







文章目录
相机模型
相机模型主要有两类,一类是pinhole针孔相机模型,一类是Omnidirectional全向相机。
针孔相机模型(透视变换)
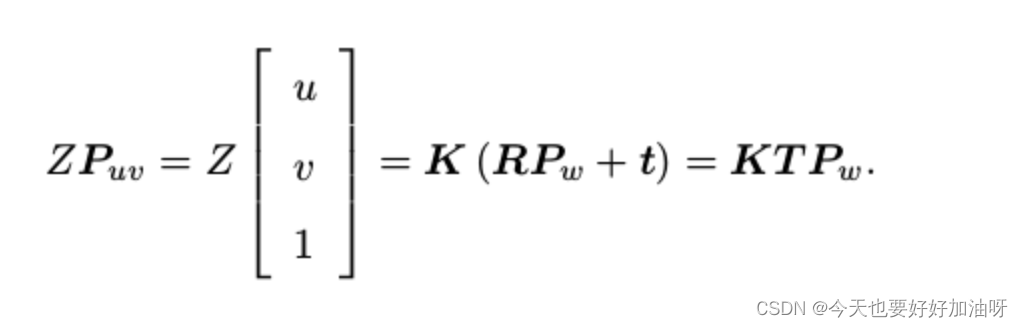
内外参
内参:从相机坐标系到图像坐标系到像素坐标系

外参:从世界坐标系到相机坐标系
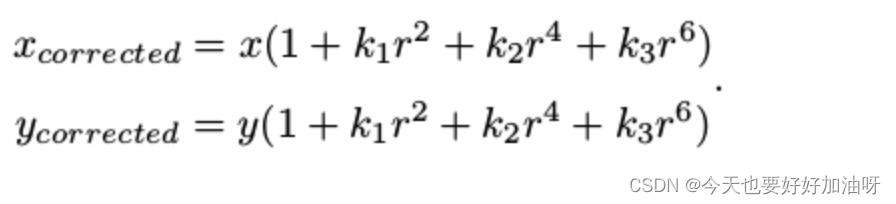
畸变
径向畸变:桶形畸变、枕型畸变
切向畸变

针孔相机常用标定方法:张正友标定法
弊端
光线始终沿直线传播使得镜头难以捕捉位于边缘的物体
全向相机模型
鱼眼相机模型
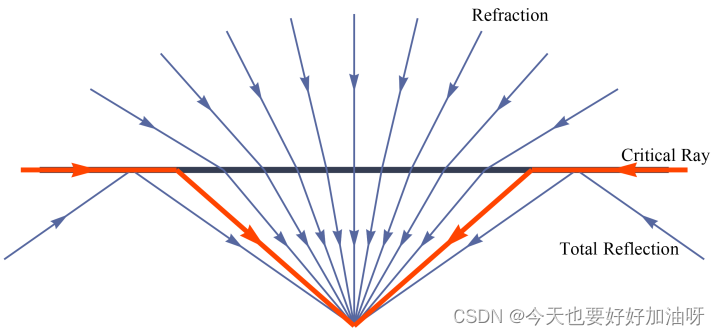
成像原理
从这篇学的
在成像的过程中,入射光线经过不同程度的折射,投影到尺寸有限的成像平面上,使得鱼眼镜头与普通镜头相比起来拥有了更大的视野范围。
鱼眼相机的模型
最完整版
成像模型实际上是为了用来描述入射角与成像像高之间的映射关系,大致分为等距投影模型、等立体角投影模型、正交投影模型和体视投影模型四种。
等距投影是以线性关系来定义,等立体角投影模型是用正弦函数来定义
等距投影
物体的空间角距离与物体的像在像平面上的平面距离,是成正比的。
公式: r = f θ r=fθ r=fθ
物体在成像平面上离开画面中心的距离,与物体在空间中离开光轴的角度成正比,这个比例系数就是镜头焦距。
等积投影 / 等立体角投影
能保持变换前后,物体所占的立体角大小不变。
公式:
r
=
2
f
s
i
n
(
θ
/
2
)
r=2fsin(θ/2)
r=2fsin(θ/2)
在半球空间中,半球面上两个面积相同的图案,成像后,在成像平面上的两个图案的面积仍然相同(虽然两者形状不一定相似)。
正交投影
保持角度不变,数学上叫做保角变换
公式:
r
=
2
f
t
a
n
(
θ
/
2
)
r=2ftan(θ/2)
r=2ftan(θ/2)
保持角度不变,意思是任何直线相交的角度,在变换之后是保持不变的(虽然直线本身可能变弯曲)。
体视投影
把整个半球直接拍扁
公式:
r
=
f
s
i
n
(
θ
)
r=fsin(θ)
r=fsin(θ)
在几种投影方式中,这种投影方式带来的扭曲最大,对边缘物体压缩最厉害,实际很少使用。
很显然,这种投影方式的最大视场角也不能大于 180°
鱼眼相机的一般多项式近似模型(OpenCV)
r = tanθ 泰勒展开
(还可以看看,再看看对极几何)

通过无畸变图像中的点能够计算出鱼眼图像中的畸变点。
OpenCV中对鱼眼相机的标定步骤:
(1)初始化内参数;
(2)初始化外参数;
(3)使用LM算法最小化定位的图像点和投影的图像点之间的投影误差;
(4)确定结果。
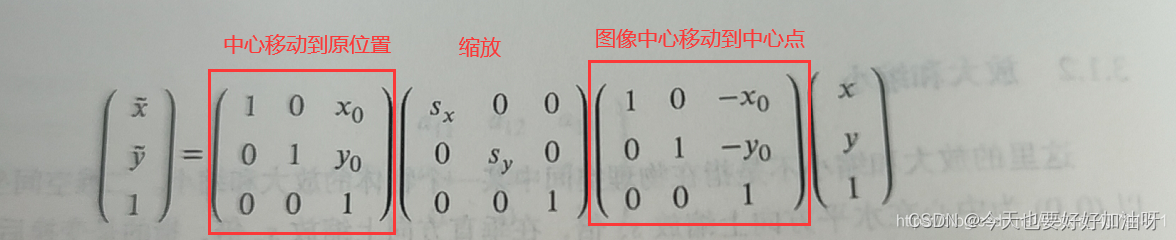
仿射变换
平移,放大 / 缩小,旋转
透视变换(投影变换)
透视变换: 透视变换将图像投影到一个新的视平面,是二维到三维再到另一个二维(x’, y’)空间的映射。
图像处理
边缘检测
这个晚些回来总结
图像匹配
几何约束啥的,BA光束法平差
四元数
四元数插值
四元数加权平均
提示:这里可以添加总结














 7657
7657











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









