







一.CAN基础知识介绍
<一>.CAN介绍
1.什么是CAN
CAN(Controller Area Network),是ISO国际标准化的串行通信协议。
为了满足汽车产业的“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需求。
- 低速CAN(ISO11519)通信速率10~125Kbps,总线长度可达1000米;
- 高速(经典)CAN(ISO11898)通信速率125Kbps~1Mbps,总线长度≤40米;
- CAN FD通信速率可达5Mbps,并且兼并经典CAN,遵循ISO 11898-1做数据收发。
CAN总线拓扑图
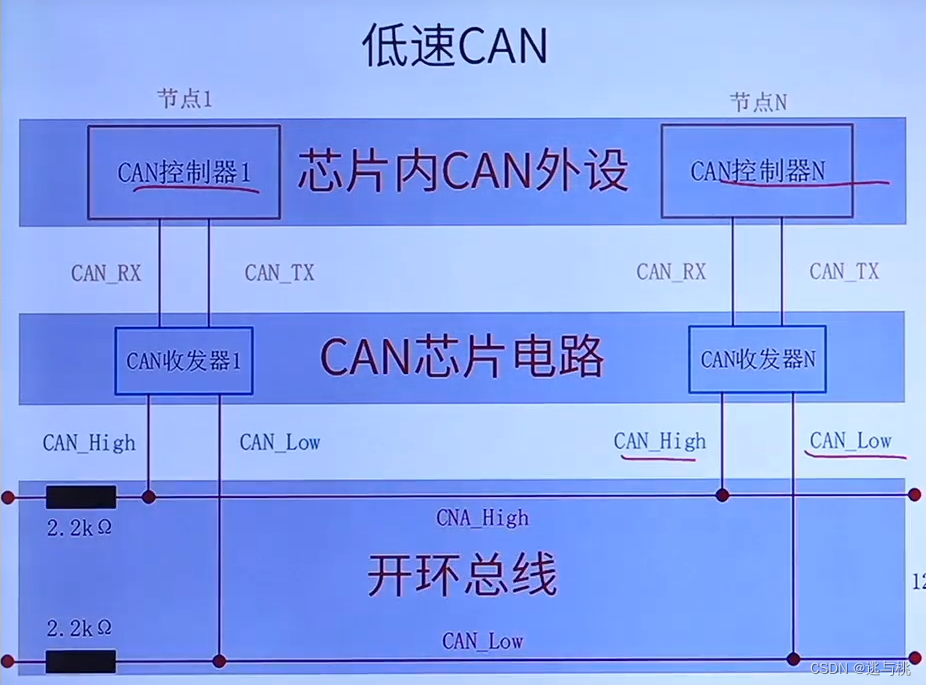
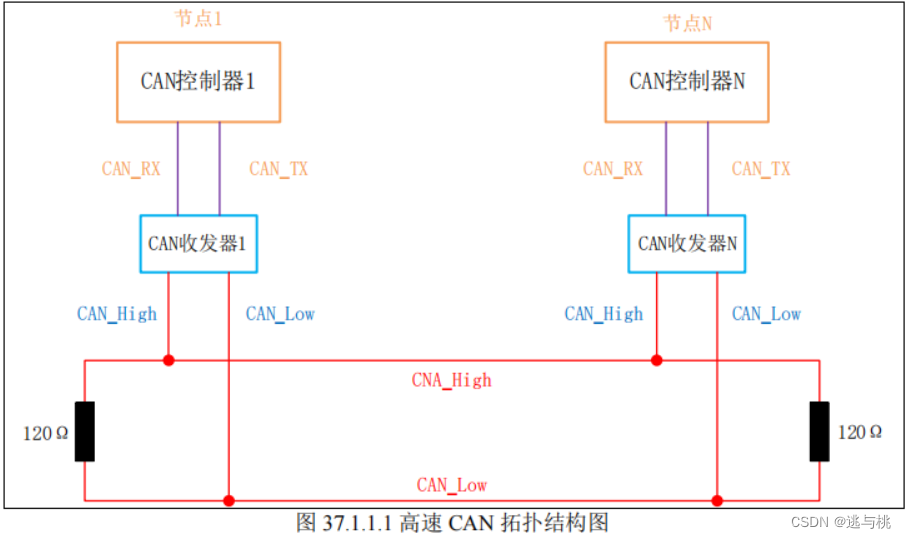
高速CAN是一个闭环总线。
终端电阻,用于阻抗匹配,以减少回波反射,CAN总线由两根线(CANL和CANH)组成,允许挂载多个设备节点(低速CAN:20和高速CAN:30)。
2.CAN总线特点
- 多主控制:每个设备都可以主动发送数据;
- 系统的柔软性:没有类似地址的信息,添加设备不改变原来总线的状态;
- 通信速度:速度快,距离远;
- 错误检测&错误通知&错误恢复功能;
- 故障封闭:判断故障类型,并且进行隔离;
- 连接节点多:速度与数量找个平衡。
3.CAN应用场景
CAN总线协议已广泛应用在汽车电子、工业自动化、船舶、医疗设备、工业设备等方面。
<二>.CAN物理层
1.CAN物理层特性
- CAN使用差分信号进行数据传输,根据CAN_H和CAN_L上的电位差来判断总线电平;
- 总线电平分为显性电平(逻辑0)和隐性电平(逻辑1),二者必居其一;
- 显性电平具有优先权;
- 发送方通过使总线电平发生变化,将消息发送给接收方。
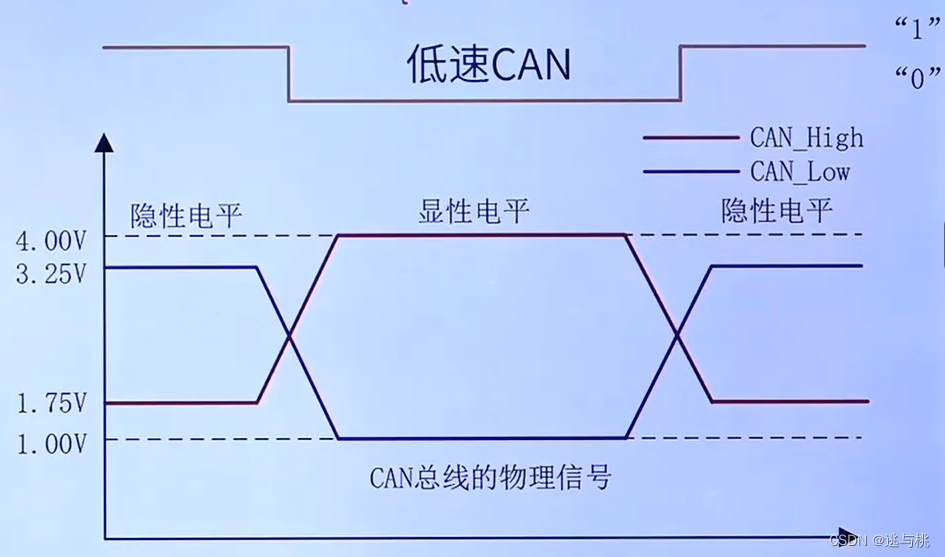
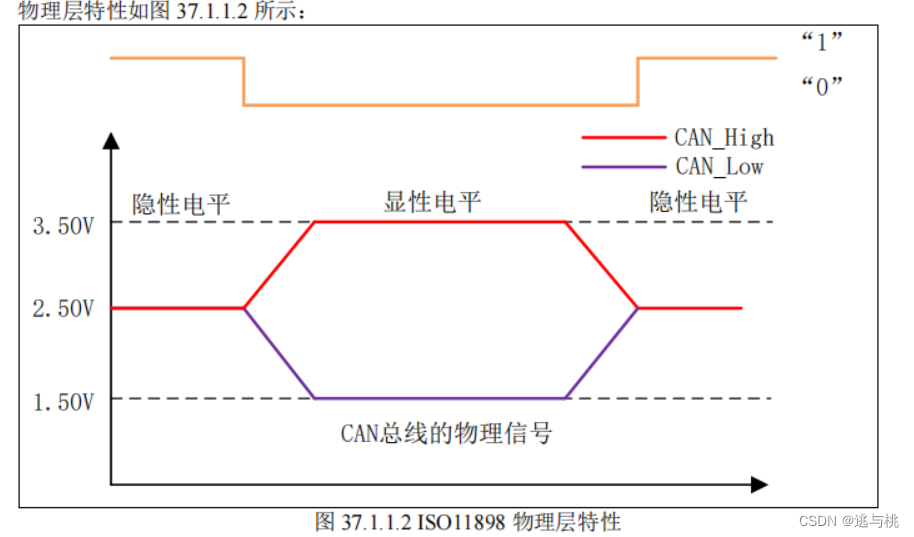
| 电平 | 高速CAN | 低速CAN |
| 显性电平(0) | U(CAN_H) - U(CAN_L) = 2V | U(CAN_H) - U(CAN_L) = 3V |
| 隐性电平(1) | U(CAN_H) - U(CAN_L) = 0V | U(CAN_H) - U(CAN_L) = -1,.5V |
2.CAN收发器芯片介绍
CAN收发器芯片:TJA1050、TJA1042、SIT1050T(支持高速CAN,传输速率可达1Mbps)。
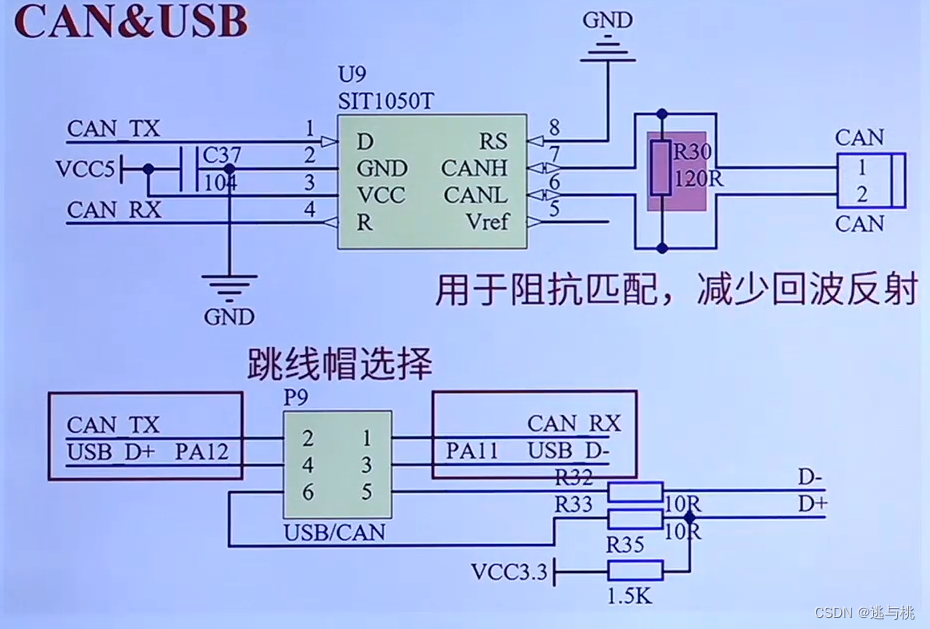
D:CAN发送引脚; R:CAN接收引脚;
CANL:低电平CAN电压输入输出端; CANH:高电位CAN电压输入输出端;
Vref:参考电压输出; RS:高速/静音模式选择(低电平为高速)。
<三>.CAN协议层
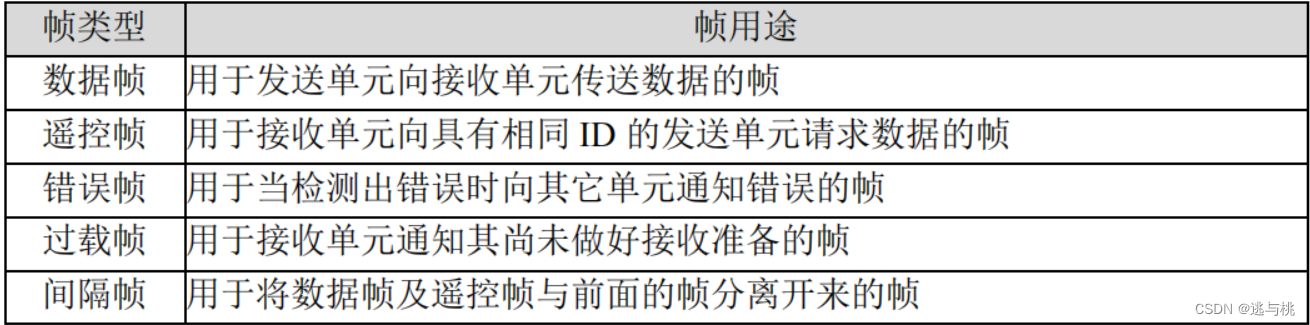
1.CAN帧种类介绍
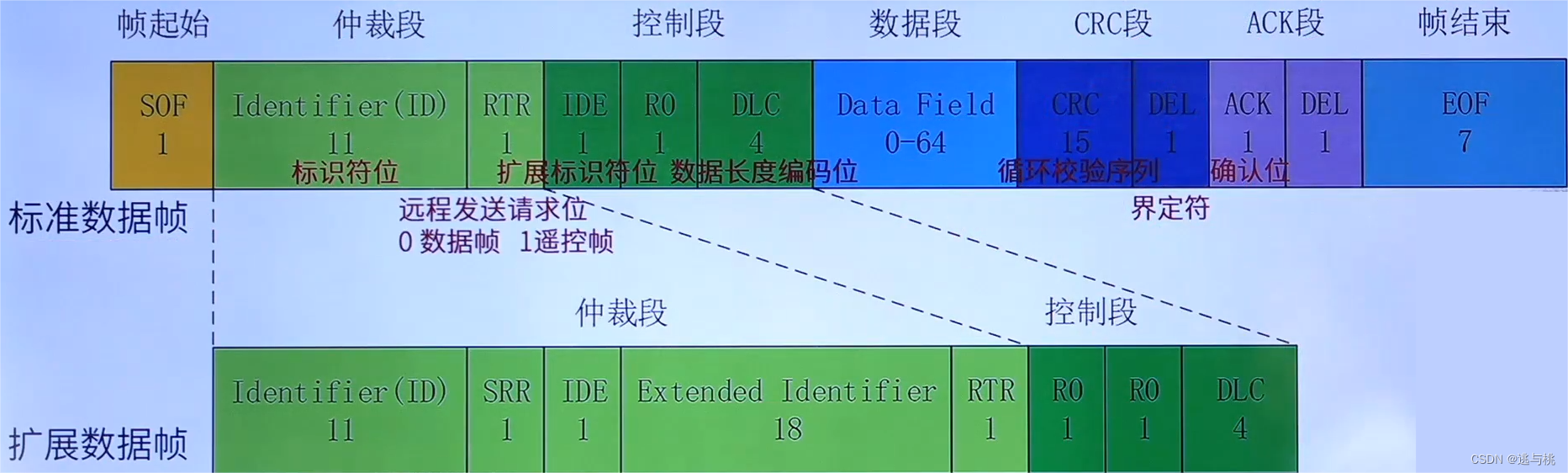
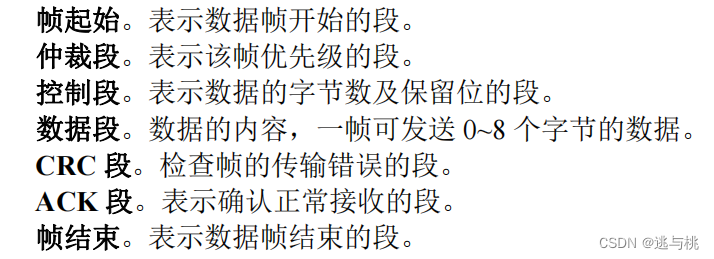
2.CAN数据帧介绍(最常用)
3.CAN位时序介绍
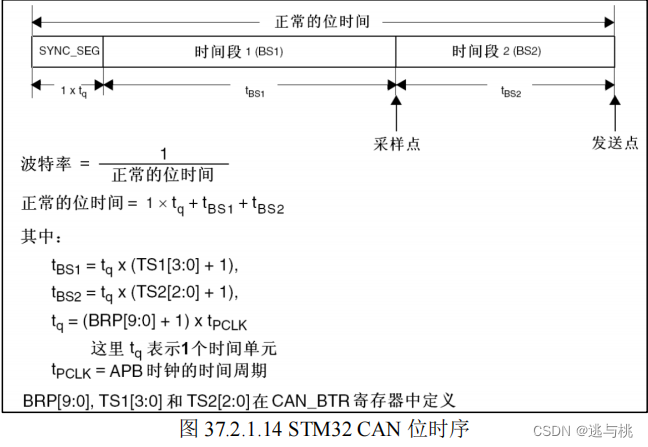
CAN总线以“位同步”机制,实现对电平的正确采样。位数据都由四段组成:同步段(SS)、传播时间段(PTS)、相位缓冲段1(PSB1)和相位缓冲段2(PSB2),每段又由多个位时序Tq组成。
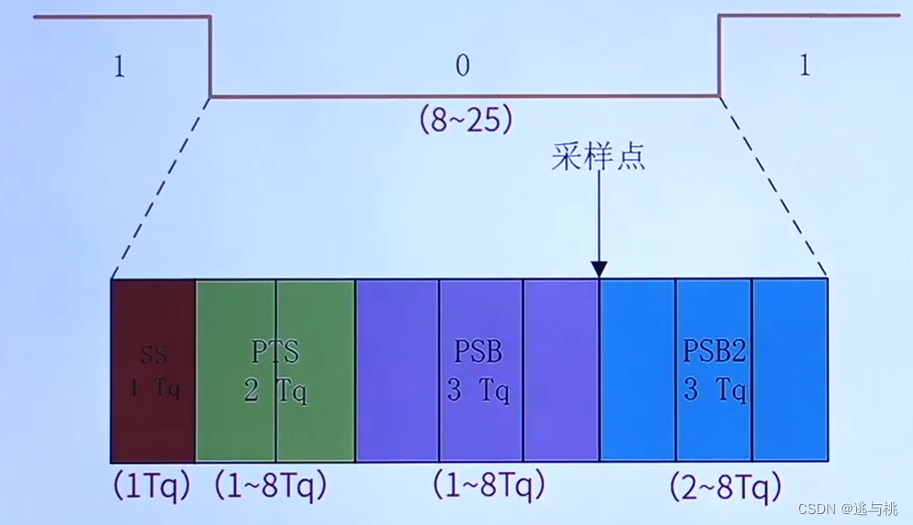
采样点是指读取总线电平,并将读到的电平作为位值的点,根据位时序,就可以计算CAN通信的波特率。
注意:节点监测到总线上信号的跳变在SS段范围内(采样点的前提),表示节点与总线的时序是同步,此时采样点的电平即该位的电平。
