






三、路径规划算法
(⼀)路径规划算法总体介绍
⾸先进⾏路径规划,然后进⾏速度规划
|
|

路径规划主要对于静态障碍物,速度规划主要针对动态障碍物配置⽂件中,DECIDER都是决策器,OPTIMIZER都是优化器下⾯具体讲路径规划task做什么
⾸先是四种决策
(1)Task: LANE_CHANGE DECIDER

如果有⼀条参考线就不换道,如果多条就判断需不需要换道所有条件满⾜会产⽣换道决策
(2)
|
|

路径规划中,每⼀帧都规划,如果感知识别出来的障碍物bounding box不稳定,每⼀帧也会随着bounding box的改变⽽上下跳动,带来的问题就是⾏驶中的不稳定,路径根据障碍物上下跳动
所以Apollo引⼊路径重⽤决策,如果上⼀帧路径没和障碍物发⽣碰撞,这⼀帧路径直接复⽤上⼀帧路径,不会再进⾏接下来的路径规划,直接跳到速度规划的部分。
如果上⼀帧的路径和障碍物存在碰撞,就继续进⾏后⾯的路径规划
(3)
主要处理⾃⻋道前⽅有没有⼀个阻挡⾃⾝的障碍物

决策也是⼀些判断条件:
如果只有⼀条⻋道,就没法借道, 如果其他⻋道有障碍物,
如果障碍物距离路⼝⽐较近,也不借道。
障碍物是够⻓期存在。旁边⻋道是实线还是虚线。条件满⾜后会产⽣向左或者向右的决策。
(4)
|
|
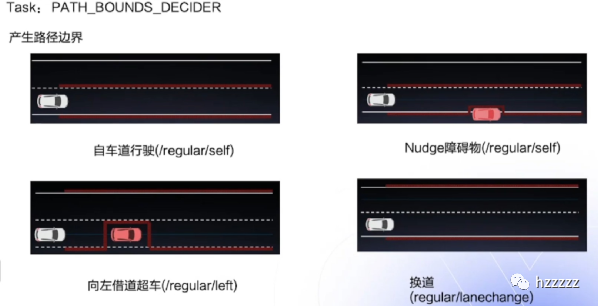
SL坐标系内,确定路径可以⾛的边界范围,使⽤前⼏个决策器产⽣候选边界:
如果只是⾃⻋道⾏驶,就按照⾃⻋道边界
如果是Nudge障碍物,(Nudge障碍物指的是前⽅障碍物没有完全阻挡住⾃⾝⻋道的障碍物),我们会采⽤障碍物的边界以及⾃⻋道边界
向左借道超⻋,边界采⽤被超⻋的边界和换道的边界组成换道决策,采⽤当前⻋道和换道的边界组成
(5)
最后是⼀个优化算法
|
|

规划出⼀条平滑路径
(6)Task: PATH ASSESSMENT_DECIDER
路径规划后,产⽣多条路径,再对你每条路径进⾏打分

⽐如向左向右和当前⻋道的路径,最后进⾏评价,基于规则,选出最优路径从上到下按照规则选择
()
|
|

根据路径对障碍物赋予决策,⽐如最后是向左绕⾏的路径,会对绕⾏障碍物进⾏决策,就产⽣⼀个停⽌的决策,这个决策主要是对速度规划使⽤
(⼆)基于⼆次规划的路径规划算法
⼆次规划标准型

求解⼆次型的,线性约束的优化问题
P是⼆次项系数,P是⼀个正定矩阵,为什么是正定矩阵呢?
答:正定矩阵保证了x^TPx⼤于等于0,这样才会有⼀个极⼩值点
q是⼀次项系数,是⼀个n维实数向量A是约束函数的⼀次项系数,
l和u是m维向量,上边界和下边界
常⽤开源的求解器:OSQP,qpOASES OSQP使⽤ADMM求解,Apollo主要采取OSQP
⼆次规划流程

定义优化变量
⾸先需要把障碍物投影到参考线上
先把障碍物投影到参考线,然后再以delta s进⾏离散成s0到sn-1

选择纵向的l作为优化的变量
此外还需要选取l的⼀阶导dl和⼆阶导ddl作为优化变量

|
|
⽬标函数设计
根据实际需求来设计⽬标函数:安全性,舒适性,以及接近终点
|
|

w为惩罚项
三阶导可以使⽤相邻两个⼆阶导求得
|
|

|
|
然后写成矩阵形式
|
|

然后说⼀下约束设计
(1)主⻋必须在道路边界内
|
|

|
|
bound由之前task确定的
(2)运动学限制
|
|

对于曲率的公式做⼀些假设,
|
|

|
|
得到ddl的约束
此外还需要满⾜曲率变化率的要求,也就是规划出的路径, 能让⽅向盘最⼤打的过来
|
|

假设在路径上是匀速的,带⼊三阶导公式
|
|

|
|
得到了三阶导边界约束总结:

|
|
此外要满⾜基本物理原理
|
|

也就是三阶导恒定,⼆阶三阶导连续转化为约束矩阵
第⼀部分l约束,然后dl的约束,以及ddl约束,然后是连续性约束最后是起点硬性约束
|
|

然后是带⼊OSQP进⾏求解
OSQP是⼀种求解QP问题的数值优化开源软件求解分为四步

设置求解器参数,这⾥都是⽤的默认参数

|
|
然后是计算QP系数矩阵

CalculateKernel是计算⼆次型系数P矩阵, AffineCons是A矩阵,Offset是q向量

|
|
算完之后调⽤setuo函数去求解
|
|

|
|
获取优化值

|
|
(三)路径规划算法执⾏流程

|
|
⾸先获取参考线平滑结果,然后⽣成⼀系列任务每⼀个决策都是⼀个Process
|
|

|
|
输⼊的为参考线info,frame(这⼀帧的总的数据结构)
|
|

⾸先是换道决策
|
|

|
|
结果保存在injector中,是⼀个单例类,保存的变量会贯穿始终,因为好⼏帧都要依靠它来
然后是借道决策

|
|
判断结果使⽤truefalse来保存,向左向右保存在injector中
|
|

|
|
第三步是路径边界产⽣

|
|
|
|

最后把它保存在参考线info内
|
|

最后进⾏路径⽣成,调⽤优化器

每条路径保存在候选路径内最后进⾏路径结果⽐较
路径规划算法实践
|
|
















 4322
4322











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









