到了小白人
如下图连接蓝图,进行测试
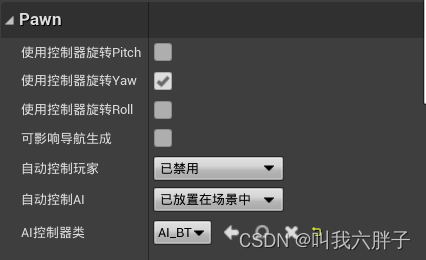
想要进行测试还需要打开AI_BP,在细节面板-》Pawn-》AI控制器类-》选择AI_BT(刚才的AIContoller)

编译保存
如此在游戏中出现在AI视野范围内左上角会出现true,走出AI视野会在左上角出现false
AI行为树

从根拉出的Composites:复合节点(用于分支的规则)
Selecter:选择,几选一……
Sequence:序列,按顺序进行
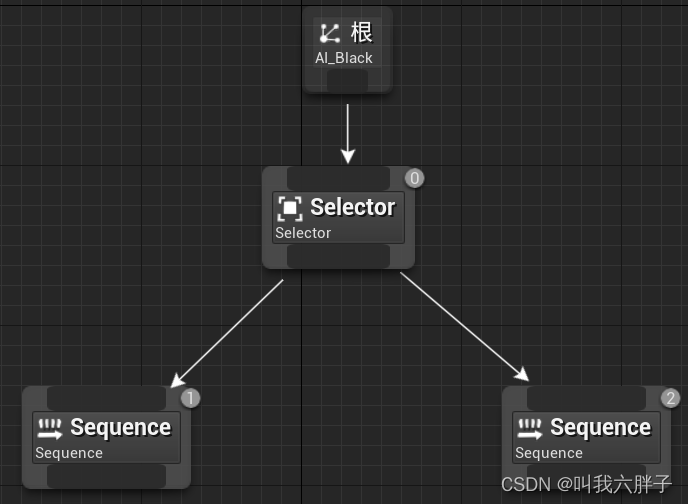
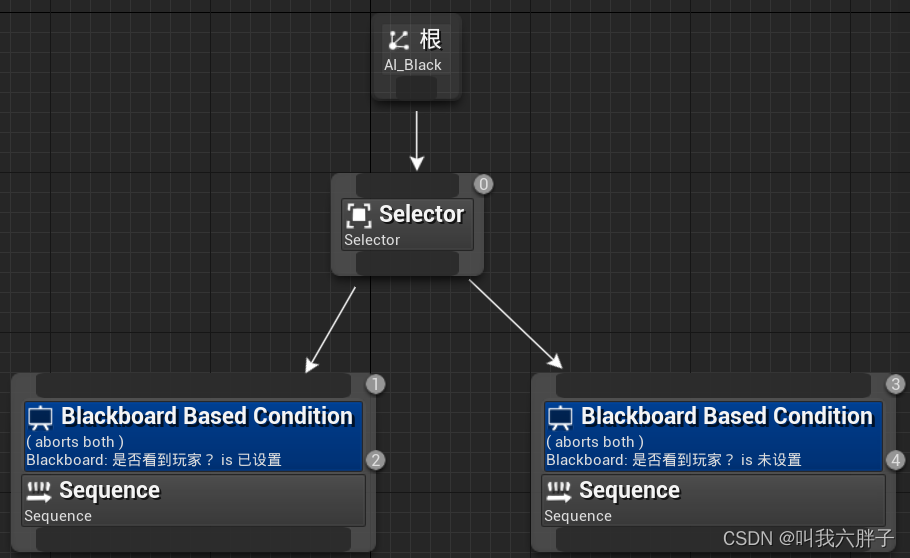
因为目的是AI看到玩家冲到玩家身边挥拳,所以先连接Selector根据有没有看到玩家而判断,接下来连接Sequence(如果看到了玩家依次进行什么动作)
如下图连接
在左侧Sequence右键添加装饰器,选择黑板Blackboard(调用了黑办里的变量)
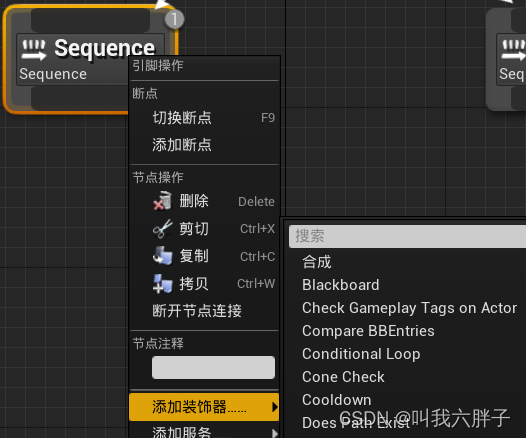
在右侧细节面板选择要调用的变量“是否看到玩家?”

