







 本文档详细介绍了如何构建一个自动紧急制动(AEB)系统。首先,设置了车辆在检测到与前方车辆距离小于40米时发出警告,35米时进行轻度制动,15米时执行紧急制动的逻辑。接着,新建工况、设定3D路面、配置前方车辆参数和传感器,然后在Simulink中搭建AEB算法模型,并定义输入输出接口。最后,通过图像展示系统效果并调整图像设置。这是一个自学AEB系统的实用指南。
本文档详细介绍了如何构建一个自动紧急制动(AEB)系统。首先,设置了车辆在检测到与前方车辆距离小于40米时发出警告,35米时进行轻度制动,15米时执行紧急制动的逻辑。接着,新建工况、设定3D路面、配置前方车辆参数和传感器,然后在Simulink中搭建AEB算法模型,并定义输入输出接口。最后,通过图像展示系统效果并调整图像设置。这是一个自学AEB系统的实用指南。
说明:自己在学习时没人指导,希望能给学习AEB的学生提供一些借鉴,以及方便自己回顾知识。
功能:控制算法逻辑车辆采集到传感器信号距离前方车辆位移距离本车40发出警告当距离达到35车辆进行小制动3MPa当距离为15时车辆紧急制动,制动压力为10MPa。
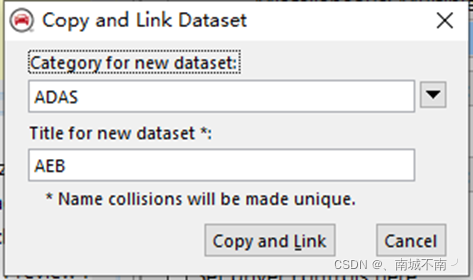
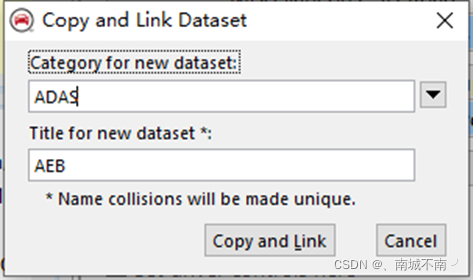
- 新建——复制。
