







论文标题:Spatial-RAG: Spatial Retrieval Augmented Generation for Real-World Spatial Reasoning Questions
作者:Dazhou Yu,Riyang Bao,Gengchen Mai...
来源:arXiv
DOI:10.48550/arXiv.2502.18470
email:yuhan.huang@whu.edu.cn
创作不易,恳请大家点赞收藏支持:)
(不好意思,这里偷了个懒,公式太复杂,一个一个打时间来不及,我就没太管,感兴趣的uu可以自己去看下原文 😀)
引言
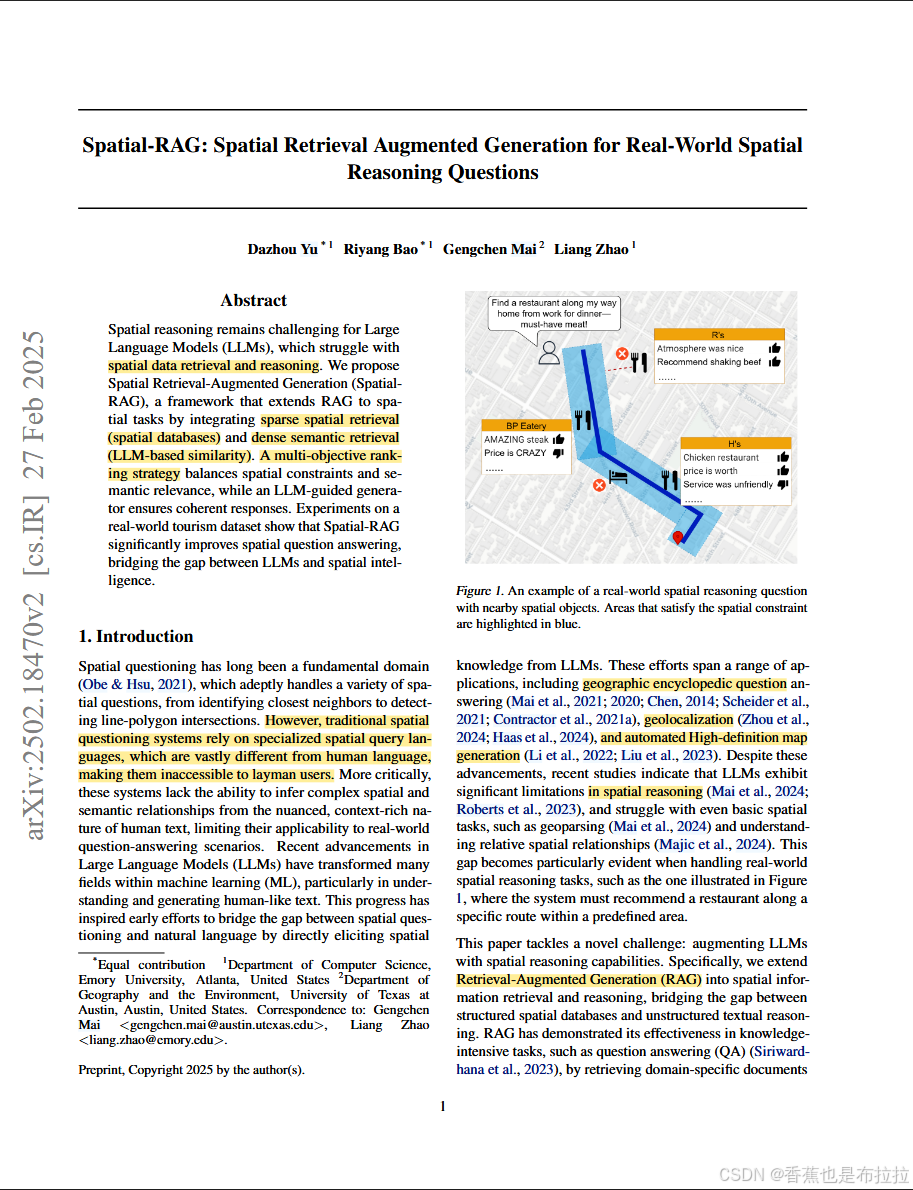
近年来,大语言模型(LLMs)在自然语言处理领域的表现令人瞩目。从简单的文本生成到复杂的对话系统,LLMs 的能力已被广泛应用于各类任务。然而,当涉及到空间推理任务时,LLMs 的能力却显得不足。空间推理任务需要模型能够理解和处理空间数据,包括几何形状、空间关系以及语义约束,这些任务广泛存在于地理推荐、路径规划、导航、城市规划等实际应用场景中。
传统的空间推理系统依赖于空间数据库和专业的查询语言(如 SQL 或 PostGIS),这些系统虽然能够高效处理结构化的空间数据,但与自然语言交互的能力有限。而 LLMs 虽然擅长自然语言理解,但缺乏对空间数据的深刻理解,尤其是在处理复杂的几何约束和空间关系时表现不佳。
本文解读的论文《Spatial-RAG: Spatial Retrieval Augmented Generation for Real-World Spatial Reasoning Questions》提出了一种创新性的框架——Spatial-RAG,将 LLMs 的自然语言生成能力与结构化的空间数据处理能力相结合,弥合了两者的差距。Spatial-RAG 提供了一种通用方法,用于处理复杂的空间推理任务,从而显著提升了 LLMs 在真实世界场景中的表现。
1. 背景与问题定义
1.1 空间推理的挑战
空间推理任务的复杂性主要体现在以下几个方面:
-
空间数据的结构化特性:
- 空间数据通常以几何形状(如点、线、多边形)存储在空间数据库中,需要通过专业的 SQL 查询语言进行检索。
