







 本文详细介绍了PID控制的三个组成部分:比例、积分和微分,并通过洗澡调节水温的例子进行生动解释。同时,使用Matlab/Simulink进行PID控制的仿真,比较了仅比例控制、比例积分控制以及比例积分微分控制在误差消除上的效果,展示了不同控制方式对系统响应速度和稳定性的影响。
本文详细介绍了PID控制的三个组成部分:比例、积分和微分,并通过洗澡调节水温的例子进行生动解释。同时,使用Matlab/Simulink进行PID控制的仿真,比较了仅比例控制、比例积分控制以及比例积分微分控制在误差消除上的效果,展示了不同控制方式对系统响应速度和稳定性的影响。
目录
一、PID控制的含义
P——Propotional,比例控制;
I——Integral,积分控制;
D——Deravative。
可以直观的将P理解为现在的误差,I理解为过去的误差(累积),D理解为未来的误差(预测)。下面用一个形象的例子来说明。
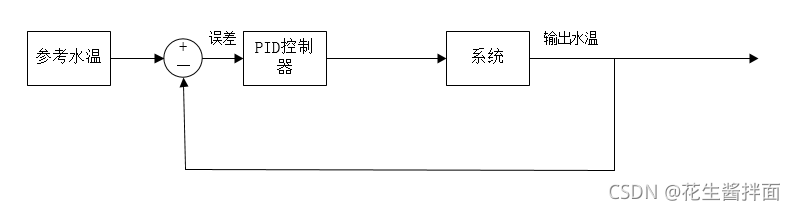
我们在洗澡的时候向浴缸里放水,我们希望把水温调节到一个合适的温度。此时的PID控制器就相当于我们在调节水温时拧动水龙头,不断地调节水龙头出水的冷热程度。
①比例控制:KpE。Kp称为比例增益,E是参考水温与输出水温间的误差。比例环节就相当于把手放到浴缸里,感受当前温度和预期温度的差,从而控制水龙头向左还是向右拧。
②积分控制:Ki∫Edt。Ki称为积分增益。积分环节相当于用手感受水温从放水以来的总体变化程度,根据过去累积的温度差控制龙头。
③微分控制:。微分环节相当于感受水温误差的变化趋势,预测将来可能会怎样变化。
从上述的描述中,我们可以发现比例控制关注的是现在的误差,即present;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 397
397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