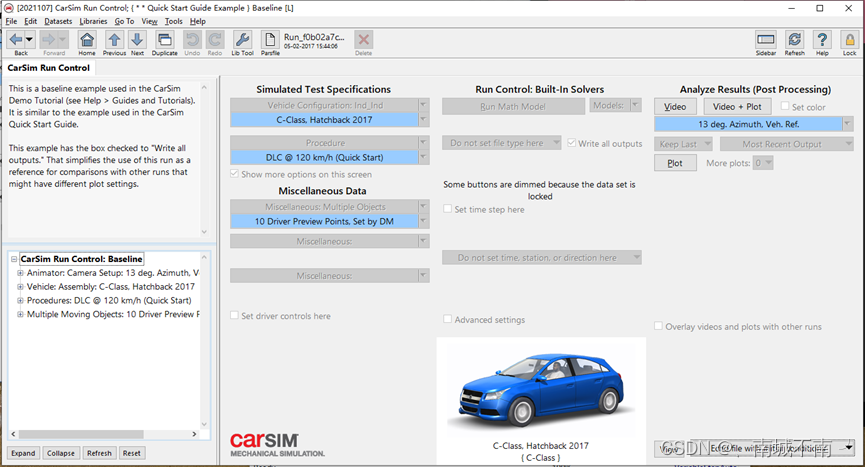

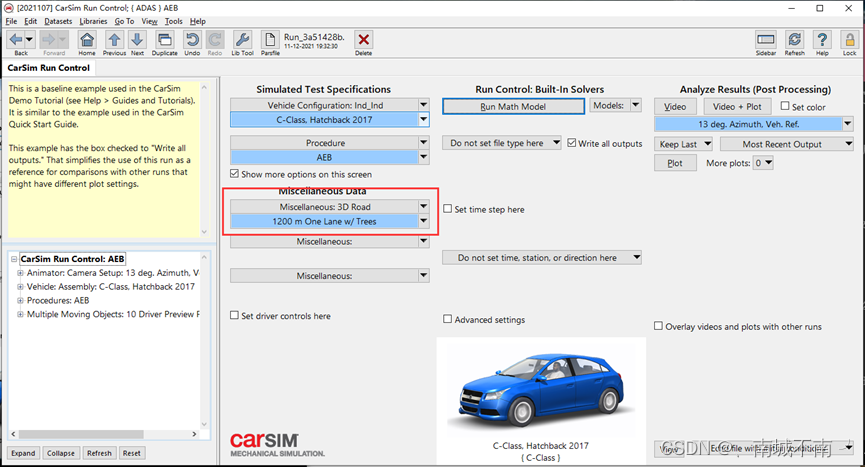
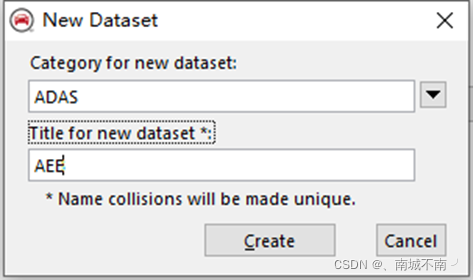
2、新建工况。
3、设置3D路面。
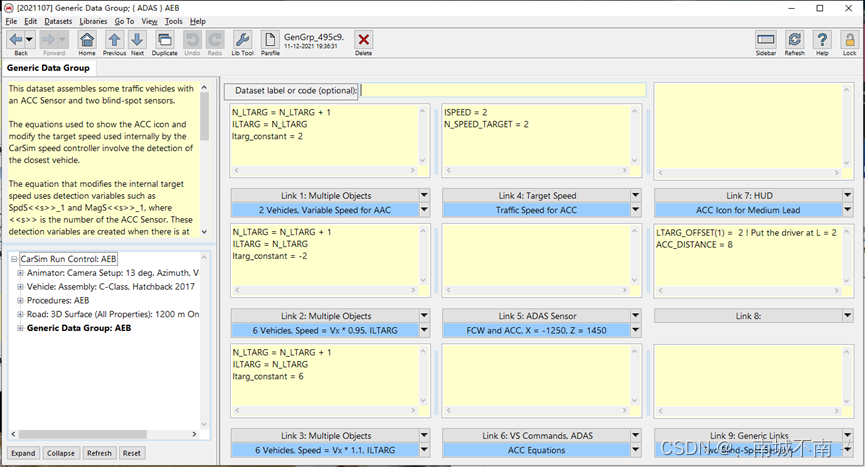
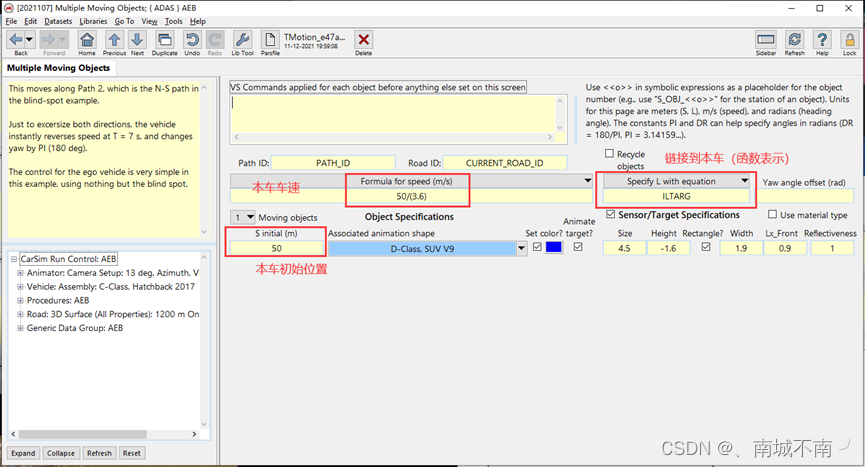
4、前方车辆。
复制
5、设置前方车辆参数。删除其他,只保留第一个窗口内容——更改。
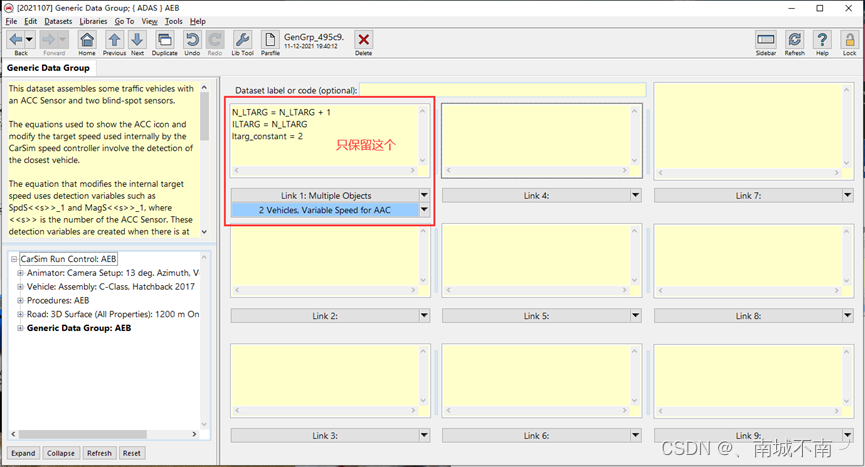
复制

