






本文完整的工程代码获取方式放在文末,需要的自行获取。
如需其它模块学习教程,可在评论区留言或私信作者,更新速度嘎嘎快!
目录
获取方法:关注微信公众号<陈加油嗯>,回复"STM32控制TB6612"即可获取源代码。
前言
通过本文可以学到STM32F103C8T6控制两个直流电机转动,正转、反转、调速。
本文使用到的工具:
1.主控芯片STM32F103C8T6;
2.TB6612FNG电机驱动;
3.12V锂电池;
4.四个(左右两边两个电机并联)直流电机;
5.杜邦线若干;
一、TB6612直流电机驱动的介绍
1.TB6612概述
TB6612FNG是一款直流电机驱动器件,它具有大电流MOSFET-H桥结构,其效率高于晶体管H桥驱动器。双通道电路输出,可同时驱动2个电机。相比L293D每通道平均600mA的驱动电流和1.2A的脉冲峰值电流,它的输出负载能力提高了一倍。相比L298N的热耗性和外围二极管续流电路,它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。对于PWM信号,它支持高达100kHz的频率,相对以上2款芯片的5kHz和40kHz也具有较大优势,因此在集成化、小型的电机控制系统中,它可以作为理想的电机驱动器件。
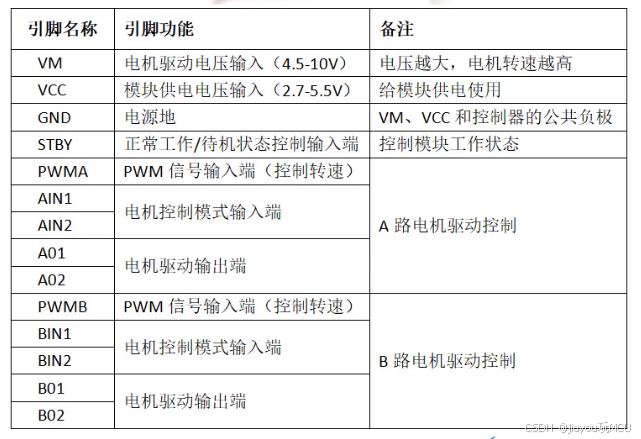
2.TB6612引脚定义
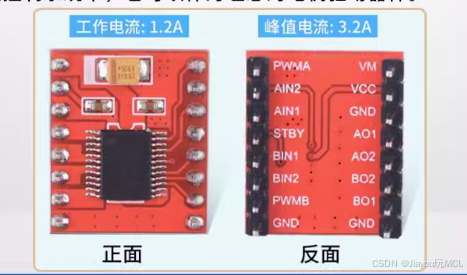
网上买到的TB6612电机驱动模块如上图所示,一共有十六个引脚。我们可以把这些引脚分为四个部分:
①供电引脚,分为两类:电机驱动和模块逻辑供电。电机驱动电压VM端官方建议最高电压不超过10V,但是经过博主实测输入12V电压驱动仍然工作正常(此教程为VM为12V供电)。
②STBY引脚,此引脚为控制电机驱动输出端是否输出,接高电平电机输出、低电平不输出(就是:在控制端输入的信号正常的情况下,STBY接3.3/5V电机转动,接GND电机不转动,相当于电机驱动的总开关)。