<1>.数据同步过程
CAN为了实现对总线电平信号的正确采样,数据同步分为硬件同步和再同步。
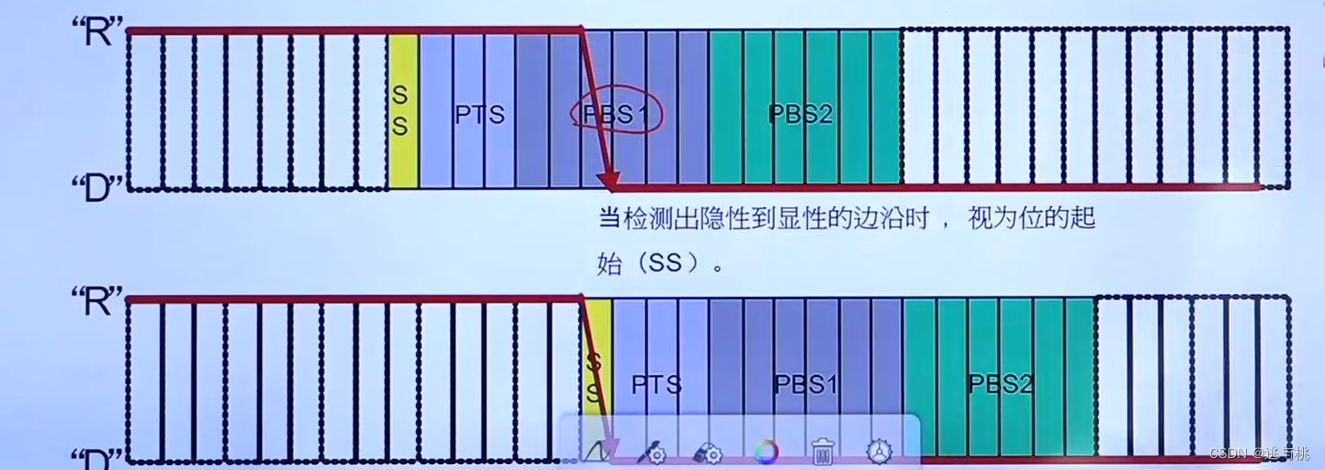
硬件同步
节点通过CAN总线发送数据,一开始发送帧起始信号。总线上其他节点会检测帧起始信号在不在位数据的SS段内,判断内部时序与总线是否同步。
假如不在SS段内,这种情况下,采样点获得的电平状态是不正确的。所以,节点会使用硬件同步方式调整,把自己的SS段平移到检测到边沿的地方,获得同步,同步情况下,采样点获得的电平状态才是正确的。
再同步
再同步利用普通数据位的边沿信号(帧起始信号是特殊的边沿信号)进行同步。
再同步的方式分为两种情况:超前和滞后,即边沿信号与SS段的相对位置。
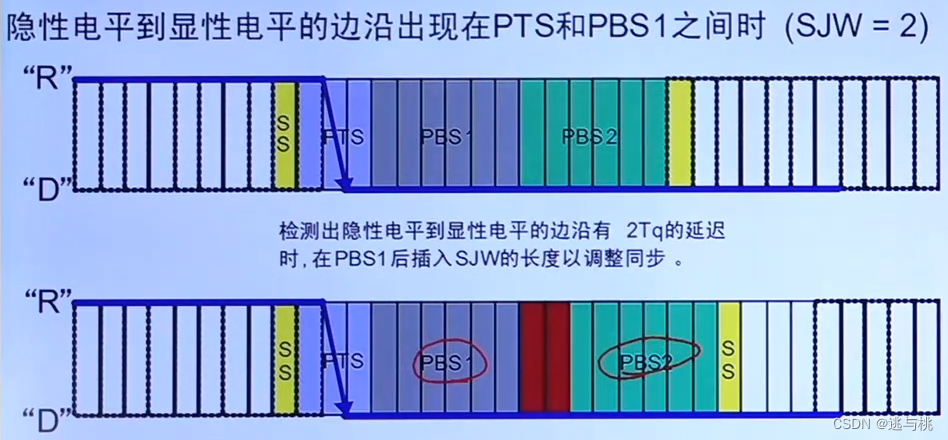
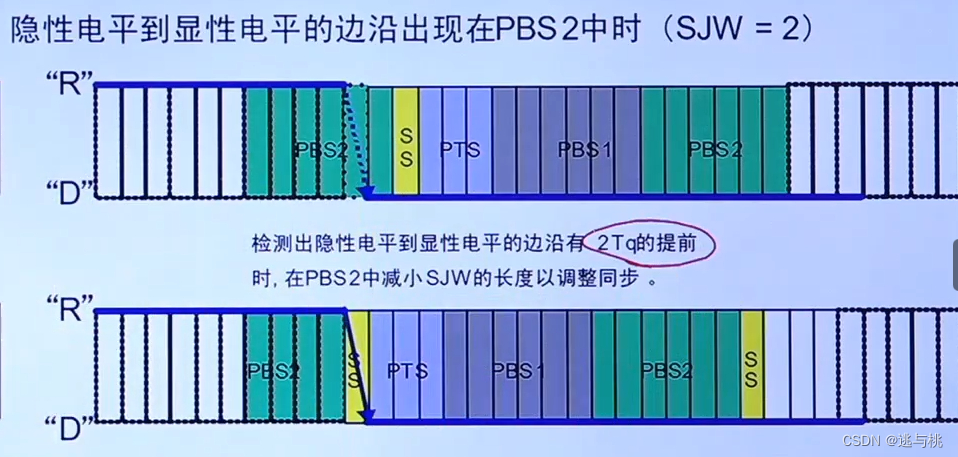
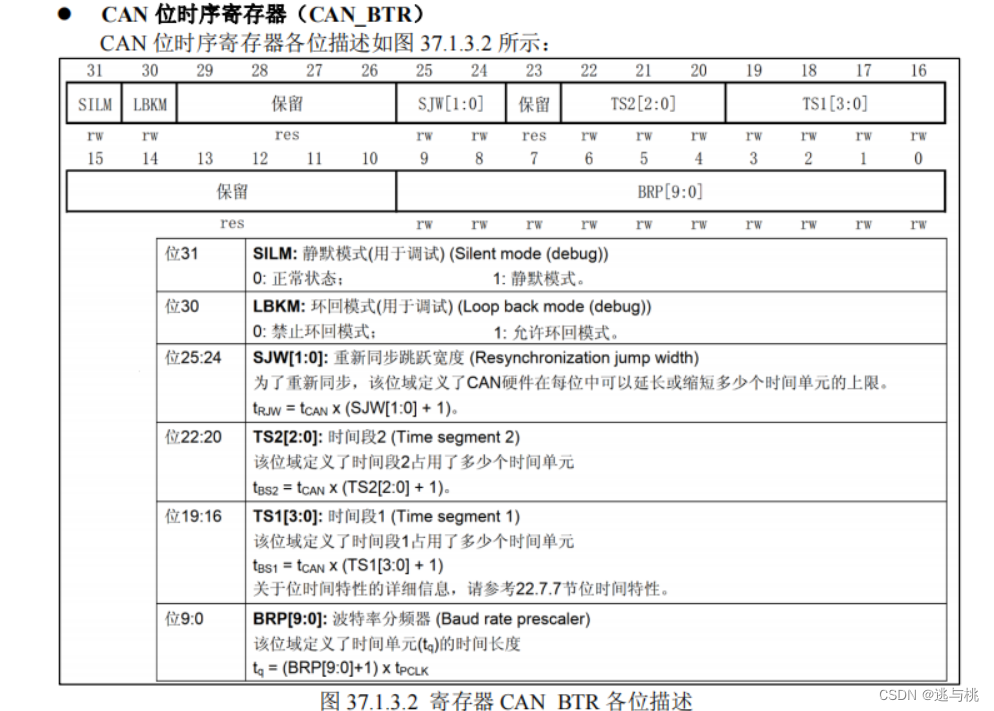
再同步时,PSB1和PSB2中增加或者减少的时间被称为“再同步补偿宽度(SJW)”,其范围:1~4Tq。
限制了SJW值后,再同步时,不能增加限定长度的SJW值。 SJW值较大时,吸收误差能力更强,但是通讯速度会下降。
4.CAN总线仲裁(优先级决定)
CAN总线处于空闲状态,最先开始发送消息的单元获得发送权。
多个单元同时开始发送时,从仲裁段(报文ID)的第一位开始进行仲裁。连续输出显性电平最多的单元可继续发送,即首先出现隐性电平的单元失去对总线的占有权变为接收。
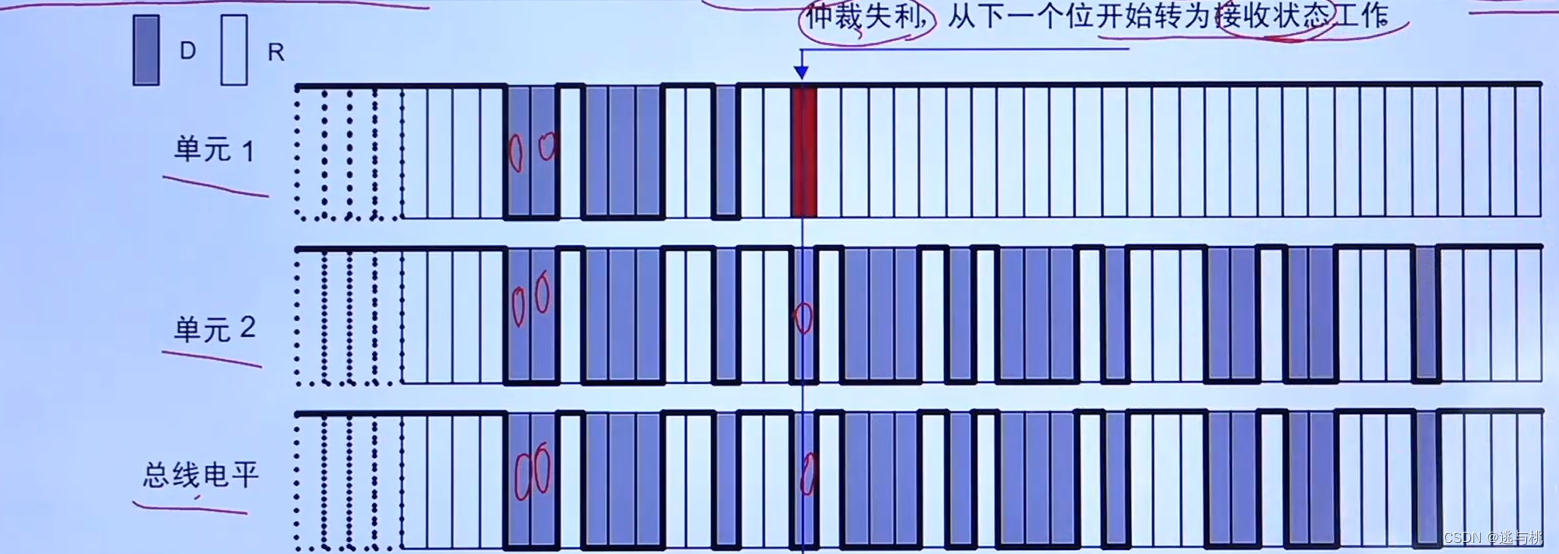
竞争失败单元,会自动检测总线空闲,在第一时间再次尝试发送。
二.STM32 CAN控制器介绍
<一>CAN控制器介绍
STM32 CAN控制器(bxCAN),支持CAN 2.0A和CAN 2.0B Active版本协议。
CAN 2.0A 只能处理标准数据帧且扩展帧的内容会识别错误,而CAN 2.0B Active 可以处理标准数据帧和扩展数据帧。CAN 2.0B Passive只能处理标准数据帧且扩展帧的内容会忽略。
BxCAN主要特点:
- 波特率最高可达1M bps;
- 支持时间触发通信(CAN的硬件内部定时器可以在TX/RX的帧起始位的采样点位置生成时间戳);
- 具有3级发送邮箱;
- 具有3级深度的2个接收FIFO;
- 可变的过滤器组(最多28个)。
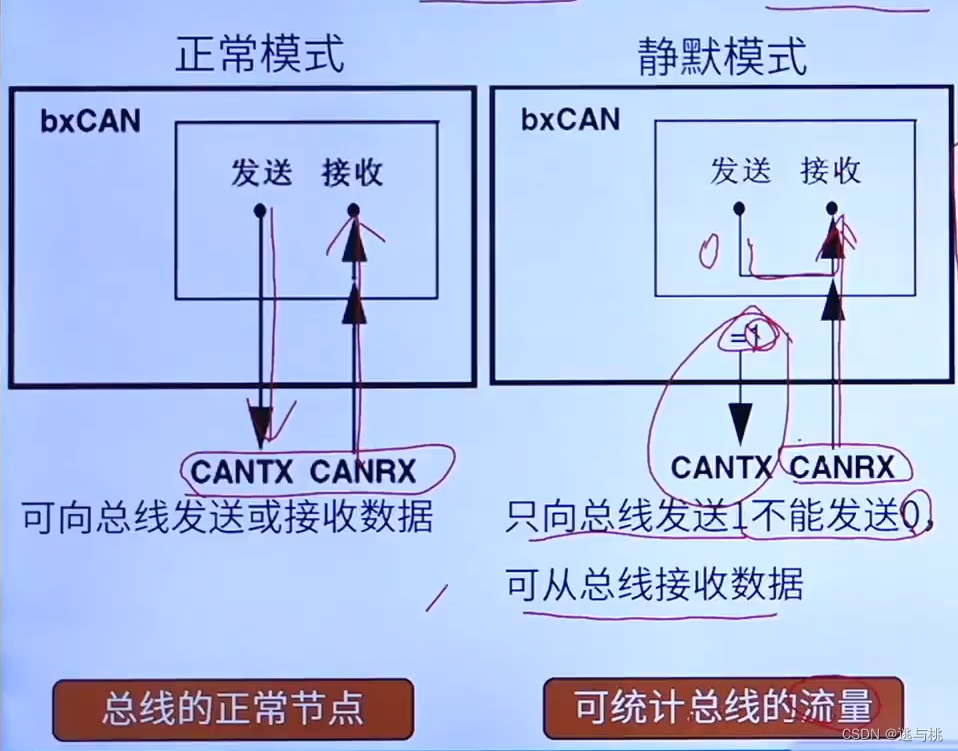
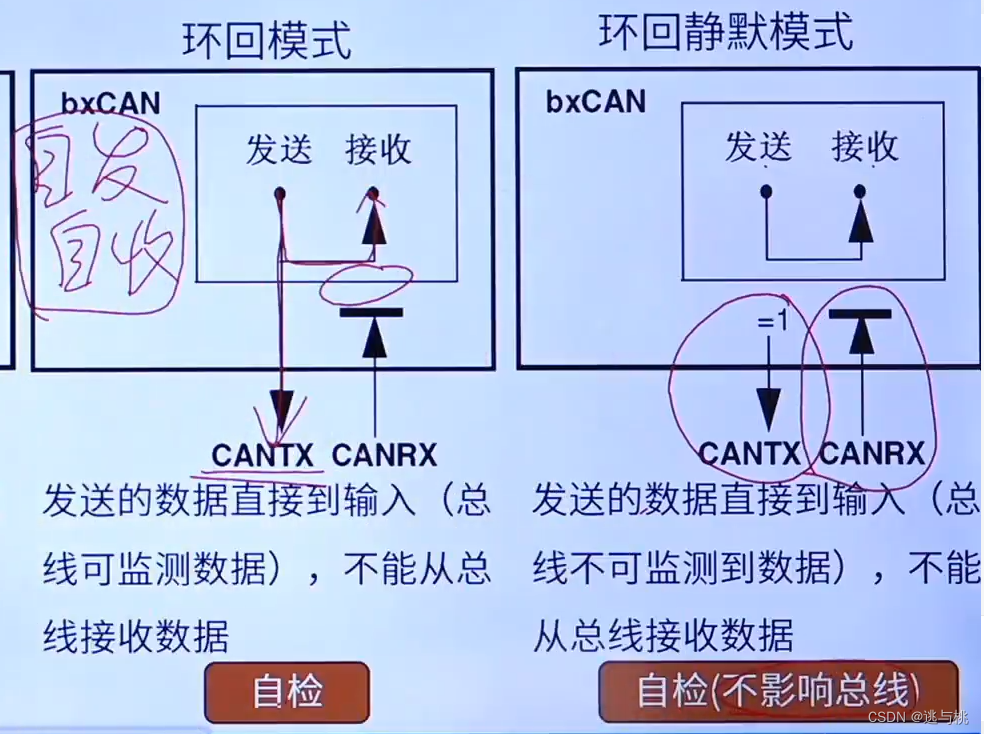
<二>CAN控制器模式
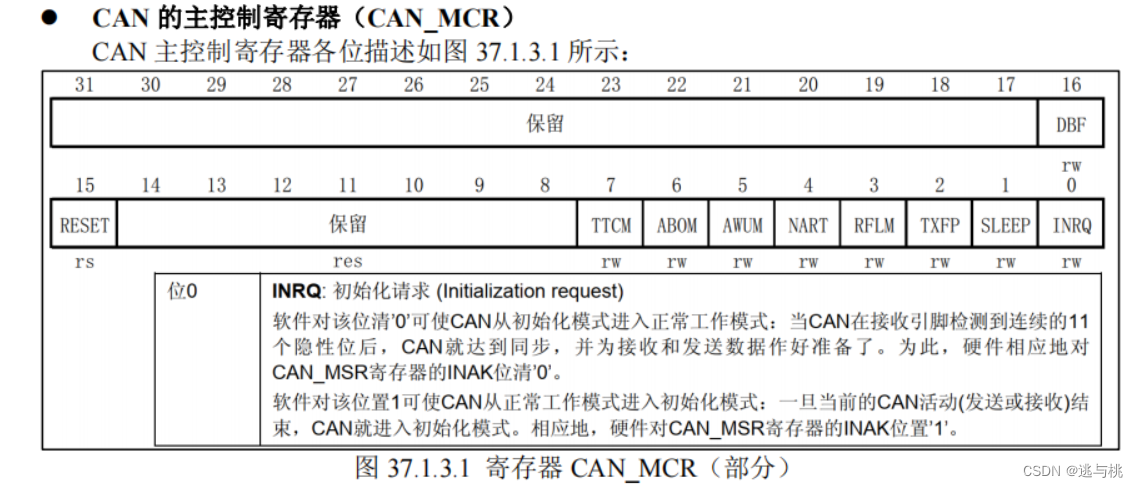
CAN控制器的工作模式有三种:初始化模式、正常模式和睡眠模式。
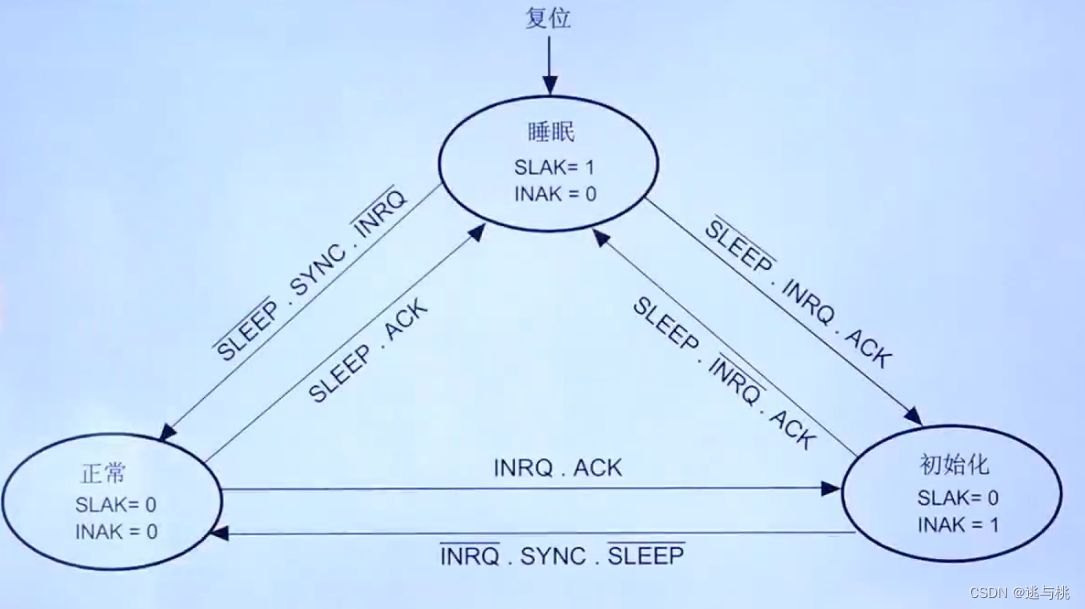
CAN控制器的测试模式有三种:静默模式、环回模式和环回静默模式。(初始化模式下进行配置)
<三>CAN控制器框图(F1)
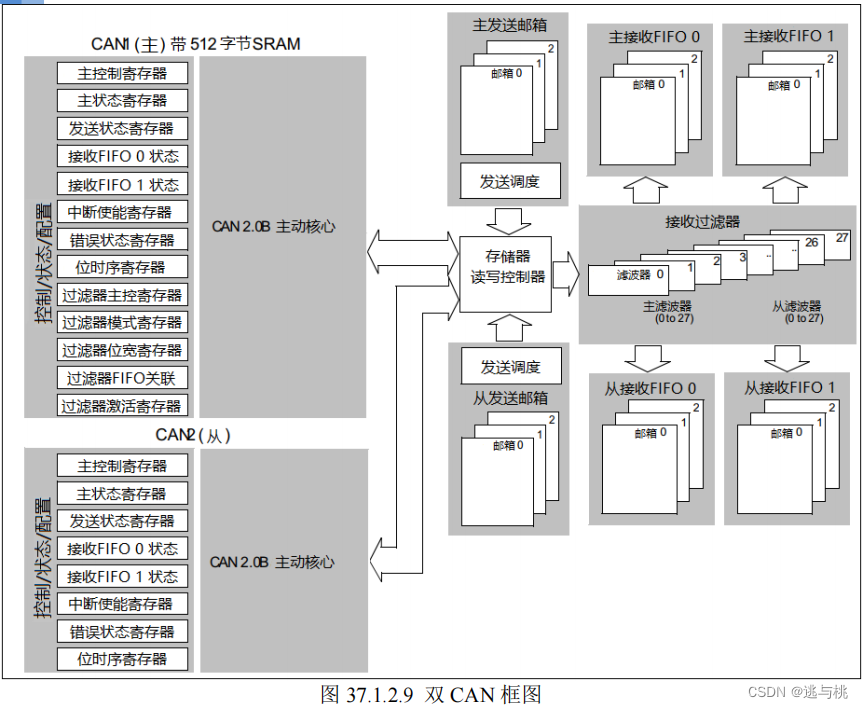
 接收过滤器
接收过滤器
当总线上报文数据量很大时,总线上的设备会频繁获取报文,占用CPU。过滤器的存在,选择性接收有效报文,减轻系统负担。
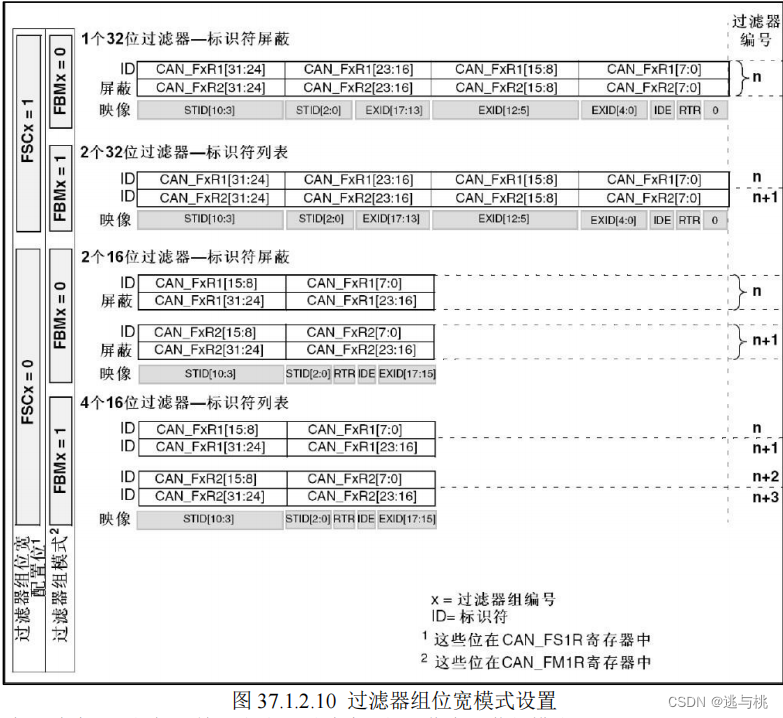
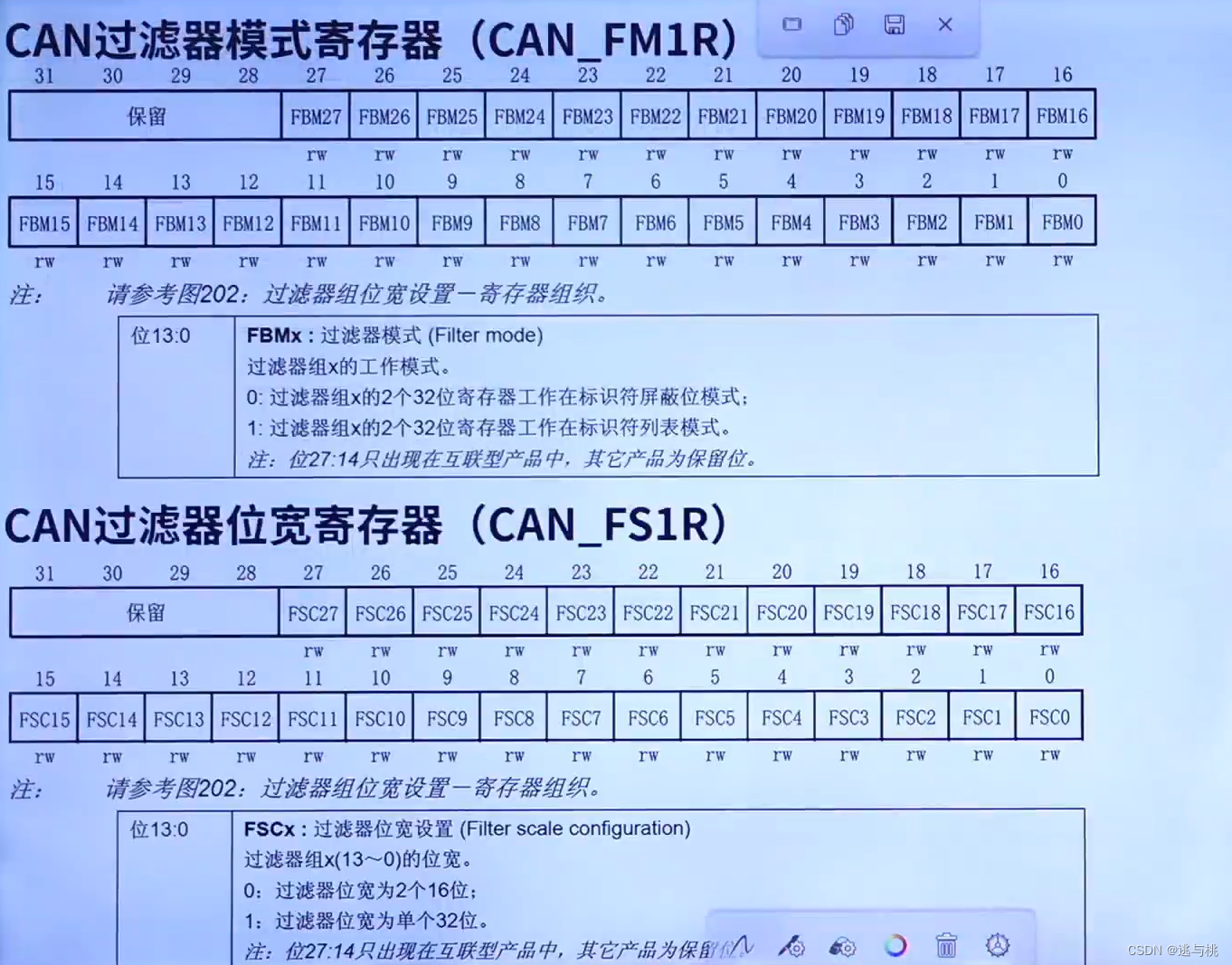
每个过滤器组都有两个32位寄存器CAN_FxR1和CAN_FxR2。根据过滤器组的工作模式不同(位宽和选择模式),寄存器的作用不尽相同。
位宽可设置32位或16位,寄存器存储的内容就有所区别。
| 过滤器组Reg | 32位 | 16位(寄存器由两部分组成) |
