






前言:因为一些原因做手眼标定时候误差总是很大,前前后后花费了一个月,这里特别感谢一位网友,迪卡魏曼依奇君对我的帮助,这里也希望能帮助其他人。
1.要清楚六轴机器人的单位是mm,而halcon默认是m。
2.要注意机器人的姿态创建,create_pose(0.419503, -0.075009, -0.190483, 179.809, -0.013, -0.618, 'Rp+T', 'abg', 'point', Pose13),要清除自己是‘abg’还是‘gba’,abg是绕zyx轴旋转而gba轴是绕xyz旋转。
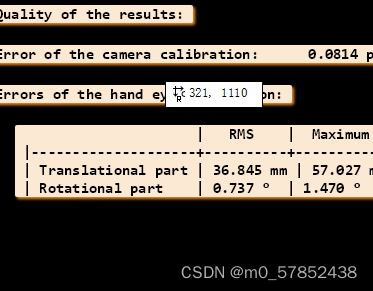
3.这便是我痛苦一个月的问题,像素质量很高,并且也图片数量也够但就是误差很大,并且期间也换了机器人,也尝试了很多办法,但不论如何平移量误差都很大,最后发现是相机设置为了镜像,把镜像不要勾选就好了。
总结:花费了大量时间精力和财力,也咨询了很多人,在这一刻也体会到以前那些写博客的人的精神内核。















 2580
2580











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









