







安装后配置
sudo apt update
sudo apt upgrade1. ROS安装步骤
1.1. 添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
1.2. 添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
1.3. 更新依赖
sudo apt update
1.4. 安装桌面完整版ROS
sudo apt install ros-noetic-desktop-full

1.5. 设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
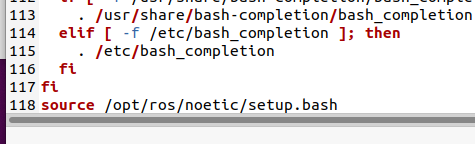
在lunix中,先需要source一下bash文件来运行脚本。
在这里,我们需要运行这个bash文件才能让系统加载ros,所以需要运行source /opt/ros/noetic/setup.bash来加载ros。
但是每次加载很麻烦,所以配置一个环境变量,让终端每次启动都能加载这个bash,如何实现呢?在用户根目录下,有个隐藏文件:.bashrc。
打开用户根目录,按Ctrl+H可显示隐藏文件,就可以打开.bashrc了。
2. 启动ROS
2.1. 在终端输入roscore启动ROS Master
再打开一个终端窗口,启动小海龟仿真器:
rosrun turtlesim turtlesim_node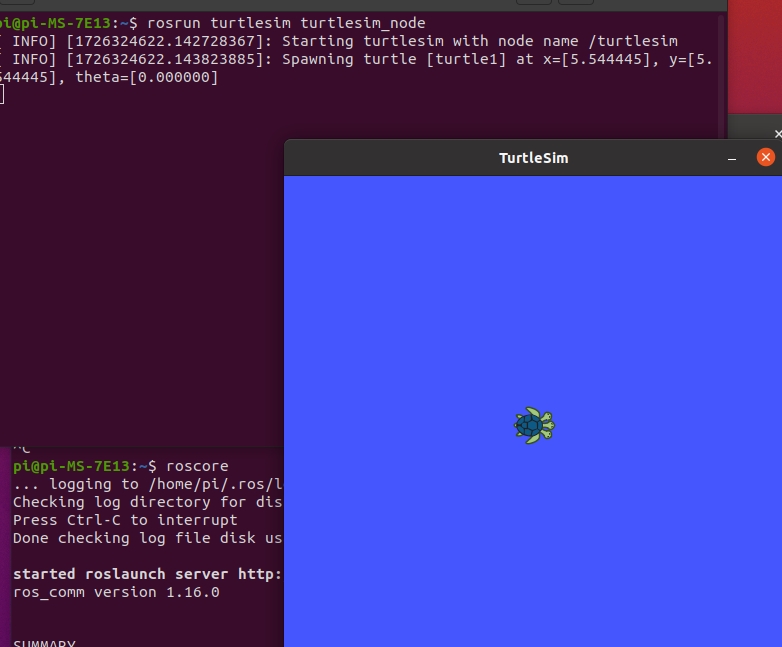
参考文章:【ROS学习笔记】2.ROS安装、关于ubuntu的环境变量_修改python环境变量到ros ubuntu-CSDN博客















 5085
5085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