③控制端(接单片机IO引脚上),控制端分为转速控制(PWMA、PWMB)和方向控制引脚(AIN1、AIN2、BIN1、BIN2):
PWM引脚接单片机的PWM引脚控制电机的速度(在STM32中通常由定时器产生,占空比越大速度越快);
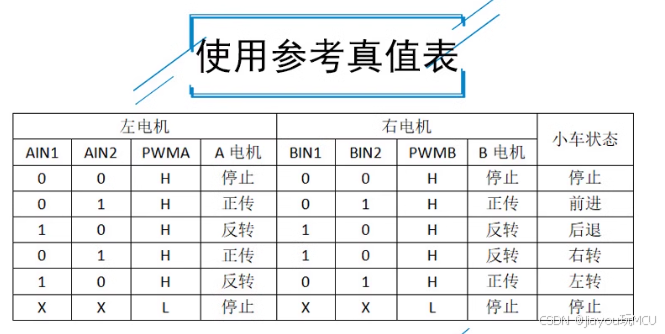
IN引脚接单片机的GPIO,输出高低电平控制电机的方向。(具体看真值表,如下图)
④输出端(接电机的正负极);AO1、AO2为一组,BO1、BO2为另外一组。
二、硬件电路(接线原理图)
1.硬件接线(TB6612电机驱动模块)
| TB6612 | |
| PWMA | STM32-PA7 |
| PWMB | STM32-PA6 |
| AIN2 | STM32-PB5 |
| AIN1 | STM32-PB6 |
| BIN1 | STM32-PB7 |
| BIN2 | STM32-PB8 |
| STBY | 5V |
| VCC | 5V |
| VM | 12V |
| GND | GND |
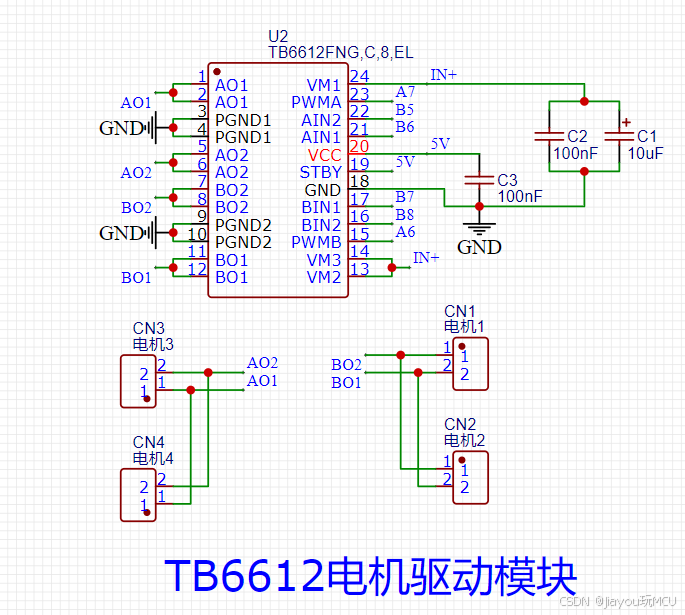
2.电机驱动原理图
Jiayou-01开发板电机驱动原理图(和上面表格的接线一样,没有板子用模块也是一样的),如下图所示:
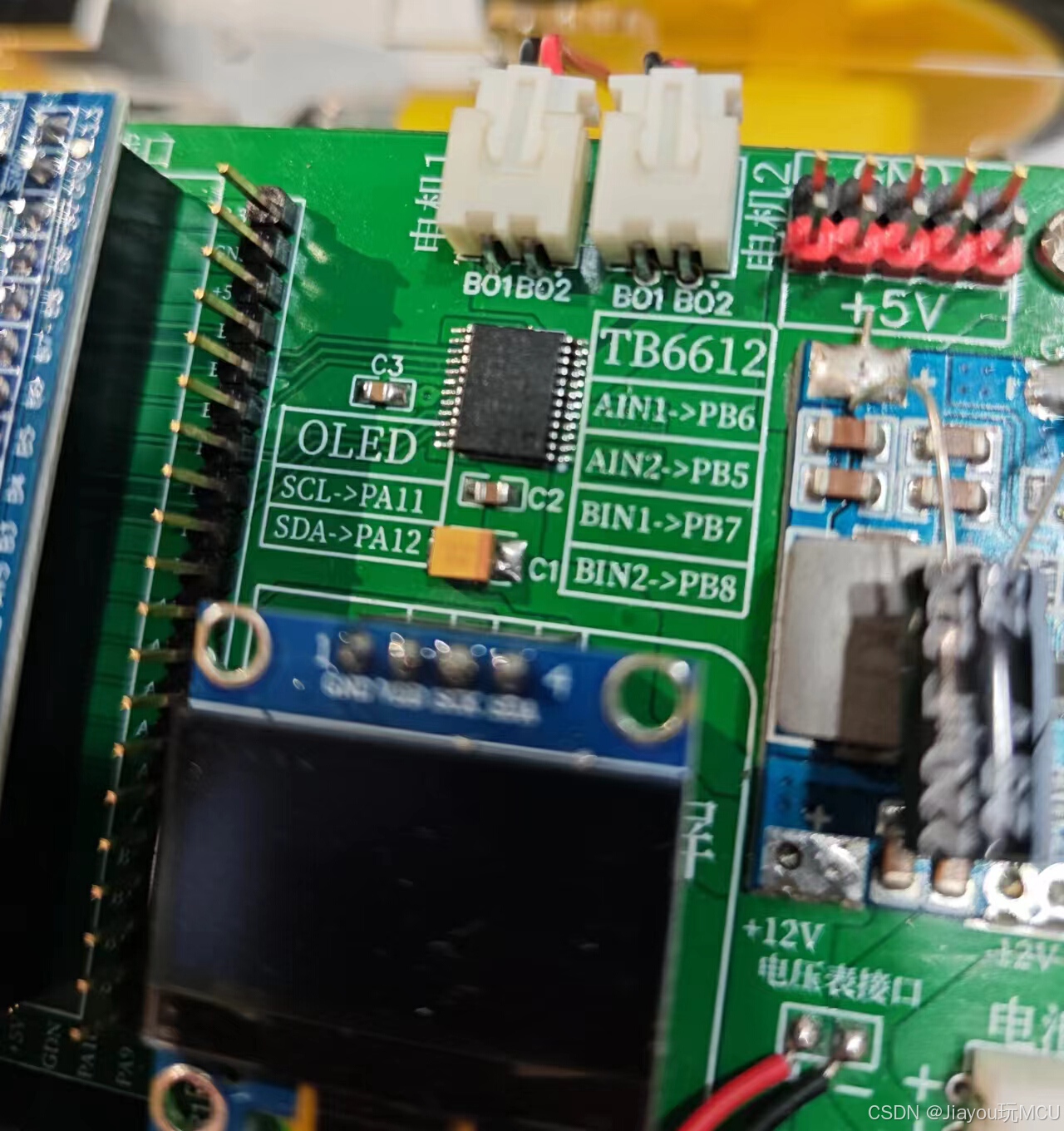
3.接线实物图(Jiayou-01主控板)
三、代码实现
1.电机调速
配置定时器3产生两路PWM,控制TB6612电机驱动实现电机调速,代码如下:
/*
*** TIM3 配置定时器3PWM控制TB6612电机驱动调速 ***
*** PWM频率:10kHz ***
*** 接口:PA6->PWMB PA7->PWMA ***
*** 作者:陈加油嗯 ***
***关注微信公众号学习更多单片机知识:微信搜索“陈加油嗯” ***
*/
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIO外设;————假如要AFIO复用功能模块时钟则要加上( | RCC_APB2Periph_AFIO)
//初始化输出TIM3两个通道PWM脉冲波形的引脚(CH1->PA6 CH2->PA7)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //TIM_CH1、CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channe1234 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR1上的预装载寄存器
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE); //使能TIM 3
}2.控制电机转向
把配置GPIO成输出模式,控制直流电机的转向(配置四个GPIO,两个IO控制一个电机的正反转),认真看其实这是点灯的代码、只不过这里需要四个IO、哈哈哈哈,代码如下:
/*
*** 配置GPIO输出 推挽输出 控制直流电机的转向 ***
*** 接口:PB5->AIN2 PB6->AIN1 PB7->BIN1 PB8->BIN2 ***
*** 作者:陈加油嗯 ***
***关注微信公众号学习更多单片机知识:微信搜索“陈加油嗯” ***
*/
void MOTOR_GPIO_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8; //依次接TB6612引脚AIN1、AIN2、BIN1、BIN2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
3.控制小车状态代码(前后左右运动都可以实现)
自己简单封装了一个函数,输入两个参数就能控制车子的运动,很简单!
