







主流车厂激光雷达的选择和布局
激光雷达发布的车型虽然多,但是价格高低,设计性能各不同,俗称外行人看热闹,内行人看门道,激光雷达都有哪些门道了,其实从主机厂关心哪些指标就知道有哪些门道了。
当然价格是车企最关心的第一要素,无论什么先进技术在汽车产品上的落地,还是要考虑价格的适用性,必须在车企能够接受的范围内。
激光雷达早期都是机械雷达,高成本导致一直应用于Robotaxi 等,Velodyne的64线机械激光雷达在8万美元,32线机械激光雷达成本在2万美元。SCALA在国内的单台采购价格一度在 2 万美元级别。虽然SCALA是全球第一款满足车规的激光雷达,但要知道第一代 SCALA 的扫描效果大致相当于 4 线,垂直视场角仅 3.2°。目前能在前装量产车上使用 SCALA 的客户,主要也是欧洲的豪华品牌,无论是奥迪A8还是奔驰S,都是百万级别的豪车。
当前主机厂普遍对于激光雷达的价格期望是:
在L4级自动驾驶系统中,激光雷达的采购价最终能够达到1000 美元以下;
在 L2+自动驾驶系统中,激光雷达长期目标价格能够达到500美元以下;
因为在L4级别的时候整机的销售价格也就越高,主机厂对于激光雷达的价格也就没有那么敏感,同时L4级别的激光雷达的指标也要求更高,指标高意味着需要成本的上升。
意味着激光雷达必须在现在的上万美金的成本上基本上要下降95%的成本,而且性能还能满足L2+级别的需求,这不是天方夜谭,这是实实在在的需求,这意味着必须有激光雷达厂家去挑战并实现它,必须是技术上进行革命性的改变,如果只是小的修修补补,前面的机械式激光雷达的厂家早就实现成本下降了,来看看激光雷达都有哪些组成,衍生出哪些技术方案,有哪些成本是可以下降的?
激光雷达部件较多,每个部件技术选择的不同就会造成效果和成本的不同,这也带来激光雷达技术路线的多元。激光雷达从测距方式、发射方式、光束操作方式、探测方式以及数据处理方式可以分为5 个核心技术,每个核心技术均有不同的技术分支,效果、成本、当前量产难度等均有不同,在5 个核心技术上不同的分支技术选取也导致了各家激光雷达技术路线的不同。
虽然有这么多种激光雷达的分类模式,目前行业统一意见的还是按照扫描部件来进行分类,分为三大类,机械式、半固态、固态三大类,其实也是从成本角度出发分类。
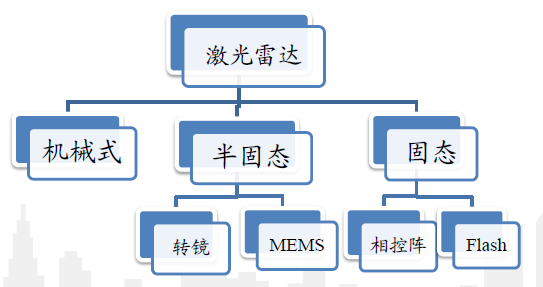
机械旋转式:机械部分(扫描模块)和电子部分(激光收发模块)都在运动——被电机带着360度旋转。