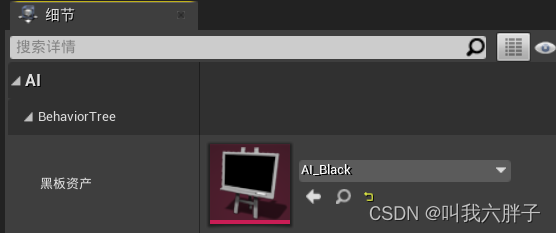
当黑板太多时,点击空白处,在细节面板可以选择使用的黑板
右侧Sequence也添加装饰器黑板,在细节面板-》黑板-》键查询-》未设置,黑板键选择变量“是否看到玩家?”
(选择未设置就代表未看到,已设置就是看到)

现在设置优先级(使其优先级相等)点击Sequence的黑板,在细节面板-》流控制-》观察器终止-》Both
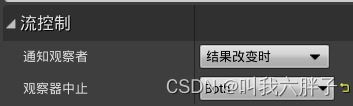
两个都如此设置,现在两个在同一优先级
在AI_BT的事件图表右键搜索“获取黑板”拉出引线搜索“将值设为布尔”,此时“将值设为布尔”出现Bool Value节点,连接中断AIStimulus蓝图的Successfully Sensed节点
从Key Name拉出引线搜索“创建文字命名”,在“创建文字命名”写上“是否看到玩家?”
如此就可以实时的传递bool值“是否看到玩家?”了
现在行为树的规则有了,但是还没有内容,接下来添加内容
点击左上角新建任务,选择BTTask_BlueprintBase(如果没下拉,选择即可)
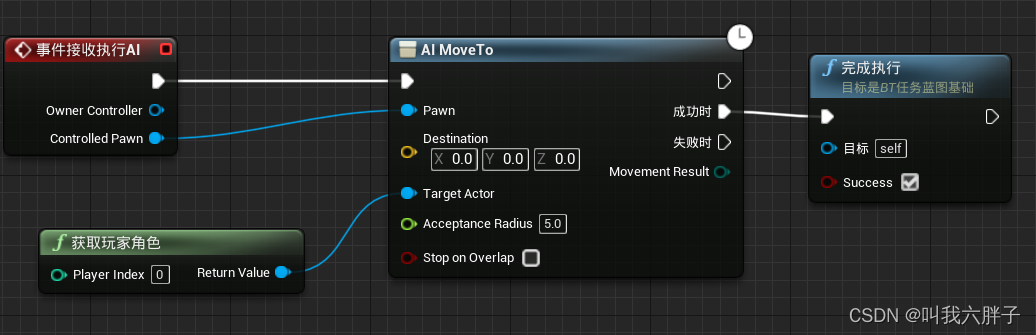
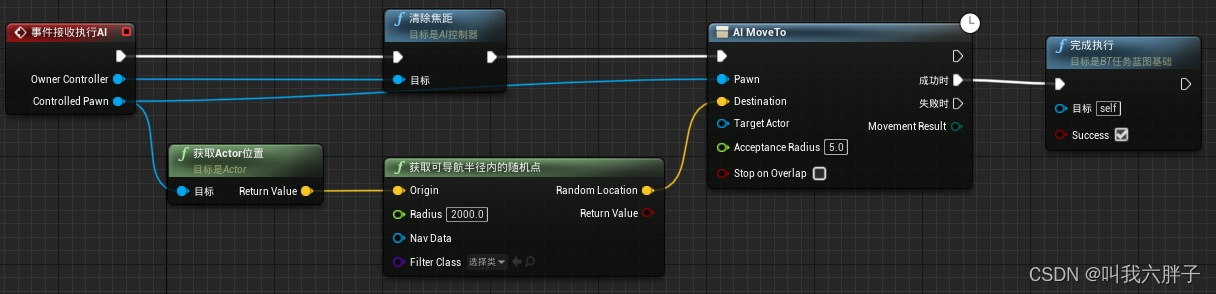
在新建的任务(蓝图)在左侧我的蓝图,点击函数右侧的重载“事件接收执行AI”