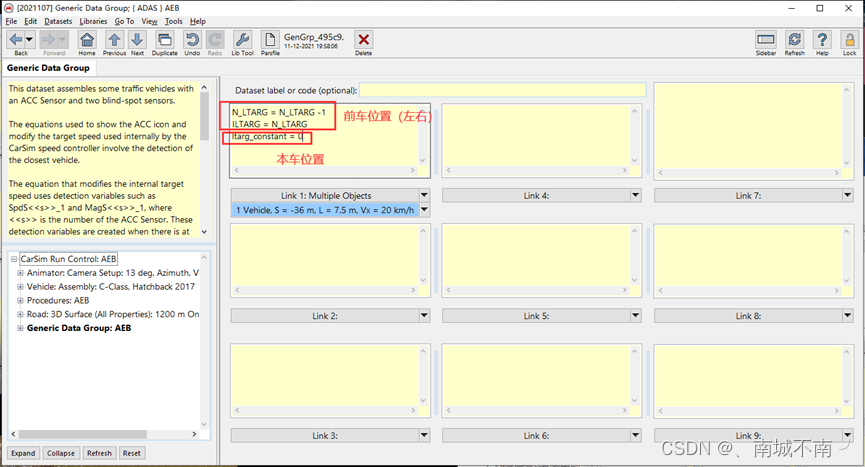
 更改参数
更改参数
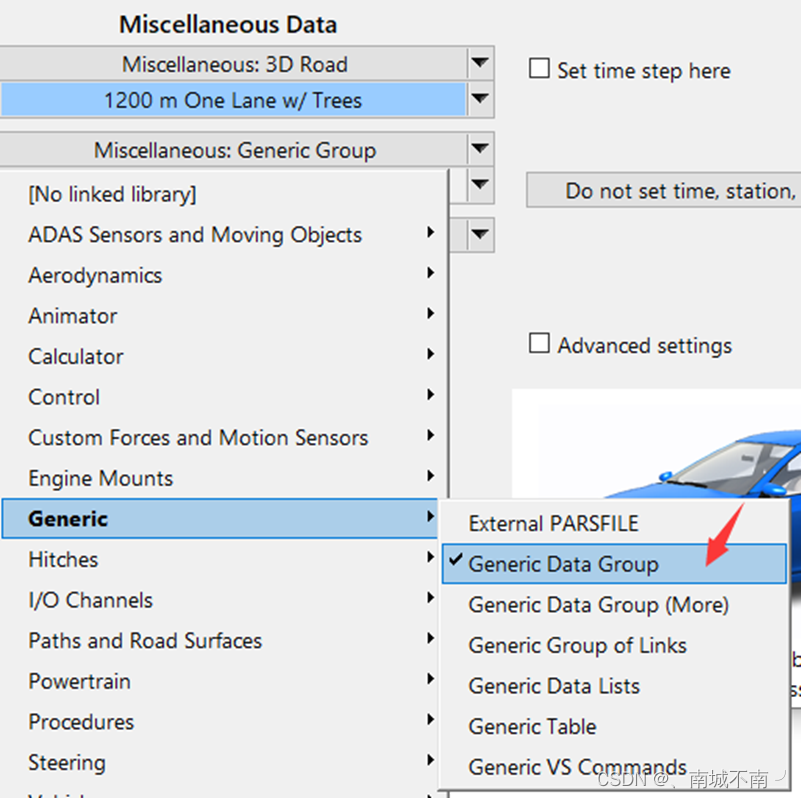
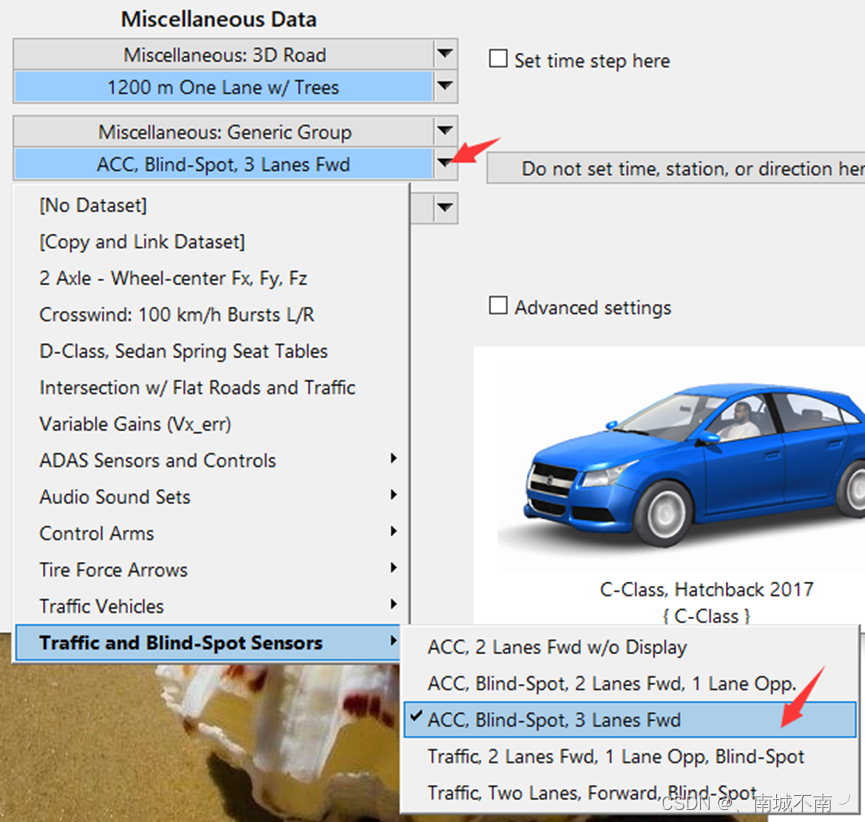
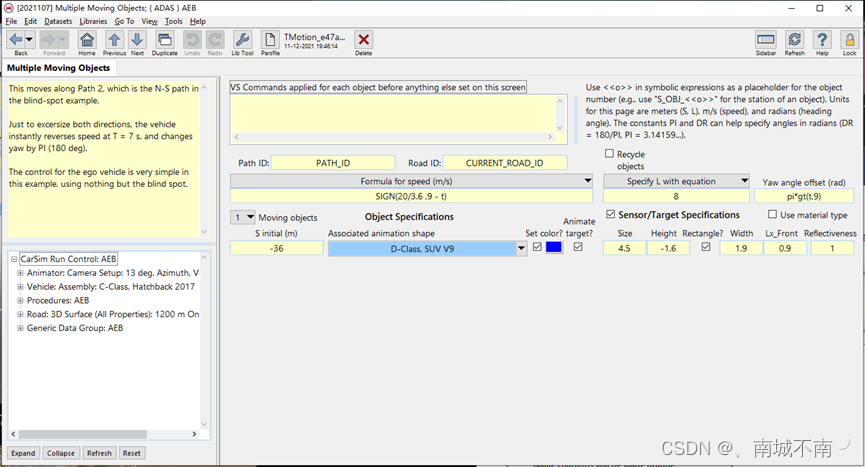
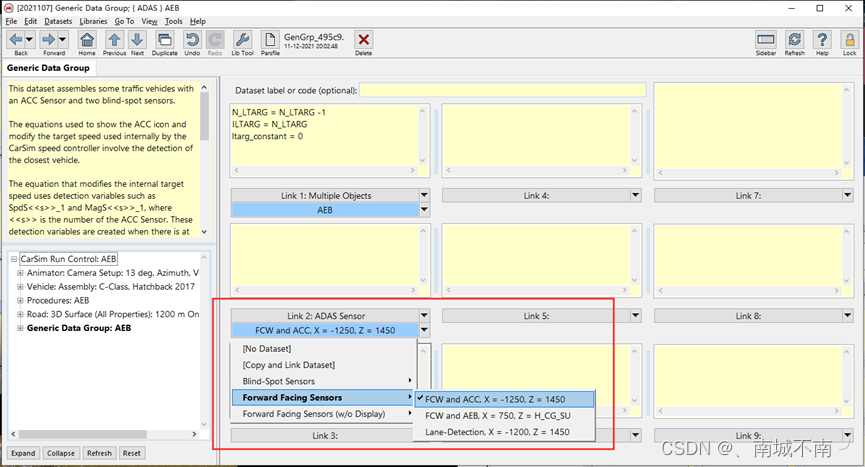
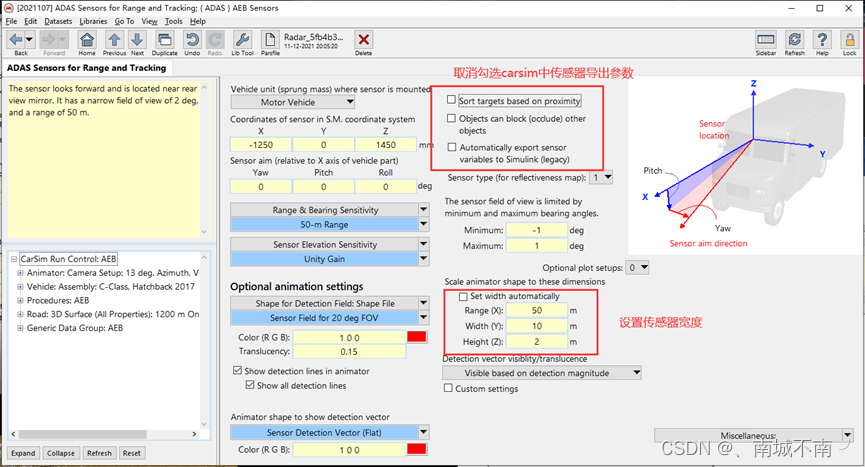
6、定义传感器。
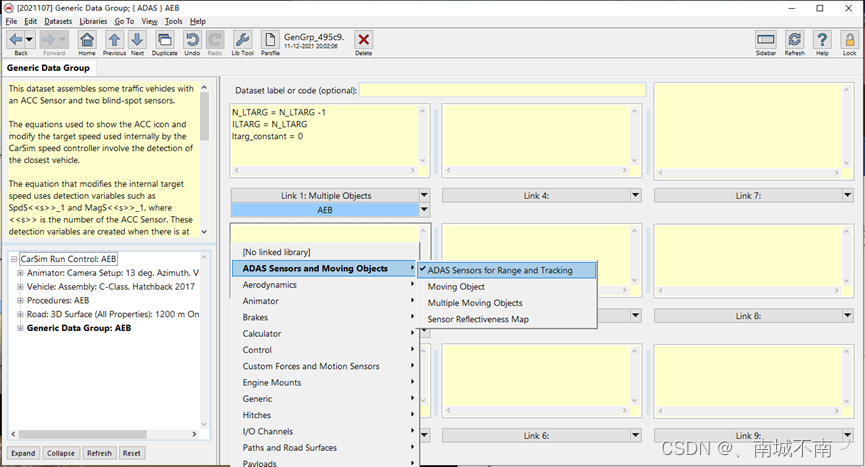