混合固态:激光收发模块是不运动的,只有扫描模块在运动。按扫描模块的运动方式划分,混合固态又分为MEMS、转镜式和棱镜式三种。
纯固态:不仅激光收发模块不运动,而且,扫描模块也没有机械运动。纯固态方案主要有OPA相控和Flash两种。
无论是哪些形式的激光雷达,我们看看激光雷达的成本构成,其实可以看到光电系统就占据70%的成本,而人工调试就占据25%的成本。
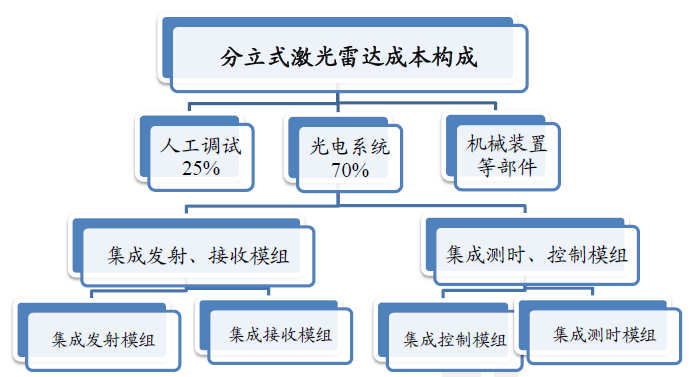
在人工成本这块,最典型的就是机械式雷达,传统激光雷达在制造过程中最耗时的流程就是最后的校准,通常是人工进行。早期Velodyne的64线激光雷达之所以价格高昂,就是一台激光雷达需要一个熟练工一星期的人工校准。
而在目前的光电系统中,扫描部件是最大成本单元也直接影响到性能,扫描部件从机械到固态是降本最为有效的手段,所以固态激光雷达替代机械式激光雷达成为降低成本的必然选择。
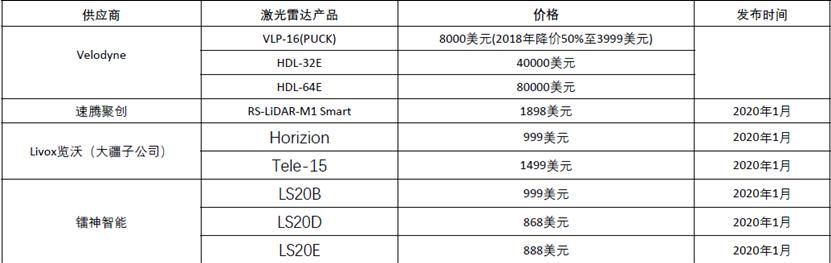
通过上表可以看到,进入2020年以后,激光雷达成本大幅度下降,直接从上万美元进入到1000美元之内的期间,让越来越多的车企可以看到希望,接近上车的批量价格。
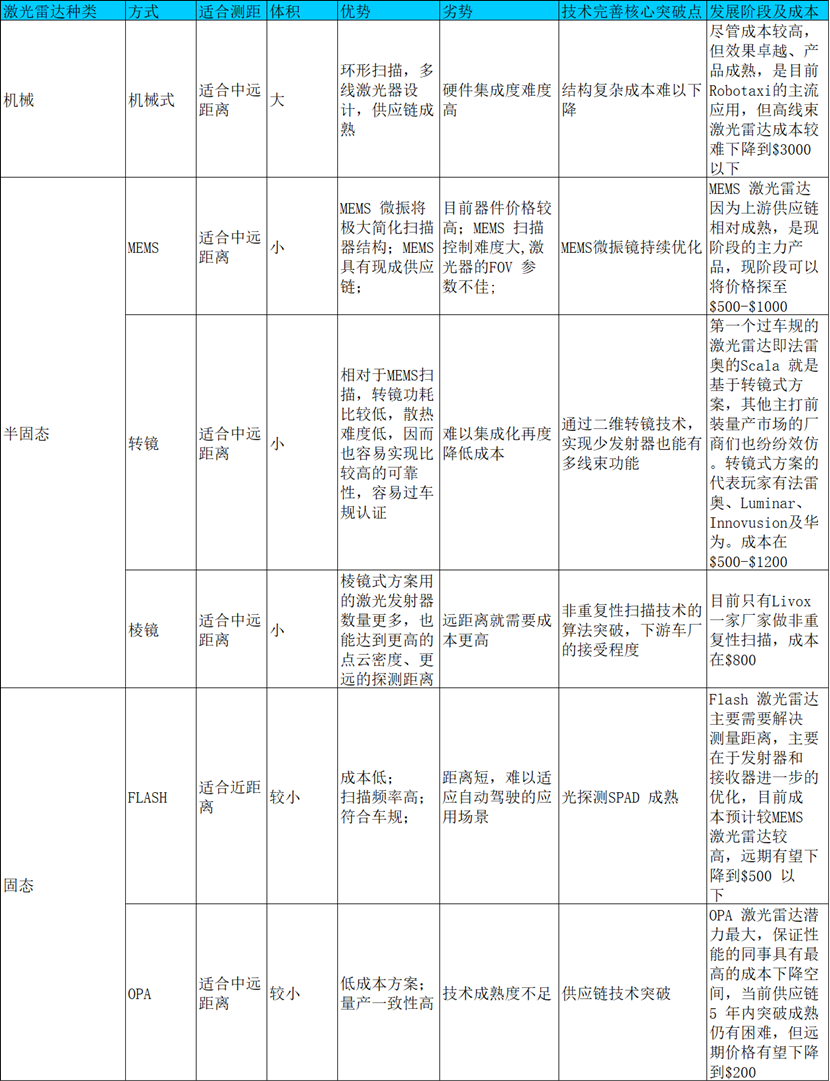
根据扫描方式的不同,目前激光雷达技术路线主要为机械、MEMS、Flash 和OPA 四种。每个技术路线各有自己的优劣势,同时也有自身亟待解决提升完善产品的核心痛点。从目前产品的成熟度来看,MEMS 激光雷达将是当下主流方案,OPA 潜力最大,FLASH 光探测痛点解决潜力也较为显著。
机械旋转式激光雷达主要卖给Robotaxi的测试车队,由于需求量少,Robotaxi客户对激光雷达价格的敏感度并不高;并且,这些B端客户对激光雷达的技术成熟度、可靠性会有一个比较理性的预期,为确保安全,他们也会严格遵循厂商提供的使用期限,如果超期,会及时更换。此外,他们还会安排专人对激光雷达做定期的检查、维护,有问题也可及时发现。
但是在私家车上,终端消费者是没有能力去定期检查和维护的。
基于以上相关缺点,基本上注定机械式的激光雷达无缘在乘用车上大批量的使用。
如华为不做Robotaix测试市场,所以跳过了机械旋转式方案,直接从混合固态开始;而在机械旋转式激光市场上最具有竞争力的禾赛,也在开发面向前装量产市场的混合固态产品(MEMS、转镜)。