删除之前创建的蓝图实现随机移动的蓝图
如图在新建的任务如下图链接
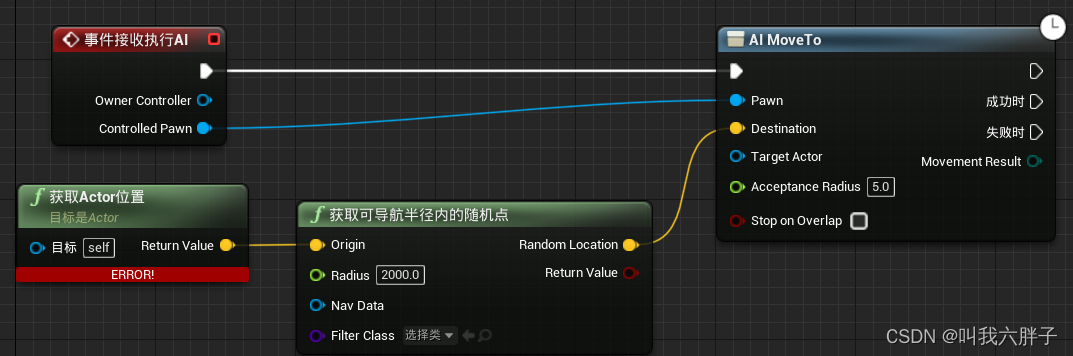
Comtrolled Pawn连接AI Move To的Pawn(这一步是连接AI控制器的对象)
AI Move To的成功时连接”完成执行“(Finish Execute)(这一步是让AI在执行完成后告诉系统到底是成功还是失败了,才能进行下一个任务)(不要忘记给完成执行的bool打勾)
(必须在完成任务时让编译器知道,不然就不会做任何事了)
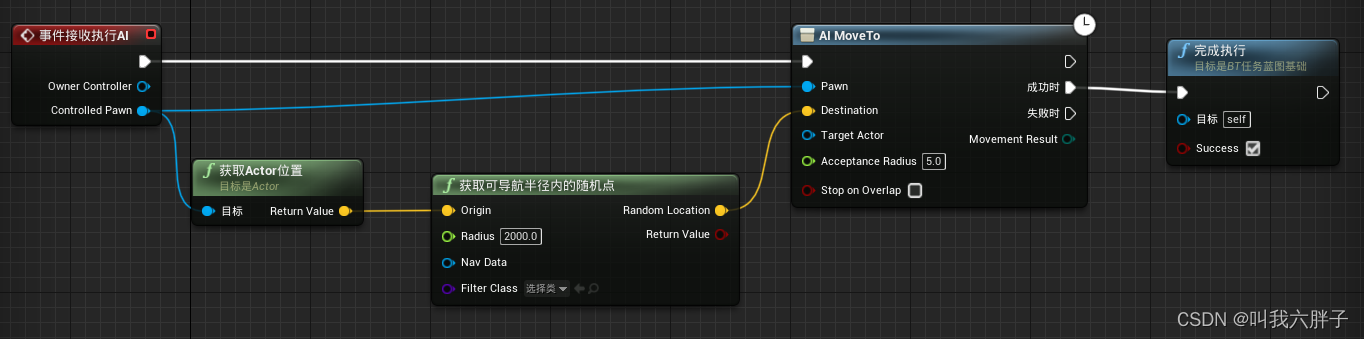
这是随机找点的逻辑,逻辑写完该让行为树调用了
在右侧行为树”没看到玩家时“拉出搜索”随机找点_BP“(刚才新建的任务的重命名)
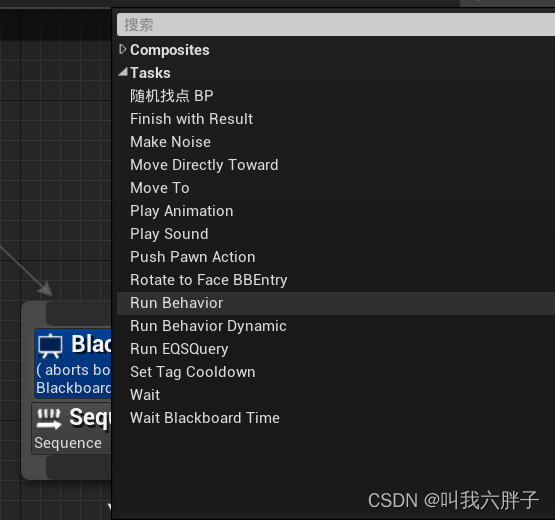
再添加一个Wait。设置为5秒,这样就会,找个点,待5秒,再找个点,待5秒,如此循环
现在行为树还没有和AIController产生联系
在AIController的蓝图中创建”事件开始运行“,连接”运行行为树“
在”运行行为树“的BTAsset选择对象行为树”AI_BT“

