






(一)FMCW雷达信号
FMCW雷达基本原理(通俗易懂)-CSDN博客
FMCW雷达发射信号主要有锯齿波、三角波、正弦波三种。
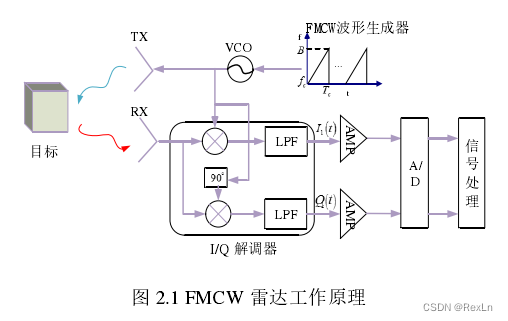
其中,VCO:压控振荡器;TX:发射基;RX:接收基;LPF:低通滤波器;A/D:模数转换模块。
图中FMCW波形生成器的信号为:
s
(
t
)
=
A
cos
(
2
π
∫
0
t
f
(
y
)
d
y
)
f
(
y
)
=
f
0
+
B
T
C
t
\begin{matrix} {s(t) = A{\mathit{\cos}\left( {2\pi{\int_{0}^{t}{f(y)dy}}} \right)}} \\ {f(y) = f_{0} + \frac{B}{T_{C}}t} \end{matrix}
s(t)=Acos(2π∫0tf(y)dy)f(y)=f0+TCBt
其中,f(y)是瞬时功率;f0是初始频率;B是雷达带宽;Tc是扫频周期。合并上述2个公式,得到线性调频波信号,假设初始相位为φ0:
s
(
t
)
=
A
cos
(
2
π
(
f
0
t
+
B
2
T
c
t
2
)
+
φ
0
)
s(t) = A{\mathit{\cos}\left( {2\pi\left( {f_{0}t + \frac{B}{2T_{c}}t^{2}} \right) + \varphi_{0}} \right)}
s(t)=Acos(2π(f0t+2TcBt2)+φ0)
可简化为:
1.1 发射信号
毫米波雷达发射一个调频连续波(FMCW)信号。这种信号的频率随时间线性增加,可以表示为:
S
(
t
)
=
A
cos
(
2
π
(
f
0
t
+
1
2
α
t
2
)
)
S(t) = A \cos(2\pi (f_0 t + \frac{1}{2} \alpha t^2))
S(t)=Acos(2π(f0t+21αt2))
其中:
- A A A是信号的振幅。
- f 0 f_0 f0是初始频率。
- a l p h a alpha alpha是频率调制斜率,即频率随时间的变化率。
- t t t 是时间。
1.2 信号反射
当雷达信号遇到目标物体时,它会被反射回雷达接收器。如果目标物体与雷达之间的距离为 R ( t ) R(t) R(t),则反射信号需要时间 τ = 2 R ( t ) c \tau = \frac{2R(t)}{c} τ=c2R(t)来回传播,其中 c c c 是光速。
1.3 接收信号
雷达接收器接收反射回来的信号:
S
r
(
t
)
=
A
cos
(
2
π
(
f
0
(
t
−
τ
)
+
1
2
α
(
t
−
τ
)
2
)
)
S_r(t) = A \cos(2\pi (f_0 (t-\tau) + \frac{1}{2} \alpha (t-\tau)^2))
Sr(t)=Acos(2π(f0(t−τ)+21α(t−τ)2))
将
τ
\tau
τ代入,得到:
S
r
(
t
)
=
A
cos
(
2
π
(
f
0
(
t
−
2
R
(
t
)
c
)
+
1
2
α
(
t
−
2
R
(
t
)
c
)
2
)
)
S_r(t) = A \cos(2\pi (f_0 (t - \frac{2R(t)}{c}) + \frac{1}{2} \alpha (t - \frac{2R(t)}{c})^2))
Sr(t)=Acos(2π(f0(t−c2R(t))+21α(t−c2R(t))2))
1.4 混频
接收到的信号与发射信号进行混频(乘以发射信号的共轭),提取出多普勒信息:
S m ( t ) = S ( t ) × S r ∗ ( t ) S_m(t) = S(t) \times S_r^*(t) Sm(t)=S(t)×Sr∗(t)
这里 S r ∗ ( t ) S_r^*(t) Sr∗(t)是 S r ( t ) S_r(t) Sr(t)的复共轭。混频后得到的信号包含距离和多普勒信息:
S m ( t ) = A 2 cos ( 2 π ( f 0 τ − 1 2 α τ 2 + α t τ ) ) S_m(t) = A^2 \cos(2\pi (f_0 \tau - \frac{1}{2} \alpha \tau^2 + \alpha t \tau)) Sm(t)=A2cos(2π(f0τ−21ατ2+αtτ))
1.5 距离和速度计算
对混频后的信号进行快速傅里叶变换(FFT),可以得到距离和多普勒频率。
- 距离测量:距离 R R R与混频信号的频率 f d f_d fd 之间的关系为:
R = c f d 2 α R = \frac{c f_d}{2 \alpha} R=2αcfd
其中 f d f_d fd 是通过FFT得到的距离维度的频率分量。
- 速度测量:目标物体的速度 v v v 与多普勒频率 f dop f_{\text{dop}} fdop 的关系为:
v = f dop λ 2 v = \frac{f_{\text{dop}} \lambda}{2} v=2fdopλ
其中 λ = c f 0 \lambda = \frac{c}{f_0} λ=f0c 是雷达发射信号的波长。
1.6 角度估计
通过多个接收天线和波束形成算法(如MUSIC或ESPRIT),可以估计目标物体的角度 θ \theta θ(方位角)。利用接收到的信号相位差,可以计算出:
θ
=
sin
−
1
(
λ
Δ
ϕ
2
π
d
)
\theta = \sin^{-1}\left(\frac{\lambda \Delta \phi}{2\pi d}\right)
θ=sin−1(2πdλΔϕ)
其中:
- Δ ϕ \Delta \phi Δϕ 是相邻天线接收信号的相位差。
- d d d 是相邻天线之间的距离。
1.7 生成点云
毫米波雷达通过发送和接收电磁波来检测目标物体的距离、速度和角度,从而生成点云数据。点云是指在三维空间中表示目标物体表面点的集合,这些点包含了距离、角度和多普勒速度等信息。以下是使用毫米波雷达生成点云数据的基本步骤和公式推导过程。
最终,结合距离
R
R
R,速度
v
v
v ,和角度
θ
\theta
θ ,可以构建三维空间中的点云:
p
r
=
{
(
R
i
,
v
i
,
θ
i
)
∣
i
=
1
,
2
,
…
,
N
}
p_{r} = \{ (R_i, v_i, \theta_i) | i = 1, 2, \dots, N \}
pr={(Ri,vi,θi)∣i=1,2,…,N}
其中
N
N
N 是检测到的目标物体数量。
这个过程允许毫米波雷达在不同的应用场景下提供详细的空间和运动信息,支撑自动驾驶、监测、和其他智能系统的需求。
















 1912
1912











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









