






00ROS实现流程大致分为5步
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;
- 编辑配置文件;
- 编译并执行。
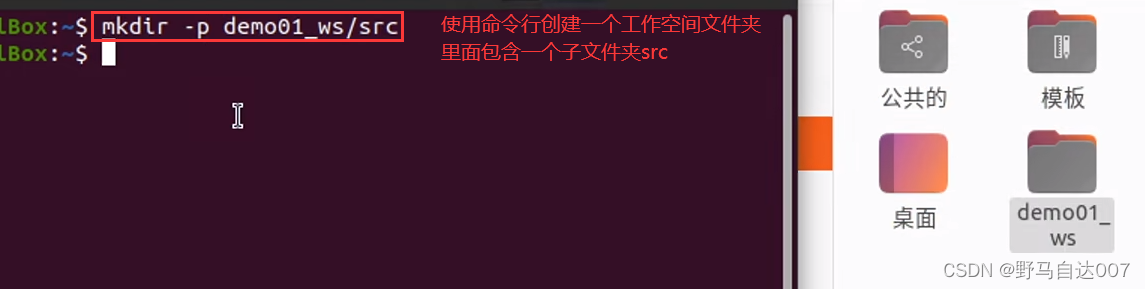
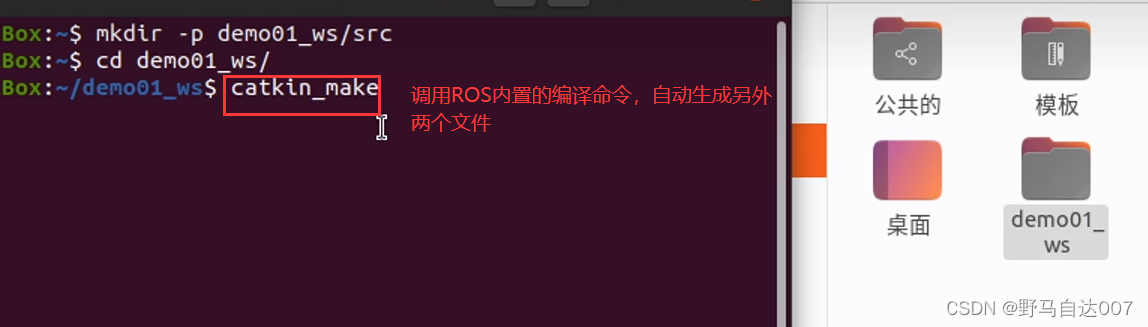
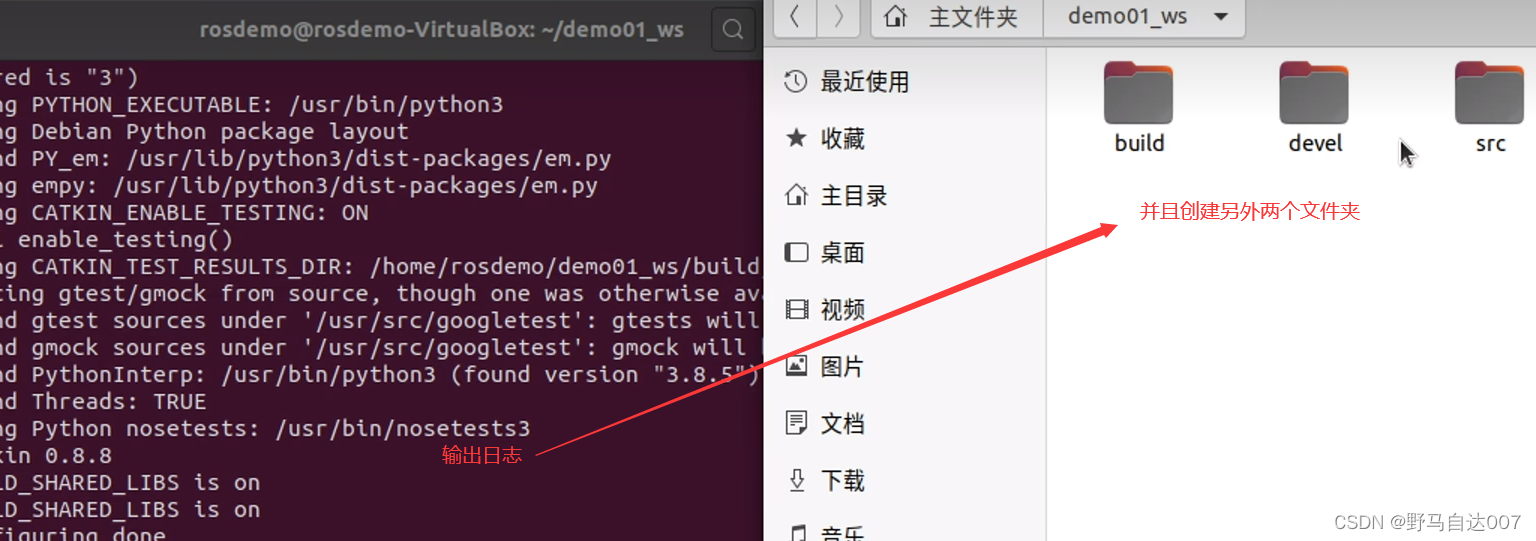
01创建工作空间
02进入src创建ros包并添加依赖
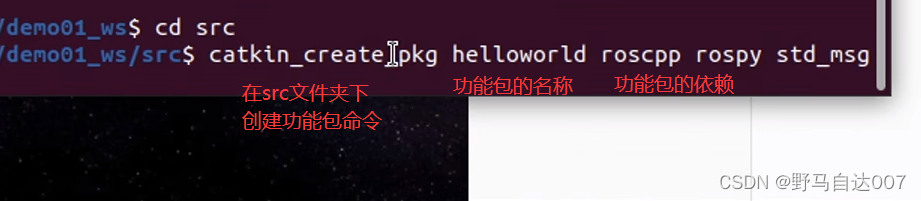
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
 本文详细介绍了ROS(RobotOperatingSystem)的实现流程,包括创建工作空间、创建依赖于roscpp、rospy和std_msgs的功能包,编辑源文件和配置文件,以及最终的编译和执行过程。
本文详细介绍了ROS(RobotOperatingSystem)的实现流程,包括创建工作空间、创建依赖于roscpp、rospy和std_msgs的功能包,编辑源文件和配置文件,以及最终的编译和执行过程。
00ROS实现流程大致分为5步
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;
- 编辑配置文件;
- 编译并执行。
01创建工作空间
02进入src创建ros包并添加依赖
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
 2709
765
196
318
2709
765
196
318











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























