







论文信息
题目:
Robust Method for Removing Dynamic Objects from Point Clouds
从点云中去除动态物体的稳健方法
论文地址:
https://www.researchgate.net/profile/Divya-Agarwal-4/publication/346918112_Robust_Method_for_Removing_Dynamic_Objects_from_Point_Clouds/links/61f0ca39dafcdb25fd502b00/Robust-Method-for-Removing-Dynamic-Objects-from-Point-Clouds.pdf
发表期刊:
2020 IEEE International Conference on Robotics and Automation (ICRA)
标签
动态目标检测、点云过滤、体素地图
摘要
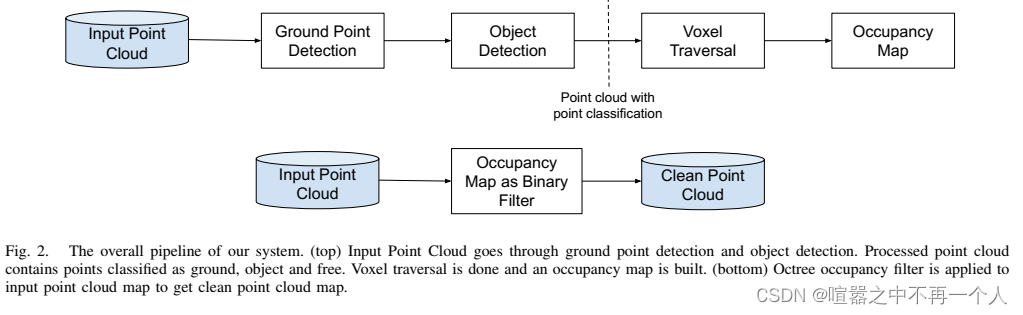
三维点云图是在不同位置和时间获得的激光扫描图的累积。由于激光扫描图代表了捕获时周围环境的快照,它们通常包含移动的物体,这些物体可能不会在所有时间被观察到。点云图中的动态物体会降低地图的质量,影响定位精度,因此从三维点云图中去除动态物体非常重要。 给定一组注册的三维点云,我们建立一个占用图,其中的体素代表了空间体积在一个较长时期内的占用状态。在建立占用图后,我们将其作为过滤器,在将点添加到地图中之前去除激光雷达扫描中的动态点。 此外,我们利用物体检测和一种新的体素遍历方法来加速建立占位图的过程。一旦占位图建立起来,动态物体移除就可以实时运行。我们的方法在有停止或移动的交通的宽阔城市道路上运行良好,随着同一场景中更多激光雷达扫描的加入,占位图会变得更好。
我们提出了一种新的占用概率更新策略,通过考虑体素的占用历史来建立持久的占用图。与我们的方法不同,倾向于快速更新体素的占用分数,倾向于最新看到的占用状态。
我们提供了一种可选的方法,通过使用对象检测方法对对象点进行分类来加速占用图的构建过程,以及使用这些点来更新占用图的策略。
此外,我们还提供了一种独特的方法来生成人工端点,用于更新体素的闭塞分数.本文提出的动态物体移除方法是基于神经网络模型和占用图的混合方法。
内容简介
在本文中,我们提出了一种新的、稳健的方法来去除点云图中的动态物体。我们使用占用率八叉图来创建干净的点云。占用率八叉图在Octomap中的实现存在局限性,它不能用于大规模的户外地图。 在我们的案例中,最大八叉树深度为16,体素大小为0.3米,它只能覆盖(216 ∗0:3)3米的区域,也就是7599.82立方公里的体积。
评价
我们实验的目的是要证明我们的动态对象点去除方法比仅仅使用对象检测的动态对象点去除方法要好。














 2909
2909











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