| CAN_FxR1 | STDID[10:0]、EXTID[17:0]、IDE、RTR | STDID[10:0]、EXTID[17:15]、IDE、RTR |
| CAN_FxR2 | STDID[10:0]、EXTID[17:0]、IDE、RTR | STDID[10:0]、EXTID[17:15]、IDE、RTR |
选择模式可设置屏蔽位模式或标识符列表模式,寄存器内容的功能就有所区别。
屏蔽位模式,可以选择出一组符合条件的报文。寄存器内容功能相当于是否符合条件。
注意:REG中bit值代表的是匹配与否:1必须匹配,0不用关心。
<四>CAN控制器位时序
三.CAN相关寄存器介绍
四.CAN 相关HAL库驱动介绍
| 驱动函数 | 关联寄存器 | 功能描述 |
| __HAL_RCC_CANx_CLK_ENBALE() | 使能CAN时钟 | |
| HAL_CAN_Init() | MCR/BTR | 初始化CAN |
| HAL_CAN_ConfigFilter() | 过滤器寄存器 | 配置CAN接收过滤器 |
| HAL_CAN_Start() | MCR/MSR | 启动CAN设备 |
| HAL_CAN_ActivateNotification() | IER | 使能中断 |
| __HAL_CAN_ENABLE_IT() | IER | 使能CAN中断允许 |
| HAL_CAN_AddTxMessages() | TSR/TIxTR/TDTxR/TDLxR/TDHxR | 发送消息 |
| HAL_CAN_GetTxMailboxesFreeLevel() | TSR | 等待发送完成 |
| HAL_CAN_GetRxFifoFillLevel() | RF0R/RF1R | 等待接收完成 |
| HAL_CAN_GetRxMessage() | RF0R/RF1R/TDLxR/TDHxR | 接收消息 |


五.CAN基本驱动步骤
<一>.CAN参数初始化 --- 工作模式、波特率等(HAL_CAN_Init)
<二>.使能CAN时钟和初始化相关引脚 --- GPIO模式设为复用功能模式(HAL_CAN_MspInit)
<三>.设置过滤器 --- HAL_CAN_ConfigFilter 完成过滤器的初始化
<四>.CAN数据接收和发送 --- HAL_CAN_AddTxMessage 发送消息;HAL_CAN_GetRxMessage 接收消息
<五>.使能CAN相关中断/设置NVIC/编写中断服务函数(可选) --- __HAL_CAN_ENABLE_IT
六.代码
使用回环模式实现自发自收
can.c
#include "./BSP/CAN/can.h"
#include "./BSP/LED/led.h"
#include "./SYSTEM/delay/delay.h"
#include "./SYSTEM/usart/usart.h"
CAN_HandleTypeDef g_canx_handler; /* CANx句柄 */
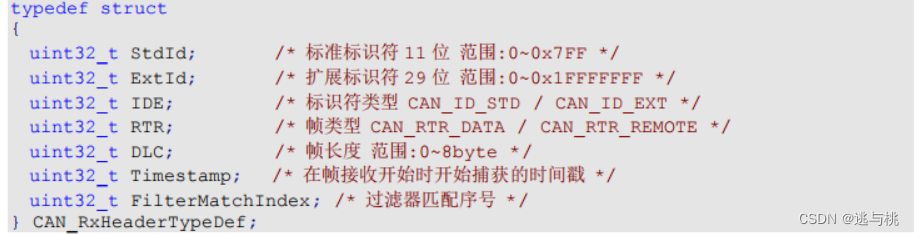
CAN_TxHeaderTypeDef g_canx_txheader; /* 发送参数句柄 */
CAN_RxHeaderTypeDef g_canx_rxheader; /* 接收参数句柄 */
/**
* @brief CAN初始化
* @param tsjw : 重新同步跳跃时间单元.范围: 1~3;
* @param tbs2 : 时间段2的时间单元.范围: 1~8;
* @param tbs1 : 时间段1的时间单元.范围: 1~16;
* @param brp : 波特率分频器.范围: 1~1024;
* @note 以上4个参数, 在函数内部会减1, 所以, 任何一个参数都不能等于0
* CAN挂在APB1上面, 其输入时钟频率为 Fpclk1 = PCLK1 = 36Mhz
* tq = brp * tpclk1;