可以看到目前主流发布的几款车型的激光雷达全部无一例外的属于半固态激光雷达;小鹏P5的Livos 棱镜方案、蔚来ET7的 Innovusion 属于转镜方案、阿尔法S华为HI版的激光雷达属于转镜方案,车企主要采用半固态基于以下原因。
一是,半固态较机械式激光雷达更易降低成本,同时与纯固态(OPA、Flash)相比,技术相对成熟,更易实现商业化落地。
二是,转镜方案(法雷奥为代表)是第一个过车规、成本可控,可满足车企性能要求,且实现批量供货的技术方案。
当然也有斜杠青年,直接选择一条吃“螃蟹”道路,长城摩卡选择Ibeo公司提供的Flash 纯固态激光雷达ibeoNext,探测距离只有130米,纯固态激光雷达不仅体积小,而且由于没有运动部件,可靠性也更高,待技术成熟之后,其成本也会更低。
做长探测距离,有两个手段:提高激光发射器的功率,提高激光探测器的感光灵敏度。现阶段,这两款技术都还不成熟。等这两块技术都成熟了,并且成本也可接受了,Flash为代表的纯固态将成为主流。
现在由于摩卡还没有那么快交付,所以是骡子是马,是否能吃到“螃蟹”,最终还得上市后见分晓。

主流车厂激光雷达的选择和布局
价格对于问题解决了,再来看看激光雷达相关的性能指标,无论是OEM还是激光雷达厂家都达成共识,高速、拥堵等场景的自动驾驶是最大的市场,视觉加激光雷达最容易实现,因此车企对于激光雷达在L2+的性能要求如下。
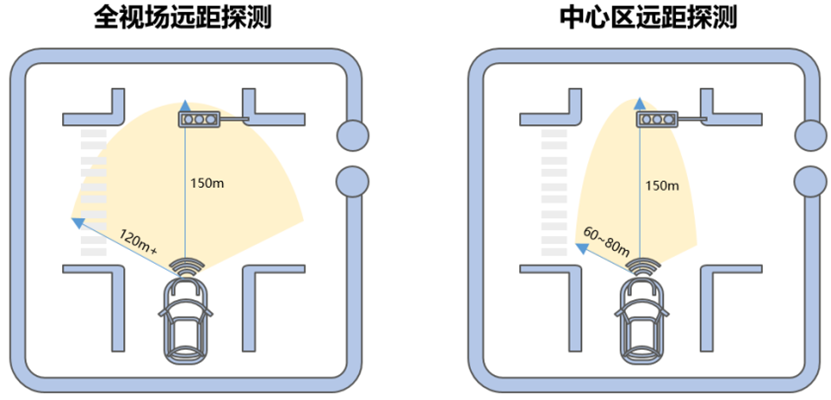
1、测距距离有要求,高速场景下至少有150米以上的探测距离;
2、具有120°FOV宽视角,满足十字路口等特殊场景的检测;
3、测距的精准度,满足≤3cm,角分辨率越小越好,水平和垂直≤0.3°;
4、具备100 线以上的扫描效果和百万级别点频,这样遇到 150 米以外的物体也能反射回足够多的激光点云用于识别;
5、具有车规级标准的工作温度,能够规模化生产。
6、体积一定要小,方便车企的造型设计
看起来不复杂,其实要满足这些条件的激光雷达厂家,目前基本上还寥寥无几,或多或少有部分不满足,这些和激光雷达的技术路线都密切相关。
首先是测距距离,这个是车企最关心的问题,选择激光雷达就是为了能够快速建立远距离的测距能力,行业里面标准测试是针对低反射物料(10%的反射率)的探测距离,至少需要150米能够识别黑色车辆这样低反射率的物体。我们可以看到蔚来ET7、上汽R ES33的激光雷达都宣称最远探测距离500米,针对10%的低反射物体的探测距离达到250米,这个距离非常OK,完全满足要求,他们选用的光源是1550纳米的激光发射器,所以探测距离更远和信噪比更高。