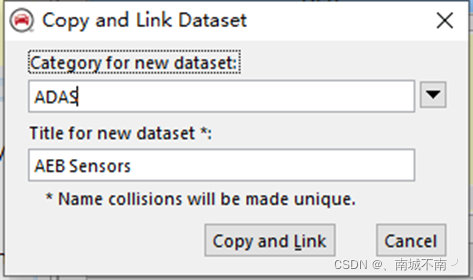
复制
修改传感器宽度。
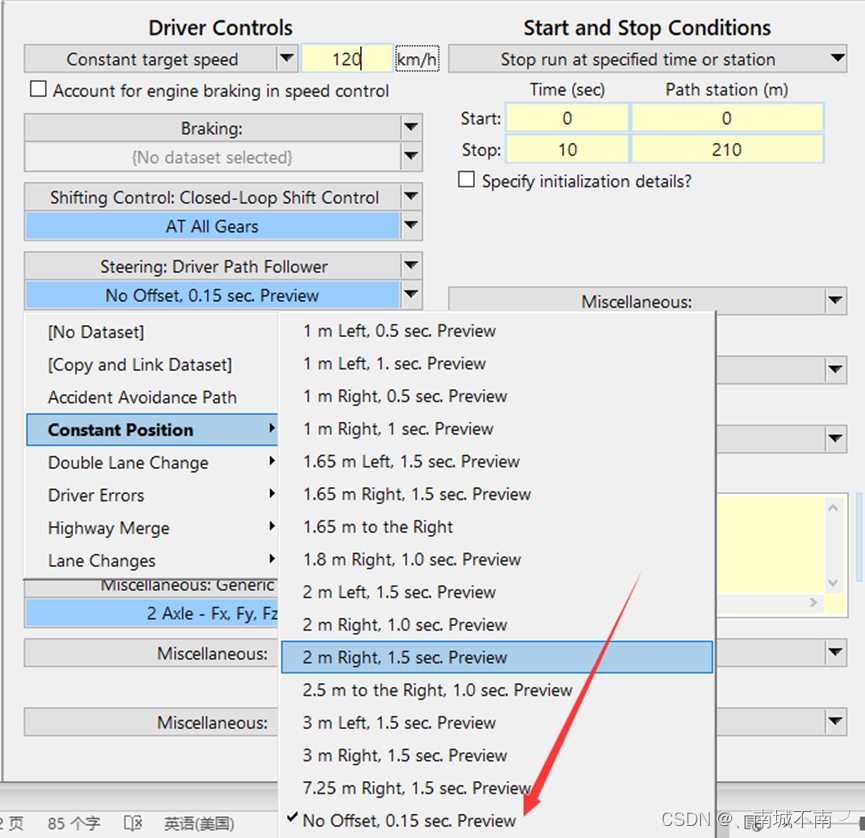
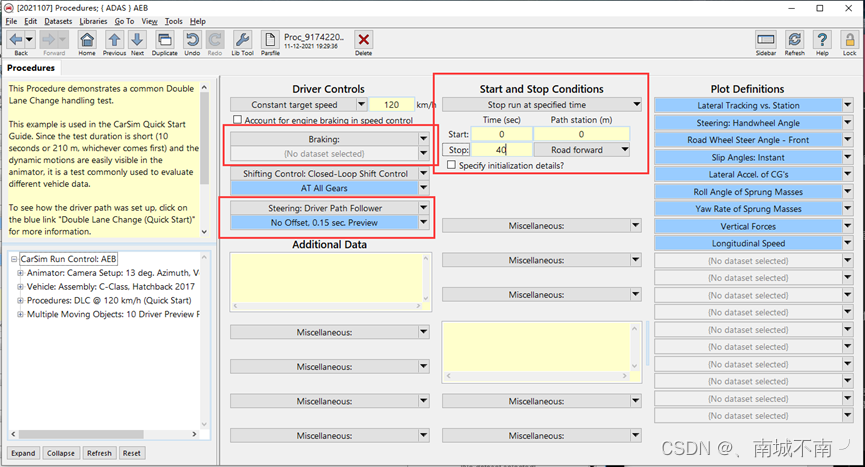
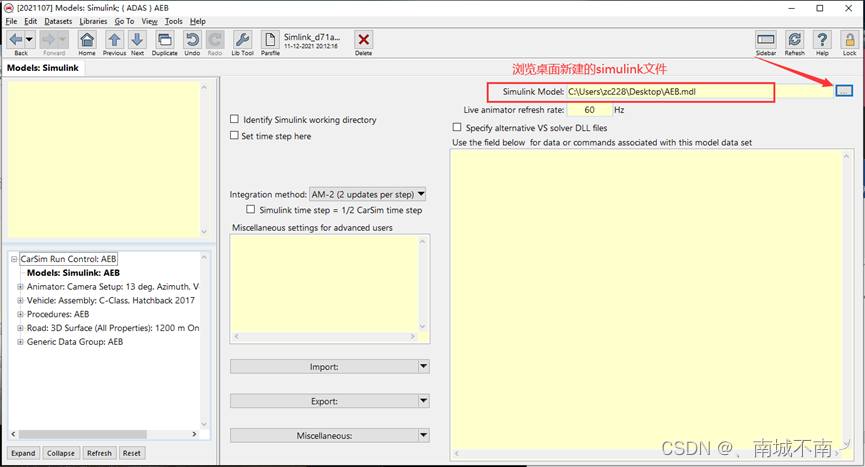
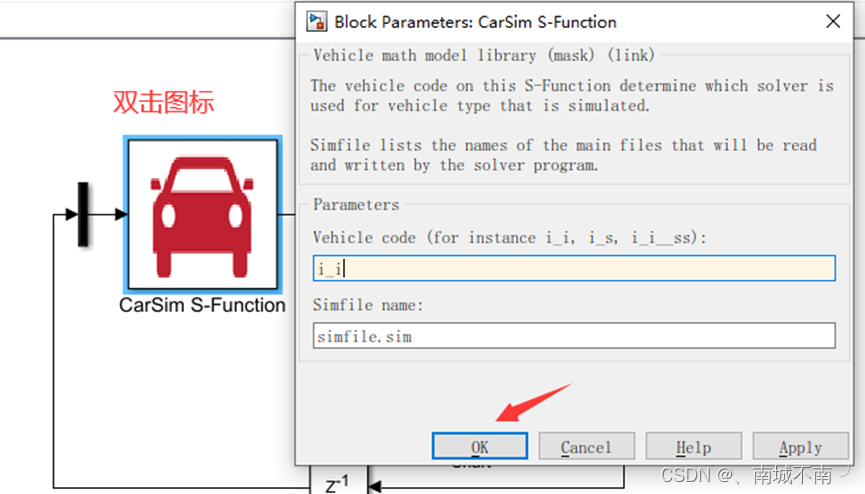
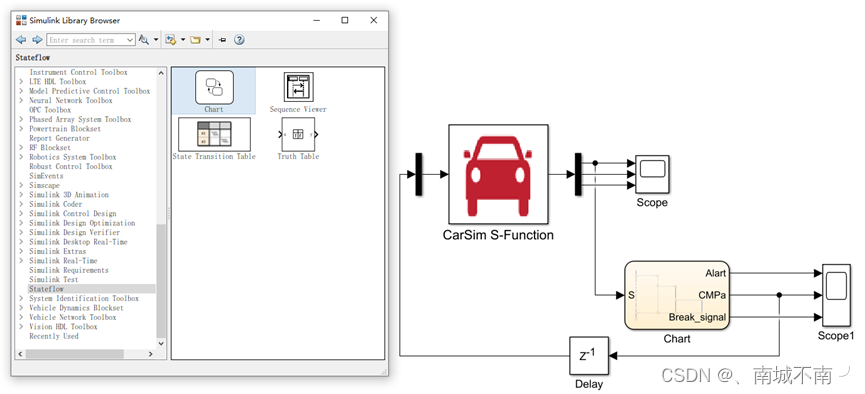
7、设置simulink接口。
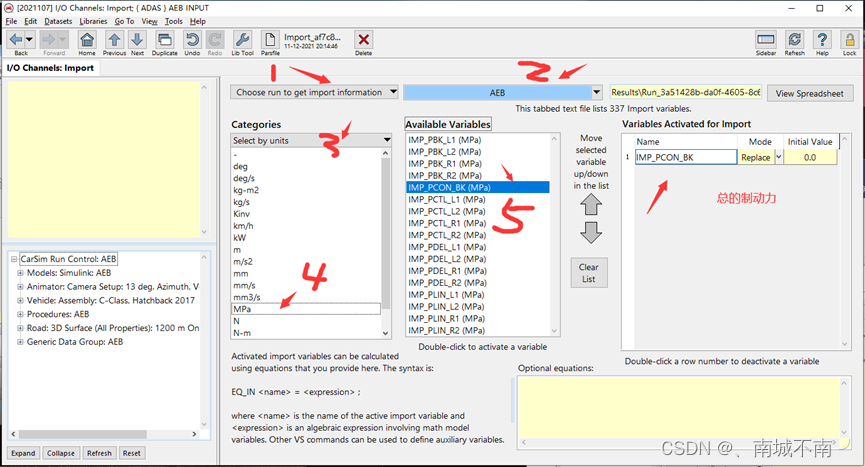
