






目录
attention:ubuntu系统的版本:20.04
安装的ros版本:ros-noetic
1.软件与更新上打开
显示程序->软件与更新->前面四个显示已经勾选上再关闭(一般默认是勾选上的)

2.设置安装源
(官方安装源个人不推荐)
中山大学(Sun Yat-Sen University)镜像源:
$ sudo sh -c '. /etc/lsb-release && echo "deb http://mirror.sysu.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
中国科学技术大学镜像源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
清华镜像源(个人强推)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
3.设置key
sudoapt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80'--recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
4.安装
1)
sudoapt update
apt用于从互联网仓库搜索、安装、升级、卸载软件或者操作系统的工具
2)
sudoapt installros-noetic-desktop-full(官方推荐版本)
5.配置环境变量
方便在任意终端使用
Ubuntu默认使用的终端是bash
echo"source /opt/ros/noetic/setup.bash"~/.bashrc
source~/.bashrc
如果你使用的终端是zsh,则需要将以上命令中的bash都修改为zsh:
$ echo "source /opt/ros/kinetic/setup.zsh" >> ~/.zshrc
$ source ~/.zshrc
PS:
.bashrc是一个终端配准文件,通过这个配准文件,可以将之后在终端输入的ROS命令找到它的位置
source是ubuntu中用来运行脚本的命令
6.安装构建依赖
首先安装构建依赖的相关工具
sudo apt-get install python3-rosdep python3-rosinstall-generator python3-vcstools python3-vcstool build-essential初始化rosdep
sudo rosdep init出现问题如下:说明境外资源被屏蔽了

解决方法(参考B站上赵虚左老师)
第一步:打开dist-packages的文件
第二步:查找find . -type f | xargs grep "raw.githubusercontent" 所在的所有的文件
1)cd /usr/lib/python3/dist-packages/
2)find . -type f | xargs grep "raw.githubusercontent"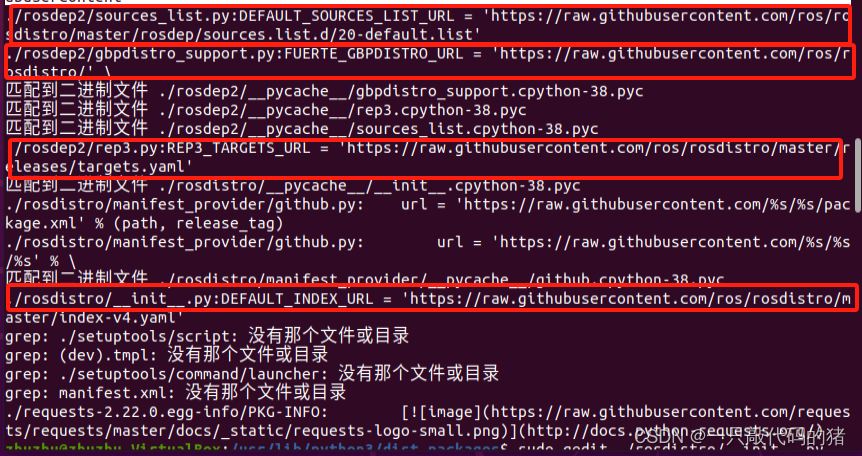
第三步:找到这四个文件,依次打开文件进行修改
打开文件的代码
sudo gedit ./rosdep2/gbpdistro_support.py
sudo gedit ./rosdep2/sourse_list.py
sudo gedit ./rosdep2/rep3.py
sudo gedit ./rosdistro/__init__.py打开其中一个文件出现(以sudo gedit ./rosdistro/__init__.py为例子):

文件依次打开之后将其修改到master之前
例如:
https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
替换为
https://gitee.com/zhao-xuzuo/rosdistro/raw/master
四个文件都修改完毕后再运行代码:
sudo rosdep init
rosdep update
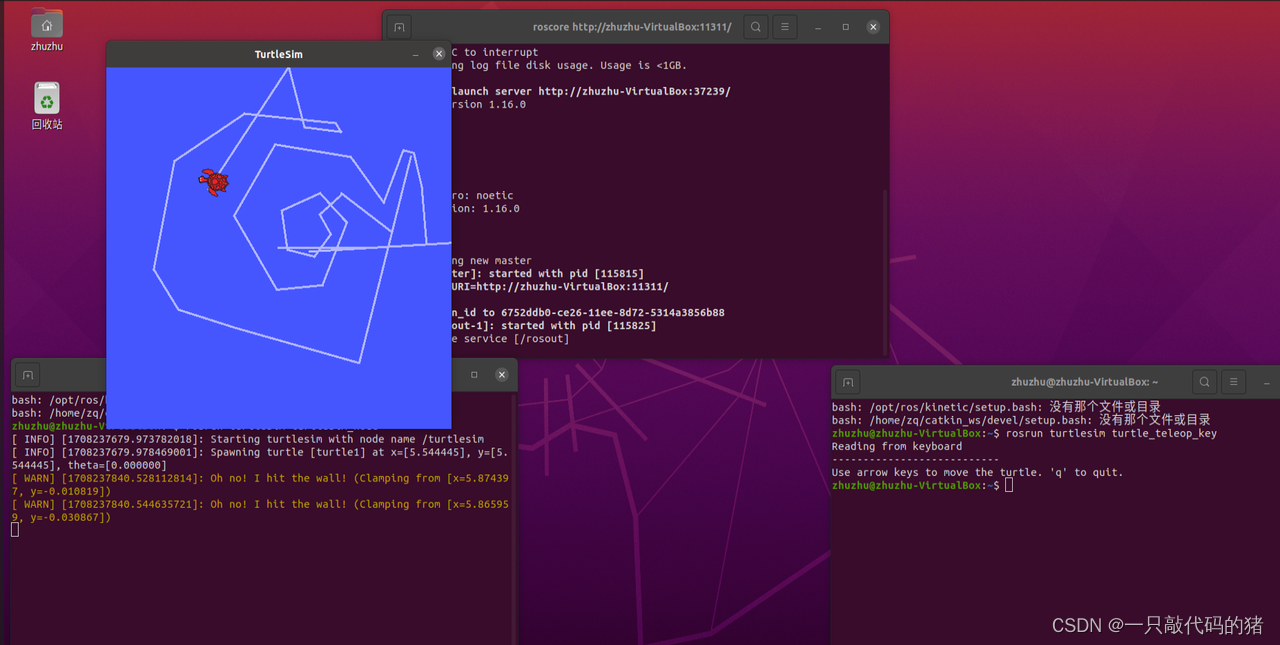
7.测试ros安装成功
步骤一:打开三个终端窗口(crl+alt+T按三次)
步骤二:窗口一输入:roscore
步骤三:窗口二输入:rosrun turtlesim turtlesim_node
步骤四:窗口三中输入:rosrun turtlesim turtle_teleop_key
光标放在第三个窗口,左右上下键控制乌龟的爬行
PS:
我在测试ros中遇到的问题:输入roscore显示需要安装roslaunch,安装完后又找不到命令
原因:环境配置有问题
解决:再输入source /opt/ros/noetic/setup.bash














 3024
3024











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