在AI_Tree新创建一个任务”寻找玩家_BP“,重载”接收执行AI“如图连接
现在AI会一阵跟着玩家,但是很容易视野丢失玩家就会跑开
解决办法:让AI看到玩家后一直朝向玩家
打开AI小白人蓝图,在组件选中角色移动,在细节面板搜索朝向,取消勾选

选中类默认值,在细节面板找到Pawn-》使用控制器旋转Yaw

打开寻找玩家_BP,搜索”设置焦距“目标连接Owner Controller,New Focus连接Return Value
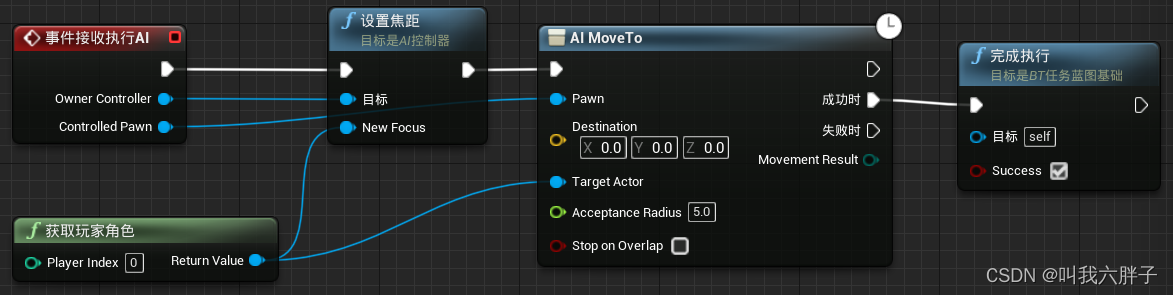
控制AI旋转方向的是设置焦距的New Focus,New Focus连接获取玩家角色,就会一直看向玩家角色方向
使用焦距后AI会一直朝向玩家,会在还没看到玩家的时候斜着走等等
所以需要在没看到玩家时关掉设置焦距
在随机找点_BP中创建清除焦距蓝图,如下图连接
p57靠近玩家挥拳
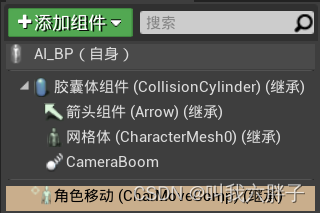
给AI添加一个碰撞盒子(Sphere Collision)调整大小
点击Sphere,在细节面板点击两个蓝图(组件开始重叠时(Sphere)、组件结束重叠时(Sphere))的加号创建蓝图
蒙太奇
蒙太奇就是多个动画或片段剪辑组合在一起,通过程序驱动播放某一个片段
点击组件面板的“网格体(CharacterMeshO)”拖出,拉出引线搜索“获取动画实例(Get Anim Instance)”,拉出引线搜索“蒙太奇播放(Montage Play)”
(蒙太奇播放的目标是动画实例,所以先创建前面两个蓝图。因为要让“网格体(CharacterMeshO)”里的模型播放动画,所以选用“网格体(CharacterMeshO)”来连接)

