







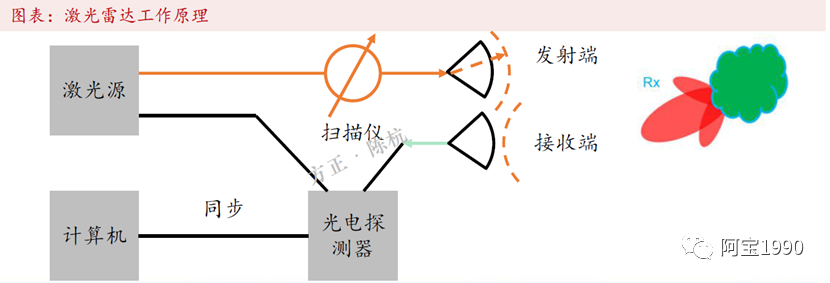
激光雷达可以高精度、高准确度地获取目标的距离、速度等信息或者实现目标成像。激光通过扫描器单元形成光束角度偏转,光束与目标作用形成反射/散射的回波。当接收端工作时,可产生原路返回的回波信号光子到达接收器,接收端通过光电探测器形成信号接收,经过信号处理得到目标的距离、速度等信息或实现三维成像。
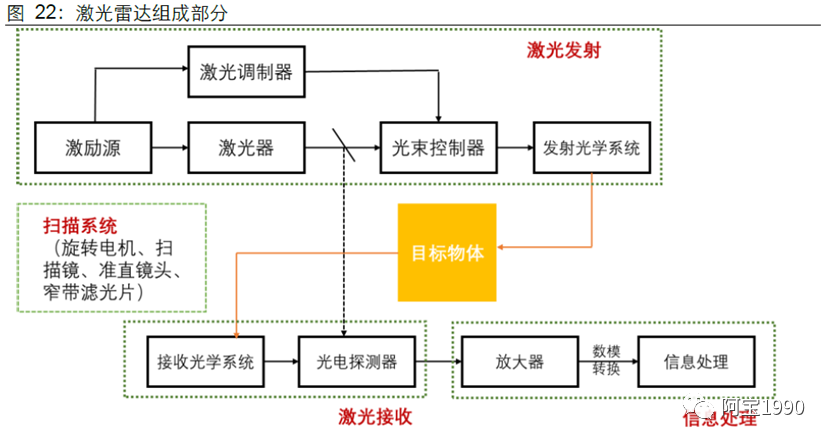
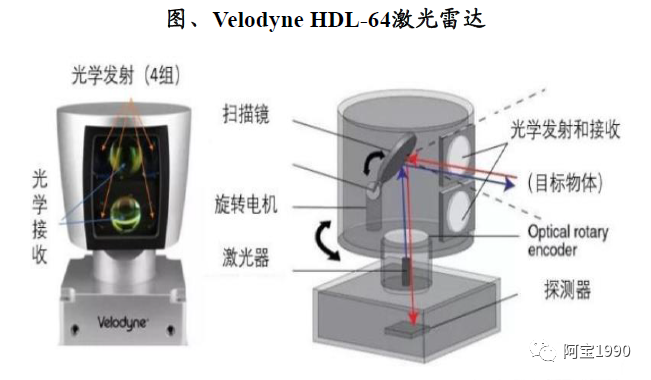
激光雷达主要包括激光发射部分、扫描系统、激光接受部分和信息处理部分,结构较为复杂。从激光雷达的工作来看,主要分成四大部分:
1)激光发射部分:激励源周期性地驱动激光器,发射激光脉冲,激光调制器通过光束控制器控制发射激光的方向和线数,最后通过发射光学系统,将激光发射至目标物体;
2)激光接收系统:经接收光学系统,光电探测器接受目标物体反射回来的激光,产生接收信号;
3)扫描系统,以稳定的转速旋转起来,实现对所在平面的扫描,并产生实时的平面图信息;
4)信息处理系统:接收信号经过放大处理和数模转换,经由信息处理模块计算,获取目标表面形态、物理属性等特性,最终建立物体模型。激光雷达本身结构的复杂性和核心部件的高价格决定激光雷达短期价格,尤其是机械式激光雷达价格短期较高。

主流激光雷达工作原理介绍
激光雷达部件较多,每个部件技术选择的不同就会造成效果和成本的不同,这也带来激光雷达技术路线的多元。激光雷达从测距方式、发射方式、光束操作方式、探测方式以及数据处理方式可以分为5 个核心技术,每个核心技术均有不同的技术分支,效果、成本、当前量产难度等均有不同,在5 个核心技术上不同的分支技术选取也导致了各家激光雷达技术路线的不同。
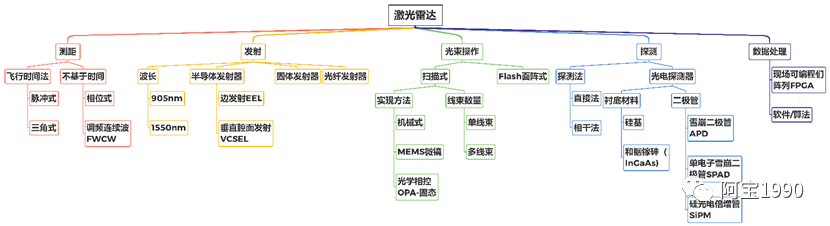
按照扫描方式分类的介绍:
按照扫描方式有无机械转动部件可以分为机械旋转、混合固态、纯固态。混合固态分为MEMS、转镜,纯固态分为相控阵OPA、Flash。
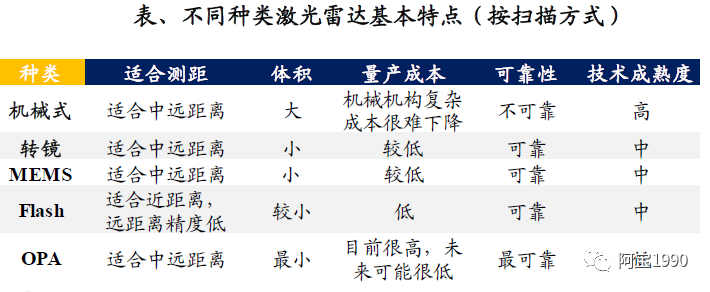
机械式激光雷达:
机械式激光雷达可实现360°扫描,应用于主流无人驾驶测试项目。机械式激光雷达机械旋转式激光雷达的优势在于可以对周围环境进行360°的水平视场扫描,而半固态式和固态式激光雷达往往最高只能做到120°的水平视场扫描,且在视场范围内测距能力的均匀性差于机械旋转式激光雷达。
机械旋转式激光雷达凭借兼具360°水平视场角和测距能力远的优势,目前主流无人驾驶测试项目纷纷采用了机械旋转式激光雷达作为主要的感知传感器。但是它们调试、装配工艺复杂,生产周期长,成本居高不下,并且机械部件寿命不长(约1000-3000小时),难以满足苛刻的车规级要求(至少1万小时以上)。
优点是线束特别丰富(有64线、32线、16线、8线、4线不同的价格层次),性能高ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9868
9868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