* 波特率 = Fpclk1 / ((tbs1 + tbs2 + 1) * brp);
* 我们设置 can_init(1, 8, 9, 4, 1), 则CAN波特率为:
* 36M / ((8 + 9 + 1) * 4) = 500Kbps
*
* @param mode : CAN_MODE_NORMAL, 正常模式;
CAN_MODE_LOOPBACK,回环模式;
* @retval 0, 初始化成功; 其他, 初始化失败;
*/
uint8_t can_init(uint32_t tsjw, uint32_t tbs2, uint32_t tbs1, uint16_t brp, uint32_t mode)
{
g_canx_handler.Instance = CAN1;
g_canx_handler.Init.Prescaler = brp; /* 分频系数(Fdiv)为brp+1 */
g_canx_handler.Init.Mode = mode; /* 模式设置 */
g_canx_handler.Init.SyncJumpWidth = tsjw; /* 重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1TQ~CAN_SJW_4TQ */
g_canx_handler.Init.TimeSeg1 = tbs1; /* tbs1范围CAN_BS1_1TQ~CAN_BS1_16TQ */
g_canx_handler.Init.TimeSeg2 = tbs2; /* tbs2范围CAN_BS2_1TQ~CAN_BS2_8TQ */
g_canx_handler.Init.TimeTriggeredMode = DISABLE; /* 非时间触发通信模式 */
g_canx_handler.Init.AutoBusOff = DISABLE; /* 软件自动离线管理 */
g_canx_handler.Init.AutoWakeUp = DISABLE; /* 睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位) */
g_canx_handler.Init.AutoRetransmission = ENABLE; /* 禁止报文自动传送 */
g_canx_handler.Init.ReceiveFifoLocked = DISABLE; /* 报文不锁定,新的覆盖旧的 */
g_canx_handler.Init.TransmitFifoPriority = DISABLE; /* 优先级由报文标识符决定 */
if (HAL_CAN_Init(&g_canx_handler) != HAL_OK)
{
return 1;
}
#if CAN_RX0_INT_ENABLE
/* 使用中断接收 */
__HAL_CAN_ENABLE_IT(&g_canx_handler, CAN_IT_RX_FIFO0_MSG_PENDING); /* FIFO0消息挂号中断允许 */
HAL_NVIC_EnableIRQ(USB_LP_CAN1_RX0_IRQn); /* 使能CAN中断 */
HAL_NVIC_SetPriority(USB_LP_CAN1_RX0_IRQn, 1, 0); /* 抢占优先级1,子优先级0 */
#endif
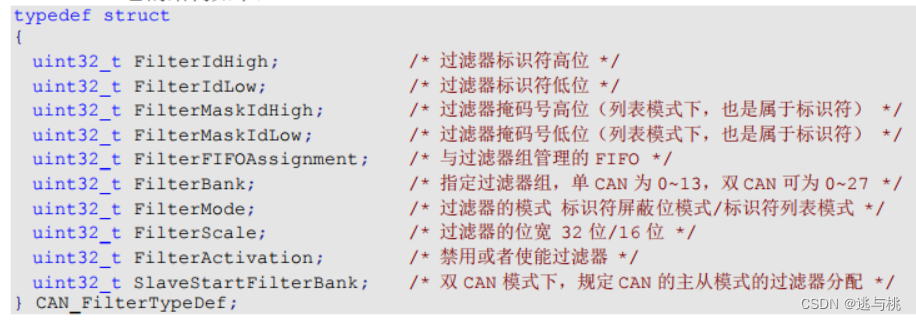
CAN_FilterTypeDef sFilterConfig;
/*配置CAN过滤器*/
sFilterConfig.FilterBank = 0; /* 过滤器0 */
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; /* 标识符屏蔽位模式 */
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; /* 长度32位位宽*/
