







博主是菜鸡,参考就好,不要盲从。(菜鸟境内,大佬绕行ヽ(´•ω•`)、)
这里先说一下,虽然前面我说的是在虚拟机上Ubuntu20.04进行每一步的安装,但是我因为项目的原因是在Jetson nano 4G的板子上使用的Ubuntu18.04,所以有的地方可能会出一点bug,出bug了你再联系我。
目录
添加安装源
Ubuntu20的源和密钥如下(我这里只给清华源啊,官方源太慢)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Ubuntu18的源和密钥如下
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
设置好源之后,更新一下软件包
sudo apt-get update安装ROS
然后安装对应版本的ROS

sudo apt-get install ros-melodic-desktop-full不同版本更改中间第二个单词就行,比如20改成ros-noetic-desktop-full
我这里只给了安装全部的命令啊,如果你因为特殊需求,需要安装部分的话就自己去网上查吧。
这里插一个bug报错
有的同学使用upgrade之后,安装软件会出现如下报错

大概是因为upgrade的时候把版本信息弄错了
这里只需要
cd /var/lib/dpkg
sudo mv info info.bak
sudo mkdir info然后更新一下软件包sudo apt-get install或者sudo apt-get upgrade都行
安装构建依赖
安装一下需要的依赖项
sudo apt install python3-rosdep
然后去初始化
sudo rosdep init
rosdep update
如果成功的话,他们分别的输出应该如图所示

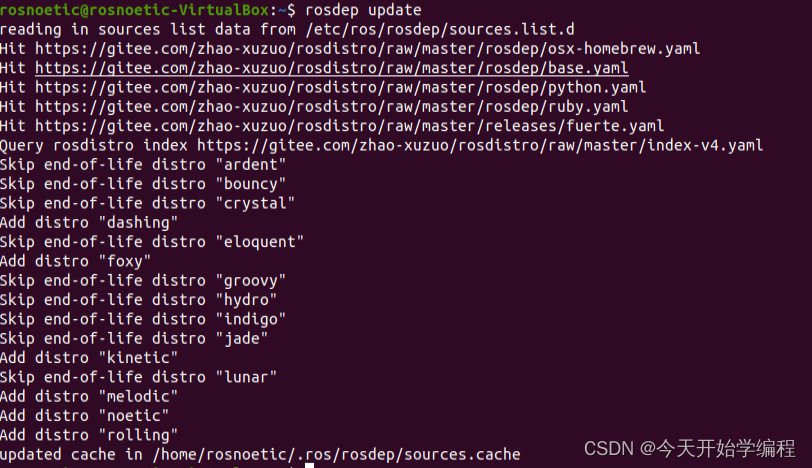
嗯,很好,不出意外的话,该出意外了。
这个地方初始化大概率出问题啊,如果你没出问题那自然是可喜可贺

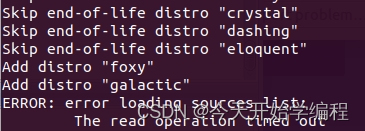
大概会有如图两种bug,原因是因为国外源被屏蔽。
你可以选择去码云上寻找新的资源,但是感觉就很麻烦,所以这里我提供一个更加方便的初始化方式。
那就是鱼香ROS的rosdepc ,当初我初始化弄了好几天都没弄好,最后在鱼香大大的帮助下终于成功。
sudo pip3 install rosdepc --upgrade
sudo rosdepc init
rosdepc update然后就完美解决ROS初始化的问题了,鱼香大大yydsヾ(◍°∇°◍)ノ゙
配置环境与测试
配置一下环境
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
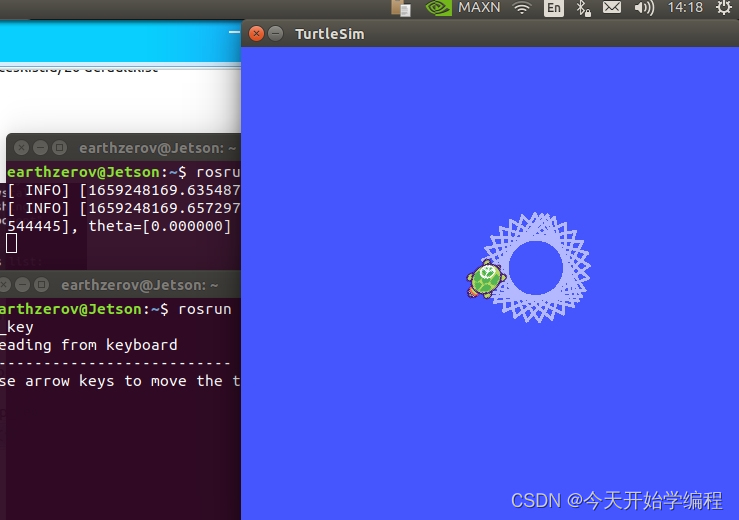
source ~/.bashrc然后就可以测试一下ROS是否安装完成了,ros自带一个小海龟的例子,我们运行一下
总共开启三个终端
第一个终端
roscore第二个终端
rosrun turtlesim turtlesim_node第三个终端
rosrun turtlesim turtle_teleop_key
然后你就可以通过方向键来控制小海龟“拉粑粑”了(≧ω≦)/
ROS到此就基本安装完成了















 1884
1884











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