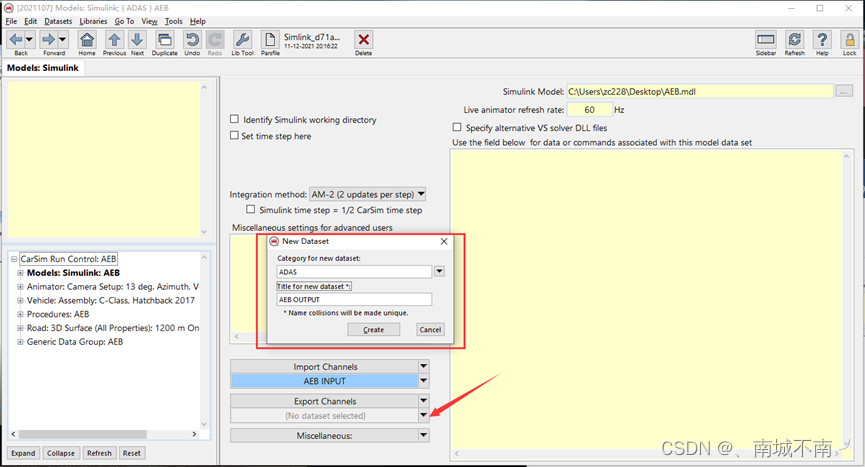
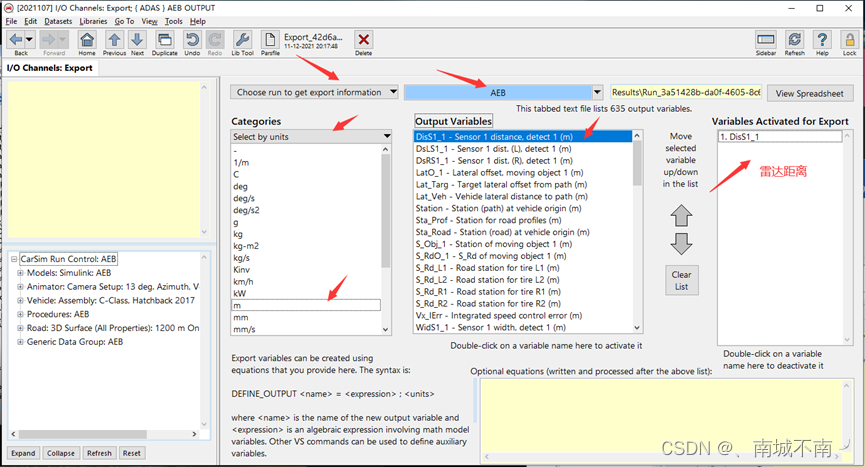
8、设置输入输出接口。
电脑桌面新建一个空的simulink文件,命名“AEB”,置于桌面备用。

AEB INPUT

 AEB OUTPUT
AEB OUTPUT
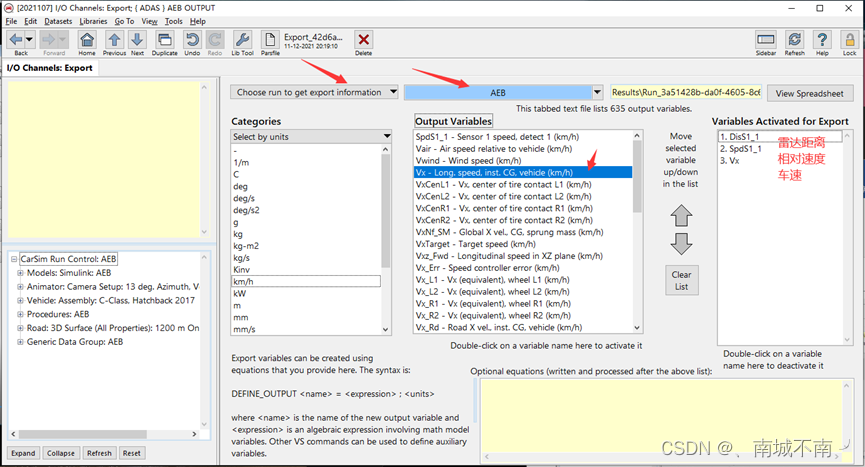
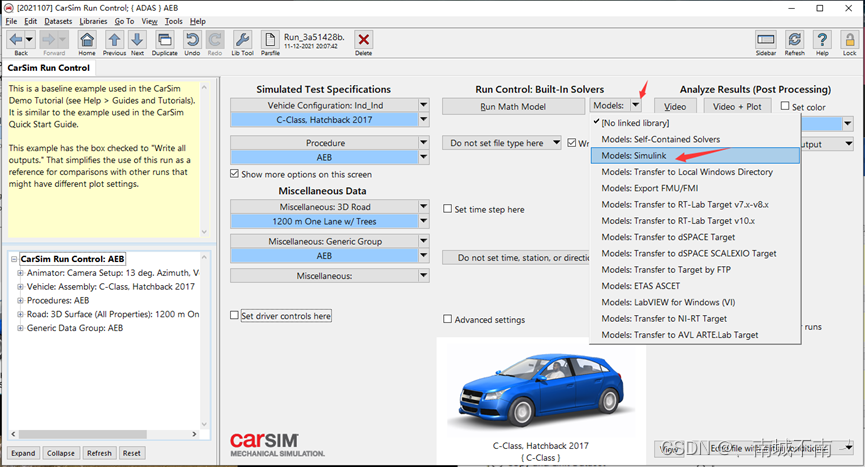
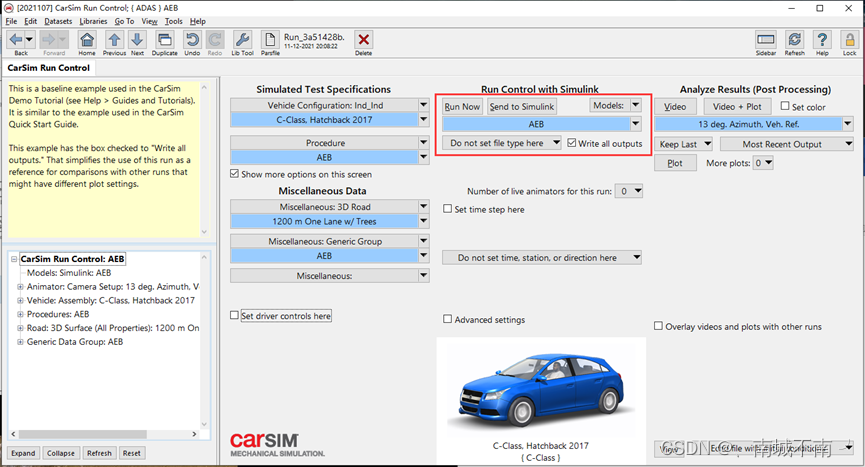
