







论文信息
题目:
LRD-SLAM:A Lightweight Robust Dynamic SLAM Method by Semantic Segmentation Network
LRD-SLAM:一种基于语义分割网络的轻量级鲁棒动态SLAM方法
论文地址:
https://www.hindawi.com/journals/wcmc/2022/7332390/
发表期刊:
Wireless Communications and Mobile Computing/ 2022/ Article
标签
语义分割、改进ORBslam2、FNeT神经网络
摘要
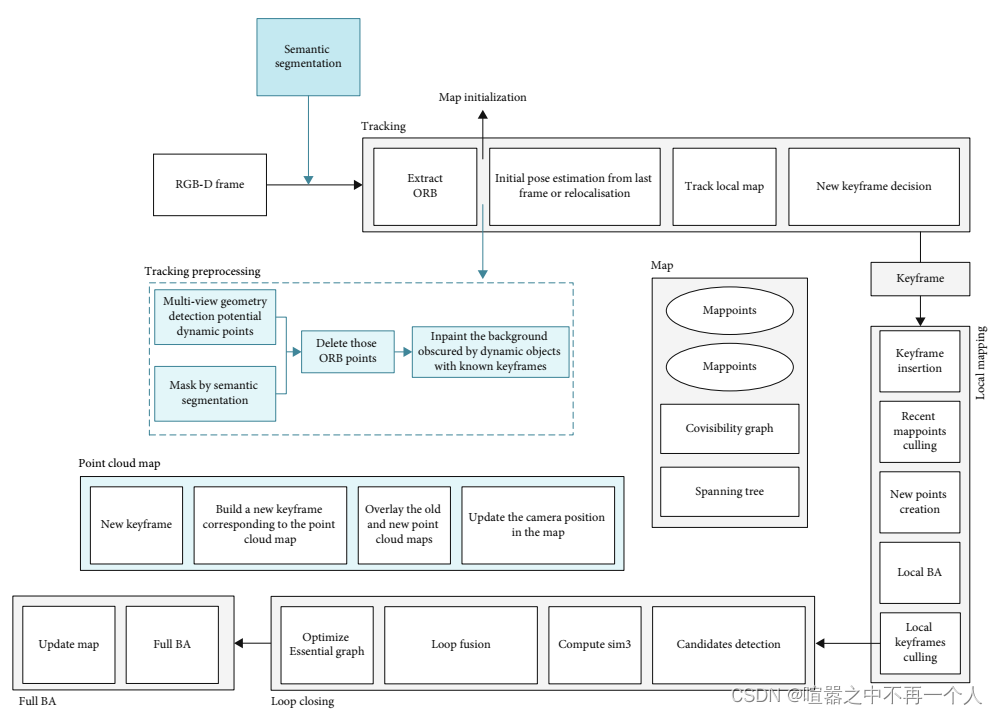
提出了一种基于新型语义分割网络的轻量级鲁棒动态SLAM系统(LRD-SLAM)。在ORB-SLAM2中实现了一个快速深度卷积神经网络(FNet)作为语义分割线程。此外,引入多视角几何方法,通过视差角度和深度的差异进一步提高动态点检测的精度,并利用关键帧的信息修复移除动态物体时缺失的静态背景信息,以方便后续的点云图重建。
提出一种适用于室内行人动态环境的视觉SLAM算法。所提系统采用一种新的轻量级卷积神经网络进行语义分割。此外,在跟踪线程中引入跟踪预处理阶段,消除图像中的动态部分并修复背景。然后,将可靠的ORB特征点输入到后续线程;最后生成稠密点云图。我们的主要贡献总结如下。
首先,提出一种适用于室内动态环境的轻量级鲁棒动态SLAM (lightweight robust dynamic SLAM, LRD-SLAM)算法。LRD-SLAM主要在提高实时性的同时保证了动态环境下的定位精度,工作时具有较强的鲁棒性。其次,提出了一种快速的深度卷积神经网络(FNet)用于语义分割。该卷积神经网络被用作语义线程,能够快速准确地识别给定场景中行人的信息。分割目标可以用二进制掩码覆盖。第三,提出了一种新的动态对象裁剪策略算法。该算法采用基于视差角度和深度值的多视角几何方法判断目标是否为潜在动态物体;然后结合语义分割检测到的动态对象,通过动态对象剔除策略对动态对象进行处理;本文的其余部分组织如下。第二部分综述了三种动态环境下的视觉SLAM方法。第三节介绍了IRD-SLAM的基本框架,一种新的用于语义分割的深度卷积神经网络的原理,以及跟踪的预处理阶段。
内容简介
一种适用于动态环境的轻量级视觉SLAM系统。设计FNet并将其集成到提出的视觉SLAM系统中。该系统将FNet检测到的动态目标与多视角几何方法相结合,去除动态目标的特征点,恢复因动态点的去除而丢失的静态背景。使用TUM RGB-D数据集进行的实验表明,在室内动态环境下,LRD-SLAM显著优于ORB-SLAM2,并且获得了比现有最先进的动态环境视觉SLAM系统更高的精度。并将FNet与现有先进的深度卷积神经网络的模型参数进行了比较。实验结果表明,LRD-SLAM是轻量级的,可以在移动设备上运行















 2238
2238











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









