







论文题目
RF-LIO:Removal-First Tightly-coupled Lidar Inertial Odometry in High Dynamic Environments
移除–高动态环境下的首个紧耦合激光雷达惯性测距法
标签
激光SLAM、动态物体移除、LIO-SAM改进、
摘要
提出了RF-LIO,以在高动态环境中进行实时和稳健的状态估计和映射。RF LIO采用了移动物体首先去除的算法,与紧密耦合的LIO相结合,解决了在高动态环境中先去除动态点或先扫描匹配的鸡和蛋的问题。所提出的自适应范围图像移动点去除算法不依赖于任何预先训练数据,也不受移动物体的类别和数量的限制。 然而,RF-LIO仍有一些正在进行的工作。在一个非常开放的环境中,如果周围环境中没有相应的远点,基于可见度的范围图像方法就不能去除移动点。另一个问题是,当移动物体完全挡住我们传感器的视场时,该方法就不适用。
评价
与LOAM和LIO-SAM相比,所提出的RF-LIO的绝对轨迹精度可分别提高90%和70%。RF-LIO是高动态环境下最先进的SLAM系统之一。
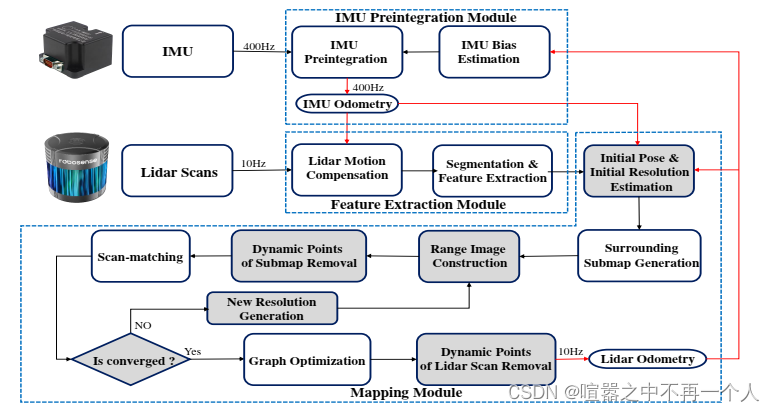
论文框架
RF-LIO的总体框架。IMU预集成模块用于推断系统运动并生成IMU里程表。特征提取模块补偿点云的运动失真,并通过评估点的粗糙度提取特征点。地图模块输出精炼的姿态估计和全局3D映地图,并从点云图中删除移动物体。














 970
970











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