sFilterConfig.FilterIdHigh = 0x0000; /* 32位ID */
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000; /* 32位MASK */
sFilterConfig.FilterMaskIdLow = 0x0000;
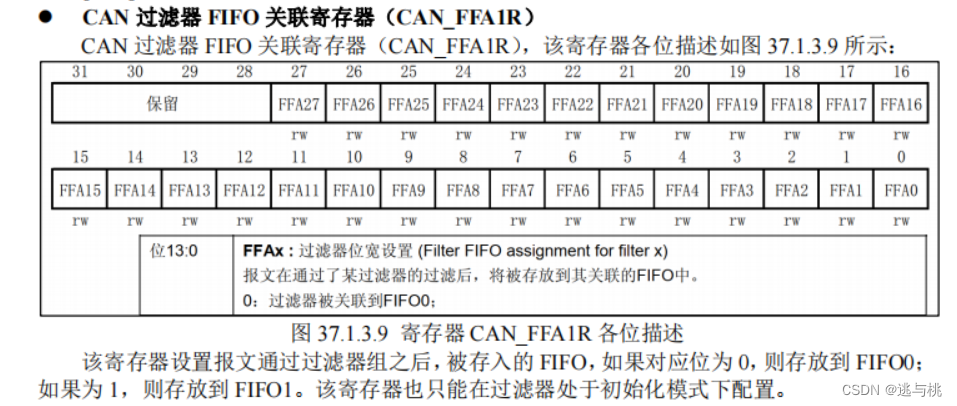
sFilterConfig.FilterFIFOAssignment = CAN_FILTER_FIFO0; /* 过滤器0关联到FIFO0 */
sFilterConfig.FilterActivation = CAN_FILTER_ENABLE; /* 激活滤波器0 */
sFilterConfig.SlaveStartFilterBank = 14;
/* 过滤器配置 */
if (HAL_CAN_ConfigFilter(&g_canx_handler, &sFilterConfig) != HAL_OK)
{
return 2;
}
/* 启动CAN外围设备 */
if (HAL_CAN_Start(&g_canx_handler) != HAL_OK)
{
return 3;
}
return 0;
}
/**
* @brief CAN底层驱动,引脚配置,时钟配置,中断配置
此函数会被HAL_CAN_Init()调用
* @param hcan:CAN句柄
* @retval 无
*/
void HAL_CAN_MspInit(CAN_HandleTypeDef *hcan)
{
if (CAN1 == hcan->Instance)
{
CAN_RX_GPIO_CLK_ENABLE(); /* CAN_RX脚时钟使能 */
CAN_TX_GPIO_CLK_ENABLE(); /* CAN_TX脚时钟使能 */
__HAL_RCC_CAN1_CLK_ENABLE(); /* 使能CAN1时钟 */
GPIO_InitTypeDef gpio_initure;
gpio_initure.Pin = CAN_TX_GPIO_PIN;
gpio_initure.Mode = GPIO_MODE_AF_PP;
gpio_initure.Pull = GPIO_PULLUP;
gpio_initure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(CAN_TX_GPIO_PORT, &gpio_initure); /* CAN_TX脚 模式设置 */
gpio_initure.Pin = CAN_RX_GPIO_PIN;
gpio_initure.Mode = GPIO_MODE_AF_INPUT;
HAL_GPIO_Init(CAN_RX_GPIO_PORT, &gpio_initure); /* CAN_RX脚 必须设置成输入模式 */
}
}
#if CAN_RX0_INT_ENABLE /* 使能RX0中断 */
/**
* @brief CAN RX0 中断服务函数
* @note 处理CAN FIFO0的接收中断
* @param 无
* @retval 无
*/
void USB_LP_CAN1_RX0_IRQHandler(void)
{
uint8_t rxbuf[8];
uint32_t id;
uint8_t ide, rtr, len;
can_receive_msg(id, rxbuf);
printf("id:%d\r\n", g_canx_rxheader.StdId);
printf("ide:%d\r\n", g_canx_rxheader.IDE);
printf("rtr:%d\r\n", g_canx_rxheader.RTR);
printf("len:%d\r\n", g_canx_rxheader.DLC);