代码如下:
/*
*** 控制小车轮子转速、转向函数 ***
*** 参数1:输入范围-7200到+7200 参数为正数小车轮子正转、参数为负数小车轮子反转 ***
*** 参数2:输入范围-7200到+7200 参数为正数小车轮子正转、参数为负数小车轮子反转 ***
*** 作者:陈加油嗯 ***
***关注微信公众号学习更多单片机知识:微信搜索“陈加油嗯” ***
*/
void Set_Car_PWM(int PWM1,int PWM2)
{
if(PWM1>0)
{
TIM_SetCompare1(TIM3,PWM1);
GPIO_SetBits(GPIOB, GPIO_Pin_5);
GPIO_ResetBits(GPIOB, GPIO_Pin_6);
}
if(PWM2>0)
{
TIM_SetCompare2(TIM3,PWM2);
GPIO_SetBits(GPIOB, GPIO_Pin_8);
GPIO_ResetBits(GPIOB, GPIO_Pin_7);
}
if(PWM1<0)
{
TIM_SetCompare1(TIM3,-PWM1);
GPIO_SetBits(GPIOB, GPIO_Pin_6);
GPIO_ResetBits(GPIOB, GPIO_Pin_5);
}
if(PWM2<0)
{
TIM_SetCompare2(TIM3,-PWM2);
GPIO_SetBits(GPIOB, GPIO_Pin_7);
GPIO_ResetBits(GPIOB, GPIO_Pin_8);
}
if(PWM1==0)
{
TIM_SetCompare1(TIM3,0);
GPIO_SetBits(GPIOB, GPIO_Pin_5);
GPIO_SetBits(GPIOB, GPIO_Pin_6);
}
if(PWM2==0)
{
TIM_SetCompare2(TIM3,0);
GPIO_SetBits(GPIOB, GPIO_Pin_7);
GPIO_SetBits(GPIOB, GPIO_Pin_8);
}
}4.主函数代码
初始化定时器3、初始化四个GPIO,前面都封装好了直接调用。最后在while(1)里面写我们的控制函数!
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "TIME.h"
#include "myMOTOR.h"
#include "oled.h"
/*
*** main 主函数代码 ***
*** STM32F103C8T6控制TB6612驱动四个直流电机,调速、正反转 ***
*** 作者:陈加油嗯 ***
***关注微信公众号学习更多单片机知识:微信搜索“陈加油嗯” ***
*/
int main(void)
{
Delay_ms(100);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
TIM3_PWM_Init(7199,0); //定时器PWM模式初始化(10KHZ),用于控制TB6612电机调速
MOTOR_GPIO_Init(); //接TB6612引脚AIN1、AIN2、BIN1、BIN2,控制电机正反转
/* ---------- OLED 显示代码(OLED可不接,控制轮子转动代码照样可以正常运行) ------------- */
OLED_Init(); //OLED初始化
OLED_ColorTurn(0); //0正常显示,1 反色显示
OLED_DisplayTurn(0); //0正常显示 1 屏幕翻转显示
OLED_Clear(); //清屏
//OLED静态显示字符
OLED_ShowString(0,0,"chenjiayou!",16,1);
OLED_Refresh(); //更新显存到OLED(即刷新刚写入的数据,刷新屏幕)
/* -------------------------------- end -------------------------------------------------- */
while(1)
{
Set_Car_PWM(7200,7200); //小车前进
// Set_Car_PWM(-7200,-7200); //小车后退
// Set_Car_PWM(-7200,7200); //小车左转
// Set_Car_PWM(7200,-7200); //小车右转
// Set_Car_PWM(0,0); //小车停止
}
}四、实验现象
根据原理图接好线路,把工程代码下载到STM32F103单片机中,打开电源开关可以看到小车轮子正常转动。(可以根据自己的需求修改代码,可以控制轮子的速度和方向)
五、资料获取(代码)
获取方法:
关注微信公众号<陈加油嗯>,回复"STM32控制TB6612"即可获取源代码。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