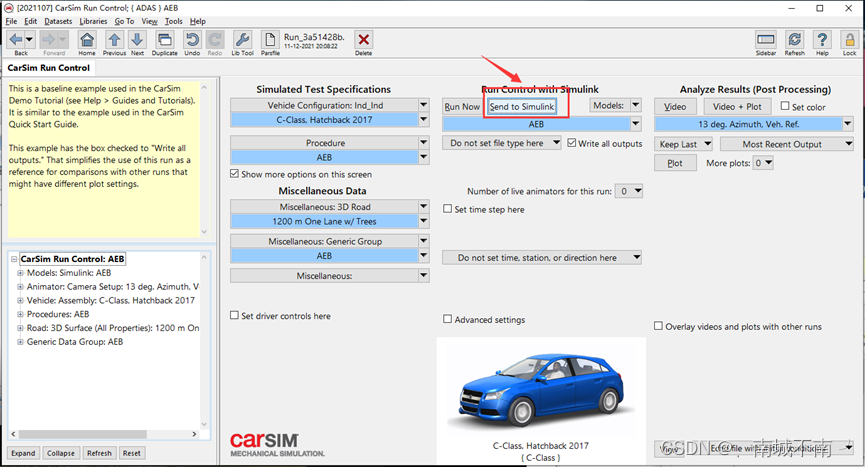
9、发送到simulink。
10、AEB算法搭建。
(算法可跳过)(或者参考一些论文,自己搭建算法)
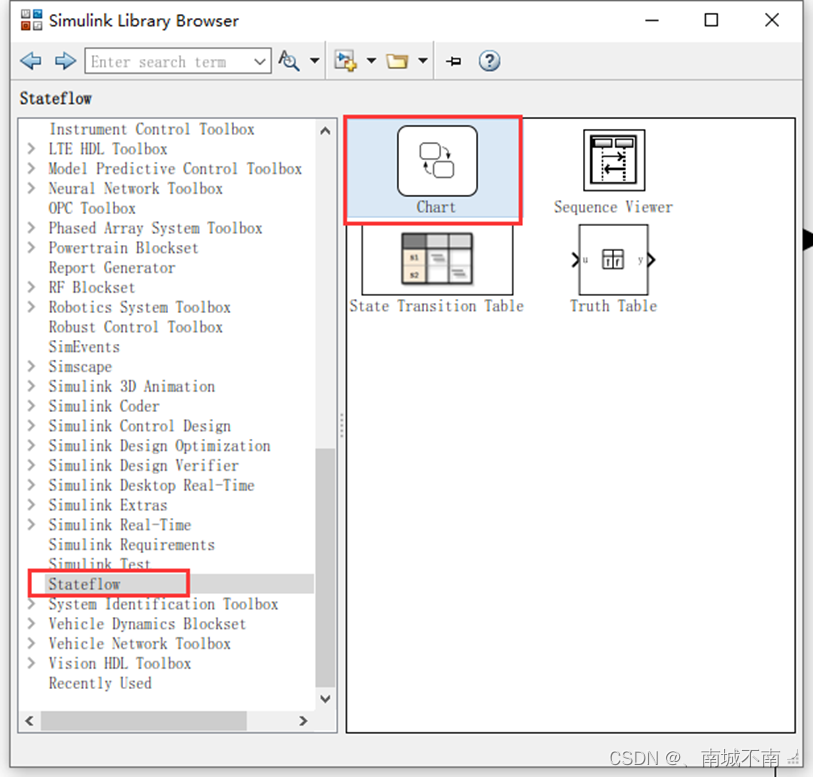
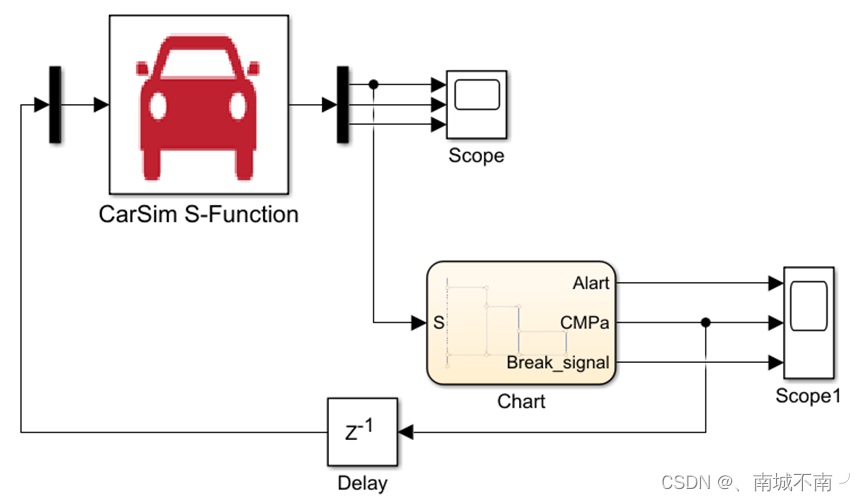
算法,可以自己修改,或者参考论文AEB算法搭建。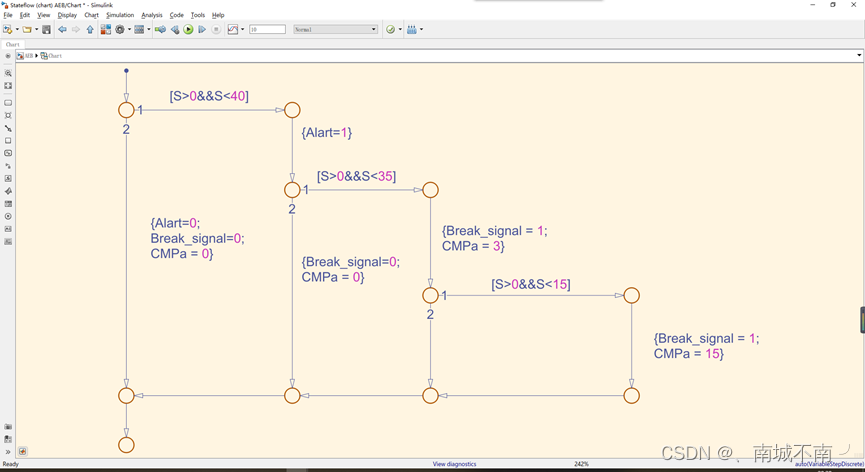
控制算法逻辑车辆采集到传感器信号距离前方车辆位移距离本车40发出警告当距离达到35车辆进行小制动3MPa当距离为15时车辆紧急制动,制动压力为10MPa。