printf("rxbuf[0]:%d\r\n", rxbuf[0]);
printf("rxbuf[1]:%d\r\n", rxbuf[1]);
printf("rxbuf[2]:%d\r\n", rxbuf[2]);
printf("rxbuf[3]:%d\r\n", rxbuf[3]);
printf("rxbuf[4]:%d\r\n", rxbuf[4]);
printf("rxbuf[5]:%d\r\n", rxbuf[5]);
printf("rxbuf[6]:%d\r\n", rxbuf[6]);
printf("rxbuf[7]:%d\r\n", rxbuf[7]);
}
#endif
/**
* @brief CAN 发送一组数据
* @note 发送格式固定为: 标准ID, 数据帧
* @param id : 标准ID(11位)
* @retval 发送状态 0, 成功; 1, 失败;
*/
uint8_t can_send_msg(uint32_t id, uint8_t *msg, uint8_t len)
{
uint32_t TxMailbox = CAN_TX_MAILBOX0;
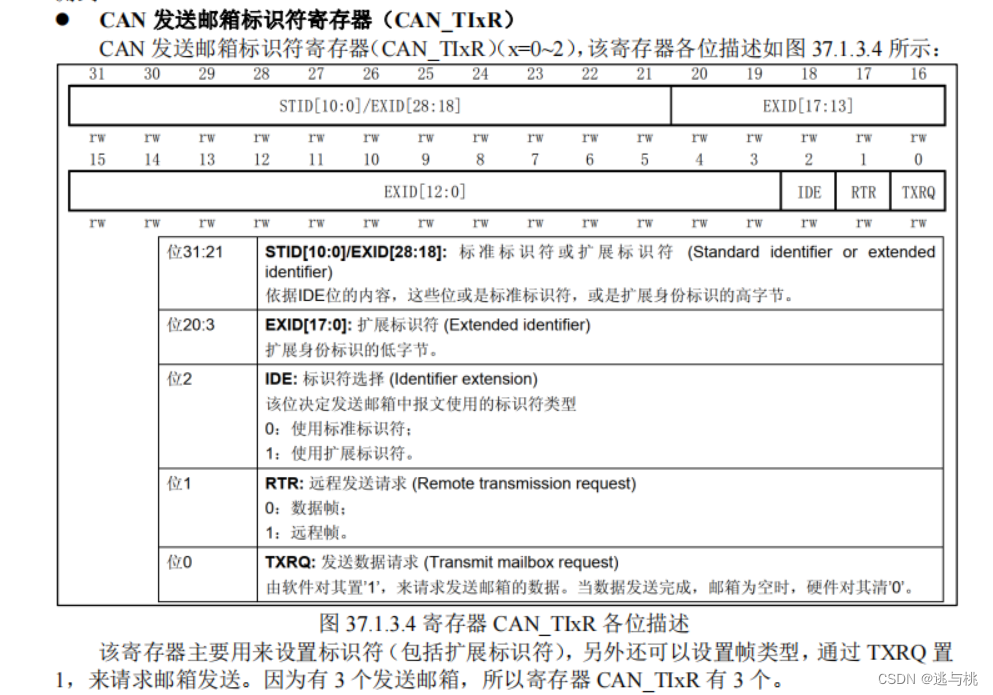
g_canx_txheader.StdId = id; /* 标准标识符 */
g_canx_txheader.ExtId = id; /* 扩展标识符(29位) 标准标识符情况下,该成员无效*/
g_canx_txheader.IDE = CAN_ID_STD; /* 使用标准标识符 */
g_canx_txheader.RTR = CAN_RTR_DATA; /* 数据帧 */
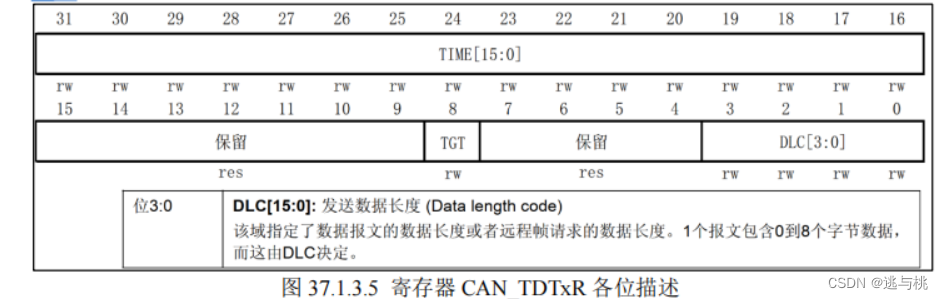
g_canx_txheader.DLC = len;
if (HAL_CAN_AddTxMessage(&g_canx_handler, &g_canx_txheader, msg, &TxMailbox) != HAL_OK) /* 发送消息 */
{
return 1;
}
while (HAL_CAN_GetTxMailboxesFreeLevel(&g_canx_handler) != 3); /* 等待发送完成,所有邮箱(有三个邮箱)为空 */
return 0;
}
/**
* @brief CAN 接收数据查询
* @note 接收数据格式固定为: 标准ID, 数据帧
* @param id : 要查询的 标准ID(11位)
* @param buf : 数据缓存区
* @retval 接收结果
* @arg 0 , 无数据被接收到;
* @arg 其他, 接收的数据长度
*/
uint8_t can_receive_msg(uint32_t id, uint8_t *buf)
{
if (HAL_CAN_GetRxFifoFillLevel(&g_canx_handler, CAN_RX_FIFO0) == 0) /* 没有接收到数据 */
{
return 0;
}
if (HAL_CAN_GetRxMessage(&g_canx_handler, CAN_RX_FIFO0, &g_canx_rxheader, buf) != HAL_OK) /* 读取数据 */
{
return 0;
}
if (g_canx_rxheader.StdId!= id || g_canx_rxheader.IDE != CAN_ID_STD || g_canx_rxheader.RTR != CAN_RTR_DATA) /* 接收到的ID不对 / 不是标准帧 / 不是数据帧 */
{
return 0;
}
return g_canx_rxheader.DLC;
}
can.h
#ifndef __CAN_H
#define __CAN_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* CAN 引脚 定义 */