为蒙太奇播放添加一个动画
可以通过调节In Play Rate而更改动画播放时间
返回值是直接获取动画的长度,练到time效果如下:
当播放蒙太奇的同时,触发计时器,计时器开始倒计时,时间为蒙太奇的总时间,倒计时结束时,正好是动画播放完,触发自定义事件,就会再一次播放动画,触发计时器,勾选looping之后,就会如此重复播放动画
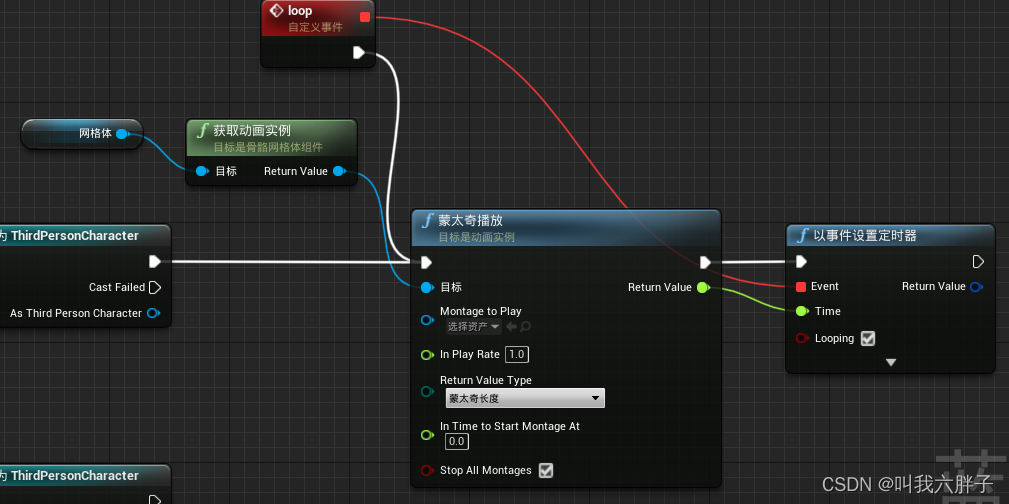
以事件设置定时器的Return Value拉出引线搜索“Clear and Invalidate Timer by Handle(以句柄清除定时器并使之无效)”
按上述路径打开,复制第一个,在AI文件夹复制并改名“AI_AnimBP”(以防和玩家的混掉)
打开AI_BP蓝图,点击组件面板的“网格体(charaMeshO)(继承)”在细节面板的动画-》动画类。选择刚才命名的“AI_AnimBP”

双击打开“AI_AnimBP”
双击左侧动画图表的AnimGraph

两个连线之间添加一个插槽“DefaultSlot”
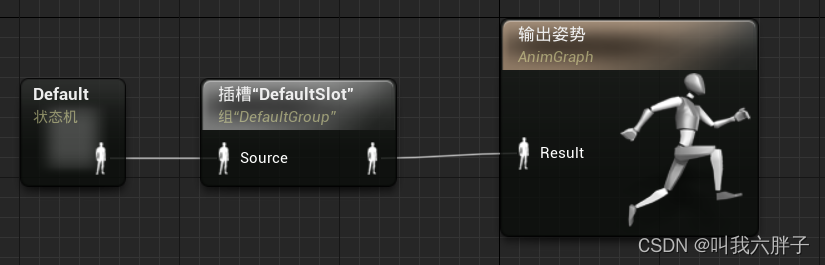
插槽的作用相当于标签(分类),为了更好的识别
完整蓝图如下

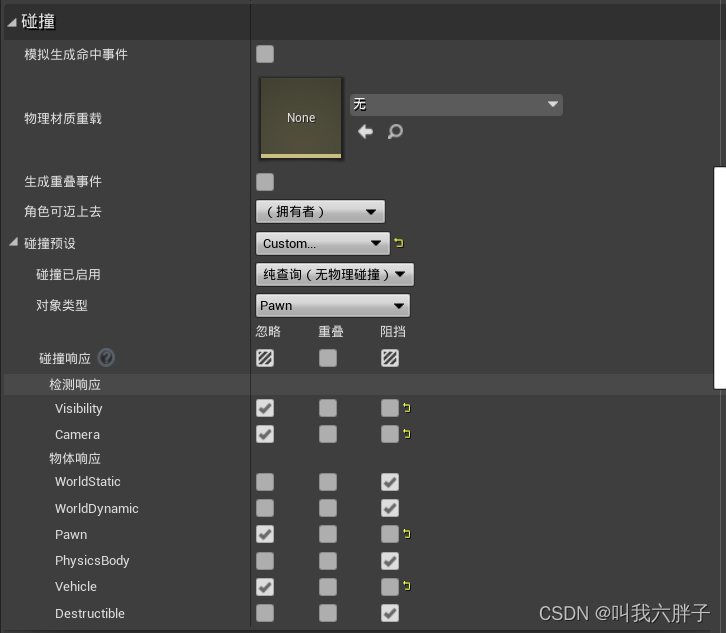
现在拳头靠近玩家摄像机时会被阻挡,所以进行如下操作
打开蓝图AI_BP,选中网格体-》在细节面板-》碰撞-》碰撞预设改为Custom-》Camera勾选忽略
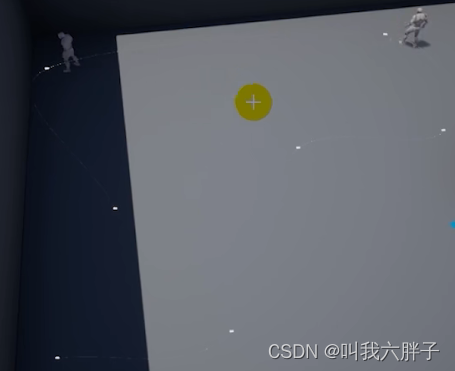
p58AI跟随样条线移动思路
如图,随着点走
新建一个Actor蓝图类
在添加组件添加“样条组件”
拉出蓝图到视口会出现下图

