






1.pangolin版本错误,导致出现找不到eigen3
解决方法是安装v5版本的pangolin或者安装pangolin的release版本,更稳定一些
2.还是有一些slot等等的东西不在命名空间内,老错误了,c++版本的问题,详见ORB-slam3编译错误
3.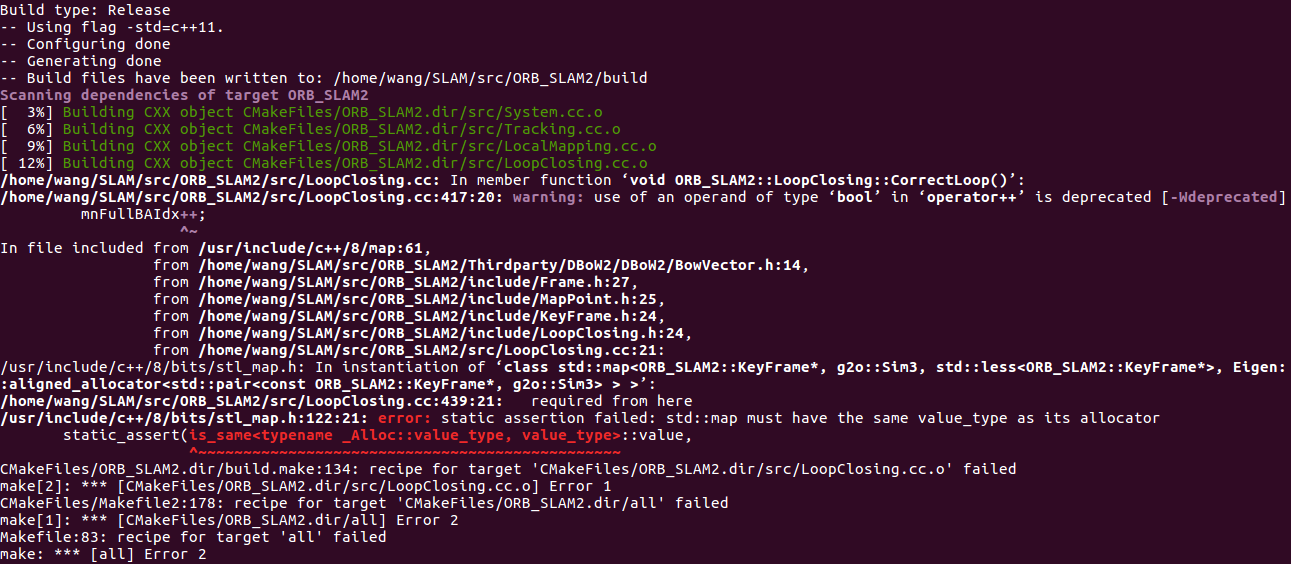
value type问题,loopclosing.h
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose;
改成
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<KeyFrame *const, g2o::Sim3> > > KeyFrameAndPose;
即可
4. 5.usleep没有定义
5.usleep没有定义
在对应文件里面加入
#include<unistd.h>
即可
6.opencv版本问题,使用opencv4会报错,安装opencv3即可
7.ORBslam2编译好之后,即可编译dxslam了
8.eigen
















 4677
4677











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