在十字路口这样的场景下,需要大角度FOV的雷达探测能力,目前做到这个大角度的激光雷达非常不容易,
MEMS 难点是信噪比和有效距离及 FOV 太窄。首先,MEMS 激光雷达接收端的收光孔径非常小,远低于机械激光雷达,而信号光发射&接收峰值功率与接收器孔径面积成正比,这意味着信噪比降低。然后,因为通常 MEMS 方案只用一组发射激光和接收装置,那么信号光功率必定远低于机械激光雷达,这导致功率进一步下降,就意味着信噪比的降低,同时也意味着有效距离的缩短。
目前传统的MEMS 技术的激光雷达常见的FOV角度只能达到30°,探测距离50米左右,所以目前还没有看到国内的新能源汽车采用MEMS技术激光雷达。
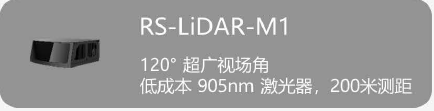
当然这个MEMS领域也有吃“螃蟹”车企,Lucid 官方披露,其使用的激光雷达等效 125 线,其实就是速腾聚创的M1,这个是速腾聚创突破了非常多的技术才达到120°宽视角,最大200米测距,在10%低反射物料探测距离150米的产品。
点频指的是每秒钟激光打到障碍物上反射回来被探测器接收到的激光雷达点数。点云数量是实现精准感知的基础,点频越高则原始感知数据越准确详细,线束线数主要影响的是针对远距目标返回的点云数量。
这两个直接就影响到探测的精度了,如果返回来的数量不足,比如一辆车150米后,返回来只有几个点云数量,这个对于识别的构建非常大的挑战。
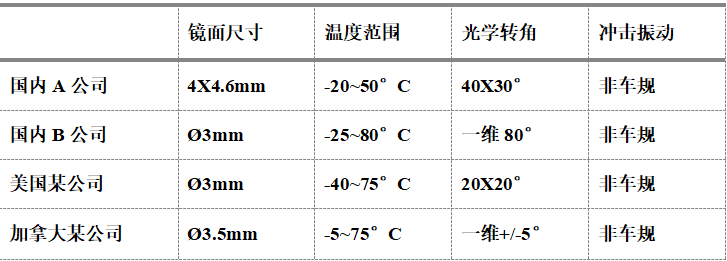
车规级目前对于激光雷达厂家来说,是除了上述技术难度以外最大的一个挑战,特别是温度和振动这两项,还是举目前遇到车规最大难题的MEMS的激光雷达。
硅基MEMS作为半导体工艺,其线圈都很细地密布在镜面背后,导热性差,对温度极为敏感。车规要求的工作环境为-40℃~85℃,硅基MEMS微振镜在雷达的密闭机壳里面,85℃的环境温度下雷达里面温度至少上升20℃,所以硅基MEMS微振镜的耐热温度至少要做到105℃,而当前,国内外都还没有能达到车规温度要求的硅基MEMS微振镜。
EMC、振动、防水这些都是车规级需要的必须项目,当然温度这个问题其实在车企那边可以有一定的让步空间,比如最开始的特斯拉的显示屏,就不是车规级的温度,就是-20-70℃的屏,为了快速导入市场,这个也是一个可以接受的温度范围。
半固态激光雷达,多数以牺牲激光雷达的水平视场角、点频等性能参数,来换取成本降低,以及体积与重量等参数的优化。