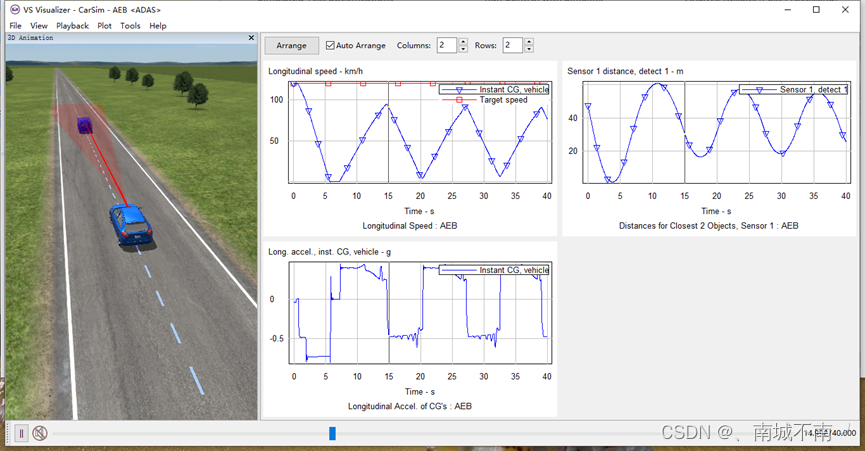
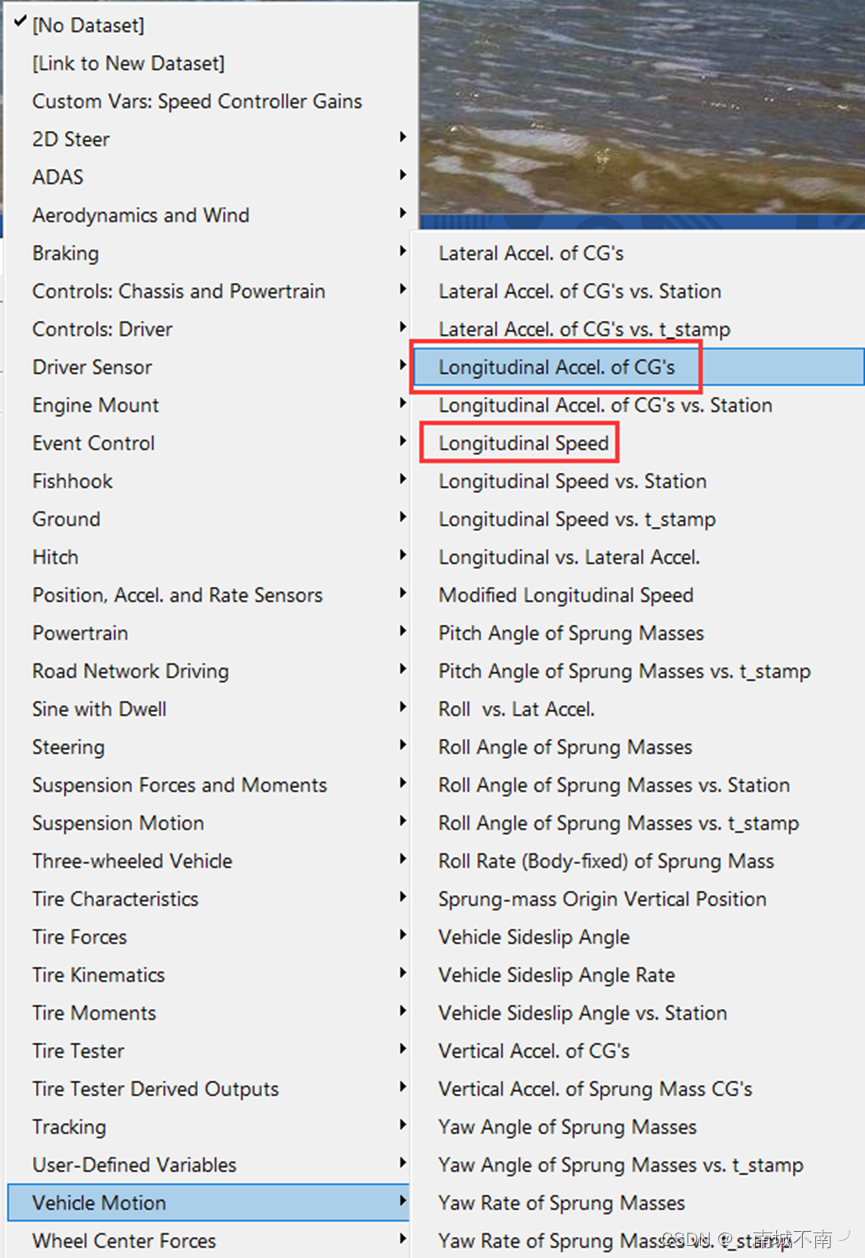
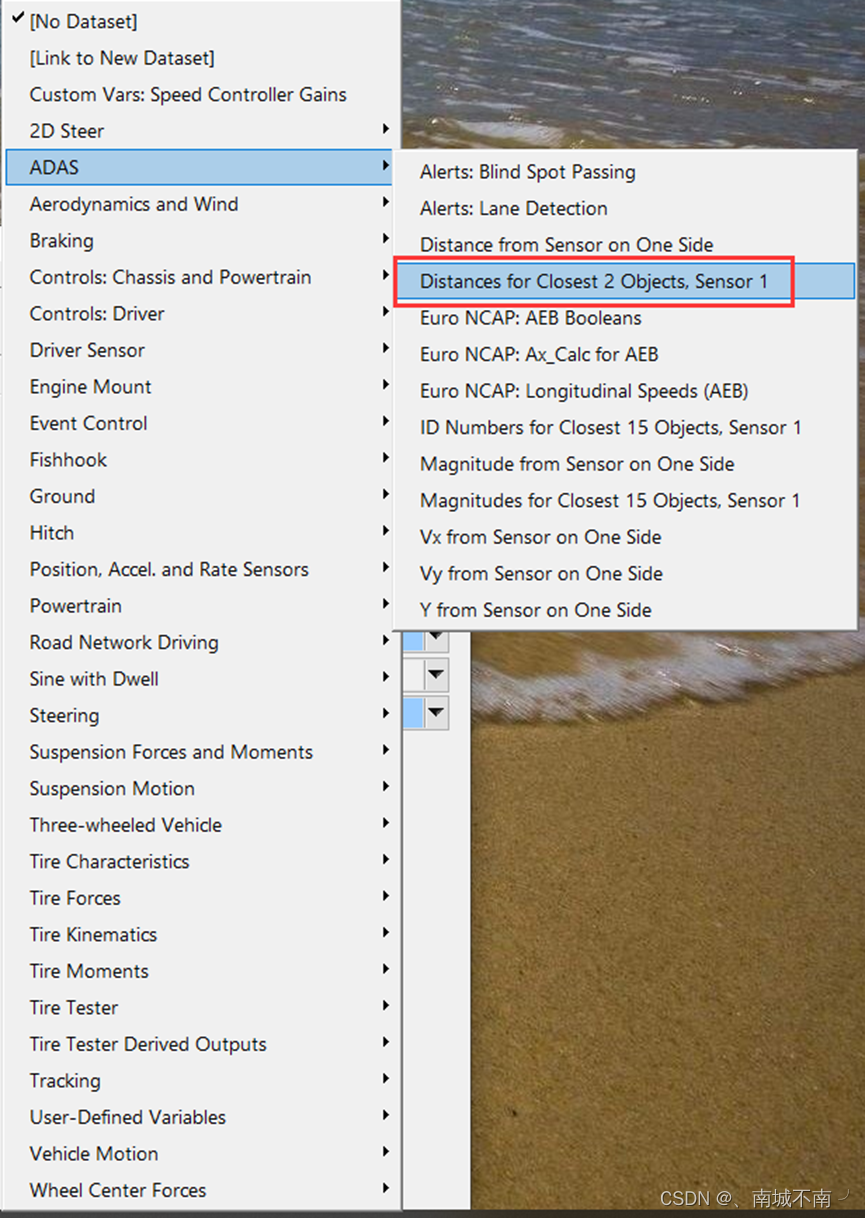
11、输出图像:
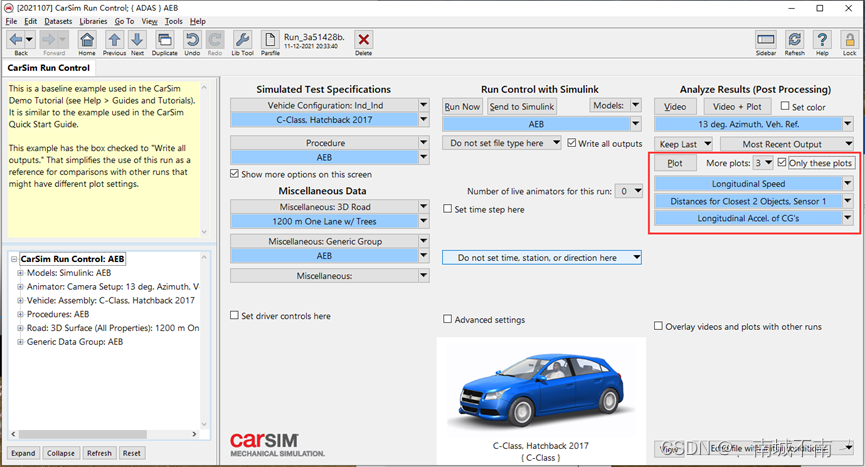
12、最终效果。
附录(图像设置)

















 2718
2718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