#define CAN_RX_GPIO_PORT GPIOA
#define CAN_RX_GPIO_PIN GPIO_PIN_11
#define CAN_RX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
#define CAN_TX_GPIO_PORT GPIOA
#define CAN_TX_GPIO_PIN GPIO_PIN_12
#define CAN_TX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
/******************************************************************************************/
/* CAN接收RX0中断使能 */
#define CAN_RX0_INT_ENABLE 0 /* 0,不使能; 1,使能; */
/* 对外接口函数 */
uint8_t can_receive_msg(uint32_t id, uint8_t *buf); /* CAN接收数据, 查询 */
uint8_t can_send_msg(uint32_t id, uint8_t *msg, uint8_t len); /* CAN发送数据 */
uint8_t can_init(uint32_t tsjw,uint32_t tbs2,uint32_t tbs1,uint16_t brp,uint32_t mode); /* CAN初始化 */
#endif
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./USMART/usmart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
#include "./BSP/CAN/can.h"
int main(void)
{
uint8_t key;
uint8_t i = 0, t = 0;
uint8_t cnt = 0;
uint8_t canbuf[8];
uint8_t rxlen = 0;
uint8_t res;
uint8_t mode = 1; /* CAN工作模式: 0,正常模式; 1,回环模式 */
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
usmart_dev.init(72); /* 初始化USMART */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
can_init(CAN_SJW_1TQ, CAN_BS2_8TQ, CAN_BS1_9TQ, 4, CAN_MODE_LOOPBACK); /* CAN初始化, 回环模式, 波特率500Kbps */
lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);
lcd_show_string(30, 70, 200, 16, 16, "CAN TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
lcd_show_string(30, 110, 200, 16, 16, "LoopBack Mode", RED);
lcd_show_string(30, 130, 200, 16, 16, "KEY0:Send KEK_UP:Mode", RED); /* 显示提示信息 */
lcd_show_string(30, 150, 200, 16, 16, "Count:", RED); /* 显示当前计数值 */
lcd_show_string(30, 170, 200, 16, 16, "Send Data:", RED); /* 提示发送的数据 */