最后谈谈产品尺寸。车企对于整车的外观设计要求极高,毕竟目前消费者买车外观因素占据非常大的影响,激光雷达需要和车体完美结合。


上图就是常见的机械式激光雷达车的造型,是不是有丑出三界的感觉,就是天灵盖上面长了一个大犄角,买回家估计能把小孩吓哭咯,占的体检大,完全不能直接放置在车内。
再来看看最新上市的激光雷达布置的位置
小鹏P5搭载的2颗激光雷达(安装在前保险杠两侧)。

何小鹏对于小鹏使用激光雷达是这样表述的:我们跟传统做第四代自动辅助驾驶的或者他们叫无人驾驶的公司不太一样,他们是用激光雷达为核心画激光雷达的高精地图, 我们不一样,我们是用视觉为核心,以视觉高精地图为核心。因为我们觉得从趋势来看,全球所有的路、交通灯、法规都是以人的眼睛等等角度来看一个世界去开车的,我们认为这是最有效率、最接近真人且最便宜的,且又能够加上激光雷达组合能够把安全做好的事情。说实话,在最开始几年里面我们会把安全的因数放在非常非常非常重的角度, 宁愿我硬件冗余、宁愿软件冗余,也要把安全做好。
其实相当直观:小鹏汽车仍然以视觉为核心感知手段,激光雷达的作用是作为安全冗余,所以看到这颗激光雷达的指标,针对低反射率为10%的物体(如黑色汽车)探测距离150米,横向视场角120度,角分辨率0.16度x 0.2度,点云密度等效于144线激光雷达。
远远低于ET7的250米的探测距离,它更多的是用于安全冗余的作用,而不是做核心感知手段,分布在大灯两侧检测完全满足要求了。
ARCFOX极狐 阿尔法S华为HI版 是首款搭载华为激光雷达的车型,分别在车头和车头两侧安装3颗华为96线激光雷达。


蔚来ET7 则是最特别造型的 ,安装在前挡玻璃的上端,类似长了一个小犄角。

每个车企的激光雷达的布置,其实考虑的因素非常多,激光雷达的角度,承受的温度,振动,激光雷达体积的大小等等,激光雷达的体积越小,越方便整车造型的设计,这个体积就和采用的技术路线,散热密切相关了,所以明白斜杠青年摩卡直接上固态激光雷达了吧,造型必须得帅。
从2015年到现在,有关激光雷达硬件技术路线的问题一直被讨论,直到目前还没有结论,在相当长一段时间,至少会有2-3种技术路线并存。
2021年是激光雷达上车的元年,但是还远远没有达到普及的状态,没有真正的上车量产,技术方面的缺陷的改善,性能的提升,前途光明,道路还依旧曲折。















 293
293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









