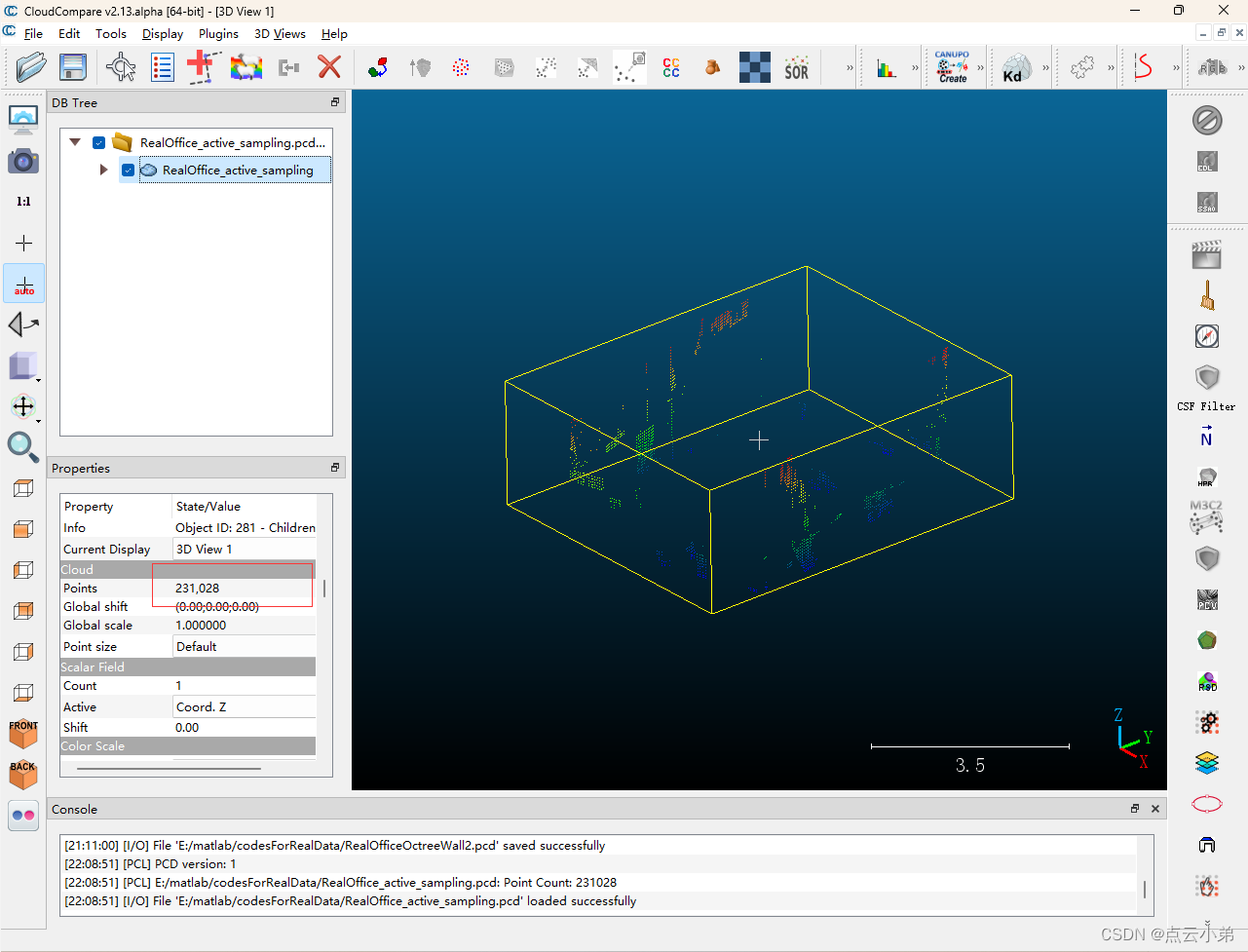
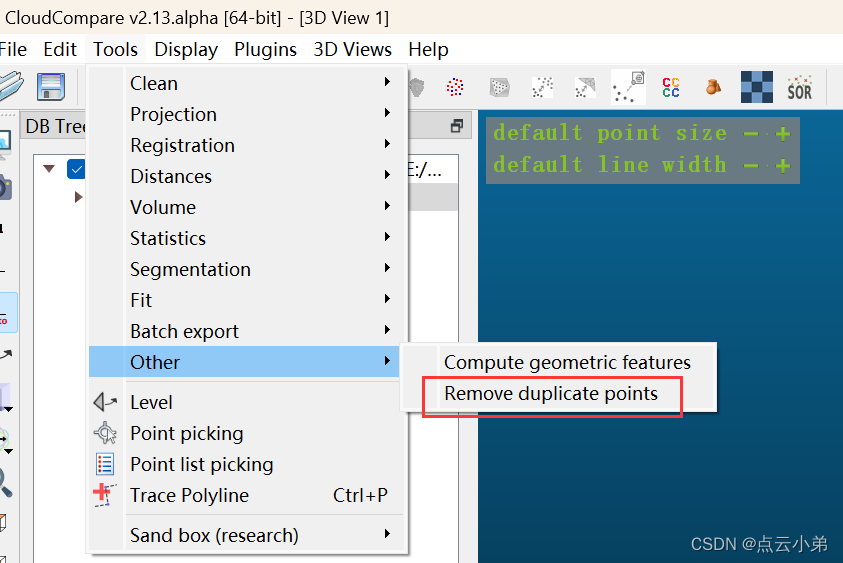
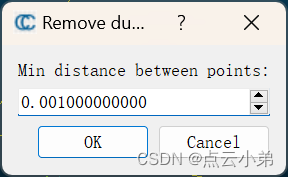
目录 1.数据准备2.点云去重3.完整操作4.相关代码 1.数据准备 自己正好有一个包含大量重复点的点云,如下图所示。此时的点云有231028个点。 2.点云去重 通过Tools > Other > Remove duplicate points菜单访问。这个工具根据点之间的最小距离删除点云中的重复点。 只需要输入点之间的最小距离这一个参数(默认值非常小): 运行后,此时的点云有1237个点。








 本文介绍了如何使用CloudCompare软件删除点云中的重复点。首先进行数据准备,展示了一个含有大量重叠点的点云。接着,在点云去重步骤中,通过菜单选择相关工具,设置点之间最小距离的参数来实现去重。操作完成后,点云的点数量减少。
本文介绍了如何使用CloudCompare软件删除点云中的重复点。首先进行数据准备,展示了一个含有大量重叠点的点云。接着,在点云去重步骤中,通过菜单选择相关工具,设置点之间最小距离的参数来实现去重。操作完成后,点云的点数量减少。



















 1166
1166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