lcd_show_string(30, 230, 200, 16, 16, "Receive Data:", RED); /* 提示接收到的数据 */
while (1)
{
key = key_scan(0);
if (key == KEY0_PRES) /* KEY0按下,发送一次数据 */
{
for (i = 0; i < 8; i++)
{
canbuf[i] = cnt + i; /* 填充发送缓冲区 */
if (i < 4)
{
lcd_show_xnum(30 + i * 32, 190, canbuf[i], 3, 16, 0X80, BLUE); /* 显示数据 */
}
else
{
lcd_show_xnum(30 + (i - 4) * 32, 210, canbuf[i], 3, 16, 0X80, BLUE); /* 显示数据 */
}
}
res = can_send_msg(0X12, canbuf, 8); /* ID = 0X12, 发送8个字节 */
if (res)
{
lcd_show_string(30 + 80, 170, 200, 16, 16, "Failed", BLUE); /* 提示发送失败 */
}
else
{
lcd_show_string(30 + 80, 170, 200, 16, 16, "OK ", BLUE); /* 提示发送成功 */
}
}
else if (key == WKUP_PRES) /* WK_UP按下,改变CAN的工作模式 */
{
mode = !mode;
if (mode == 0) /* 正常模式,需要2个开发板 */
{
can_init(CAN_SJW_1TQ, CAN_BS2_8TQ, CAN_BS1_9TQ, 4, CAN_MODE_NORMAL); /* CAN正常模式初始化, 正常模式, 波特率500Kbps */
lcd_show_string(30, 110, 200, 16, 16, "Nnormal Mode ", RED);
}
else /* 回环模式,一个开发板就可以测试了. */
{
can_init(CAN_SJW_1TQ, CAN_BS2_8TQ, CAN_BS1_9TQ, 4, CAN_MODE_LOOPBACK); /* CAN回环模式初始化, 回环模式, 波特率500Kbps */
lcd_show_string(30, 110, 200, 16, 16, "LoopBack Mode", RED);
}
}
rxlen = can_receive_msg(0X12, canbuf); /* CAN ID = 0X12, 接收数据查询 */
if (rxlen) /* 接收到有数据 */
{
lcd_fill(30, 270, 130, 310, WHITE); /* 清除之前的显示 */
for (i = 0; i < rxlen; i++)
{
if (i < 4)
{
lcd_show_xnum(30 + i * 32, 250, canbuf[i], 3, 16, 0X80, BLUE); /* 显示数据 */
}
else
{
lcd_show_xnum(30 + (i - 4) * 32, 270, canbuf[i], 3, 16, 0X80, BLUE); /* 显示数据 */
}
}
}
t++;
delay_ms(10);
if (t == 20)
{
LED0_TOGGLE(); /* 提示系统正在运行 */
t = 0;
cnt++;
lcd_show_xnum(30 + 48, 150, cnt, 3, 16, 0X80, BLUE); /* 显示数据 */
}
}
}

















 1404
1404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