选中左侧点,按住Alt键拉动可以快速创建一个点

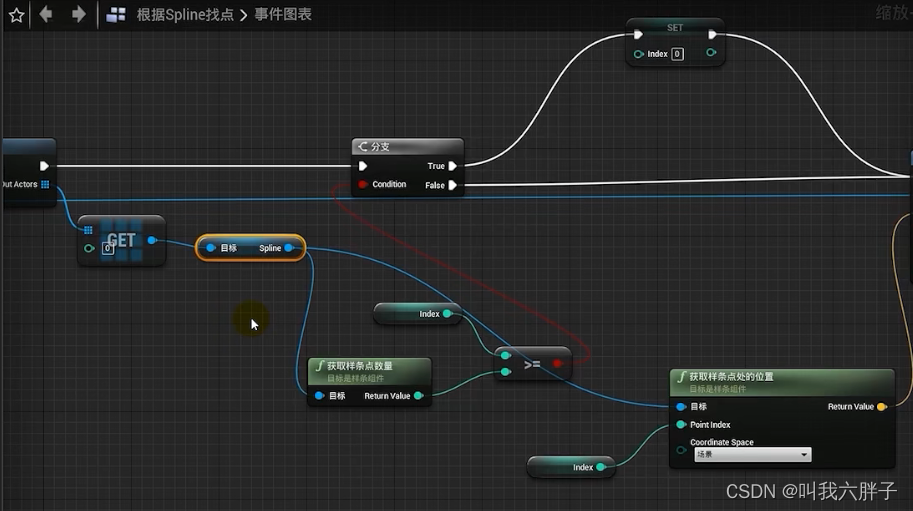
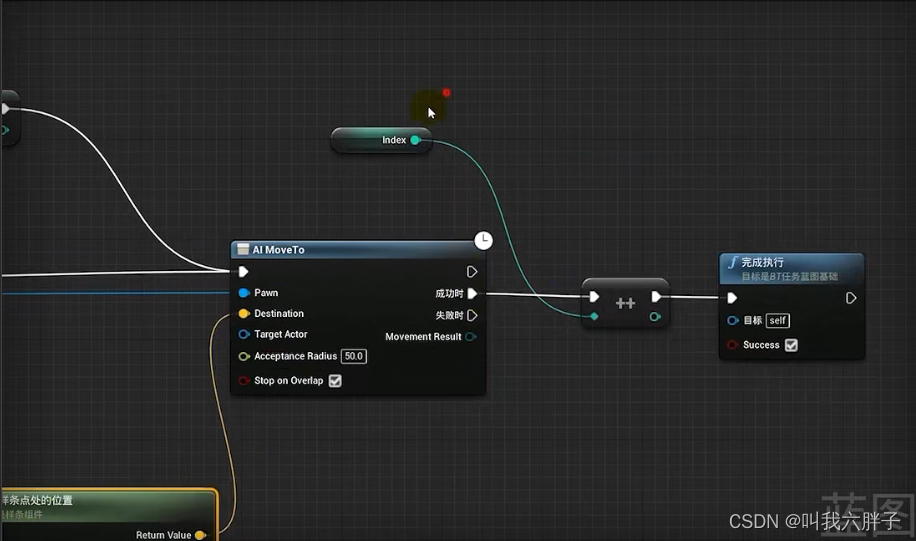
打开事件树,在左上角新建任务,新建
拉出时间接收执行AI,连接获取类的所有Actor(Actor Class选中刚才创建的蓝图)















 1212
1212











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









