






从前面的博文中,已经了解了毫米波雷达距离、速度、角度的探测原理,而这三种结合到一起,就是当前应用较为火热的3D点云信息,将毫米波雷达获取的目标信息表示为一系列的距离-速度-角度三元组,每个三元组代表一个目标点。这些目标点可以用来构建目标的三维点云模型。
当然现在已经发展出了4D点云,就是在距离、速度、方位角的基础上加了一个俯仰角的信息,这个后续会出一篇博文再详细讨论。
使用毫米波雷达生成点云数据的基本步骤和公式,结合距离,速度
,和角度
,可以构建三维空间中的点云:
其中,N是检测到的目标数量
毫米波雷达点云生成的原理,可以简单总结为以下几个步骤:
步骤①——发射调频信号:
FMCW雷达发射一系列调频信号,这些信号再接触到环境物体后,会被物体反射回雷达。
步骤②——接收反射信号:
FMCW雷达会通过接收天线接收到反射回来的信号,并测量信号的时间延迟、频率和幅度等参数。
步骤③——生成点云数据:
通过处理接收到的信号,雷达可以计算出物体的距离、速度、角度等信息,然后将这些信息转换成点云数据,并将其存储在内存中或者输出到外部设备上。
步骤④——进行数据处理和分析:
得到点云数据之后,可以进行数据处理和分析,例如对点云进行滤波、分割、聚类等操作,从而提取出更加有用的信息。
对于步骤①②,主要由雷达信号采集系统完成,也是雷达系统的重要组成部分,其主要任务是将雷达天线接收到的电磁波信号转换成可供雷达信号处理系统处理的数字信号。雷达信号采集系统一般由天线、接收机、模数转换器和数据存储器等组成。
天线:负责接收雷达目标反射的电磁波信号,并将其转换成电信号。
接收机:负责放大和滤波天线接收到的电信号,并将其转换成中间频率信号。
模数转换器:负责将中间频率信号转换成数字信号。
数据存储器:负责将数字信号存储起来,以便雷达信号处理系统进行处理。
对于步骤③④,一般都是在雷达信号数据处理系统中完成,处理系统一般由信号预处理、目标检测、目标跟踪和数据融合等组成。
信号预处理:主要包括滤波、去噪和数据压缩等。滤波可以去除雷达信号中的噪声和干扰,提高信噪比。去噪可以去除雷达信号中的噪声,提高雷达目标的检测性能。数据压缩可以减少雷达信号的数据量,提高雷达信号处理系统的处理效率。
目标检测:主要包括恒虚警检测、自适应门限检测和相关检测等。恒虚警检测是一种最简单的目标检测方法,其基本原理是将雷达信号的幅度与一个预设的阈值进行比较,如果雷达信号的幅度大于阈值,则认为存在雷达目标。自适应门限检测是一种改进的恒虚警检测方法,其基本原理是根据雷达信号的噪声水平动态调整阈值,以提高雷达目标的检测性能。相关检测是一种基于相关性的目标检测方法,其基本原理是将雷达信号与一个预先知道的模板进行相关运算,如果相关值大于一个预设的阈值,则认为存在雷达目标。
目标跟踪:主要包括卡尔曼滤波、粒子滤波和无迹卡尔曼滤波等。卡尔曼滤波是一种最常用的目标跟踪方法,其基本原理是利用雷达信号对雷达目标的状态进行估计,并根据估计值预测雷达目标的未来状态。粒子滤波是一种改进的卡尔曼滤波方法,其基本原理是利用一组粒子来表示雷达目标的状态,并根据雷达信号对粒子进行更新。无迹卡尔曼滤波是一种改进的卡尔曼滤波方法,其基本原理是利用雷达信号对雷达目标的状态进行估计,并利用估计值预测雷达目标的未来状态,而不需要对雷达目标的状态进行显式的估计。
数据融合:是将来自不同传感器或同一传感器不同模式的数据结合起来,以提高目标检测、分类和跟踪的性能。常见的数据融合方式有:特征级融合,在特征提取阶段,将不同传感器或不同模式的数据转换为特征向量,然后进行组合。例如,可以从FMCW雷达的距离-多普勒图中提取特征,并与其他传感器数据的特征向量结合。决策级融合,每个传感器或模式独立完成目标检测和分类,然后将结果(如概率或置信度)组合起来形成最终决策。这可以通过投票机制、贝叶斯方法或决策树来实现。多传感器融合,结合FMCW雷达与其他类型的传感器,如摄像头、激光雷达(LiDAR)或红外传感器,以利用各自的优势并提高整体系统的鲁棒性和准确性。
生成点云数据,又可以分为以下几个步骤 :
步骤①——数据预处理:
首先需要对毫米波雷达接收的回波数据进行预处理,例如噪声滤波、距离校正等,以提高数据质量。
步骤②——点云转换:
将回波数据预处理后得到的距离-速度-角度三元组,转换为三维坐标系下的点云数据。
步骤③——点云滤波:
对生成的点云进行滤波处理,例如去除噪声点、离群点等,以获得更准确的点云模型。
步骤④——点云可视化:
利用Matlab提供的绘图工具,将生成的点云可视化,便于观察和分析。
一些雷达相关公式记录:
1、功率密度
假设发射机产生功率为瓦,并各向同性辐射(全方向,增益为1),在距离发射机距离为R处的功率密度为:
功率密度= (不考虑传播介质的损耗)(全方向辐射,可看作圆,圆表面每点处的功率总和即为发射功率——能量守恒)
若将全方向的天线更改为定向天线,最大增益为,如图所示
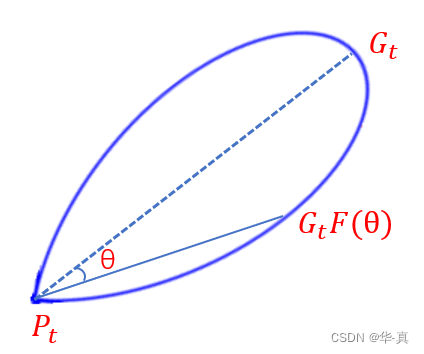
此时,功率密度变为:
功率密度=
若在R处有一平面与雷达视线正交平面面加为,则该平面所截取到的功率为:

















 688
688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