- 用户可能希望在特定区域内找到满足条件的目标(如“寻找离我最近的餐厅”),这需要模型能够理解并处理几何约束。
-
自然语言的非结构化特性:
- 用户的查询通常是自然语言形式,包含模糊或复杂的空间意图。例如,“在从家到公司途中推荐一个可以快速吃午餐的地方”。
- 传统的空间查询系统无法直接解析自然语言,而 LLMs 对几何概念的理解能力有限。
-
空间与语义的结合:
- 空间推理任务不仅需要满足几何上的空间约束,还需要结合语义信息(如餐厅类型、评分等)以满足用户的偏好。例如,“推荐一家评分高于 4.5 的中餐馆”。
1.2 研究目标
针对上述挑战,Spatial-RAG 的目标是构建一个统一的框架,将结构化的空间检索与非结构化的文本生成相结合,具体包括:
- 稀疏检索:通过 SQL 查询从空间数据库中检索满足几何约束的候选答案。
- 密集检索:利用 LLM 的语义匹配能力,筛选出与用户意图最相关的候选答案。
- 多目标优化:动态平衡空间与语义的权重,生成既满足空间约束又符合语义偏好的答案。
2. Spatial-RAG 框架架构
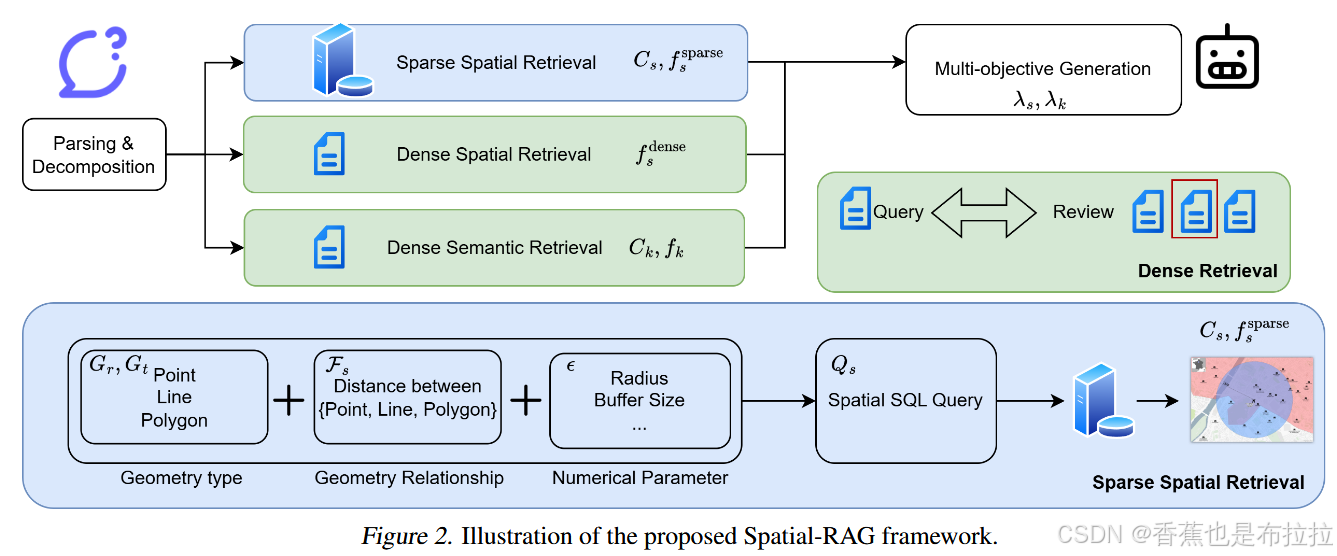
Spatial-RAG 的整体架构由以下三个核心模块组成:
-
稀疏空间检索:
- 从用户问题中提取空间约束,将其解析为 SQL 查询,并从空间数据库中检索满足条件的候选对象。
-
密集语义检索:
- 利用 LLM 提取用户问题的语义特征,与候选对象的文本描述进行语义匹配,计算语义相关性分数。
-
多目标优化生成:
- 通过 Pareto 前沿方法,在空间约束与语义偏好之间进行动态权衡,生成最优答案。
以下是 Spatial-RAG 的整体架构示意图:
3. 核心技术详解
Spatial-RAG 的核心技术包括稀疏空间检索、密集语义检索以及多目标优化生成。以下将逐一详细介绍。
3.1 稀疏空间检索
3.1.1 空间候选集的定义
在空间推理任务中,答案必须满足特定的空间约束。例如,用户可能会询问“离我当前位置 1 公里范围内的餐厅有哪些?”。我们将满足这些约束的候选答案定义为空间候选集 CsCs: Cs(q)={y∣cs(y,q)≤0,∀cs∈Cs(q)}Cs(q)={y∣cs(y,q)≤0,∀cs∈Cs(q)} 其中:
- cs(y,q)cs(y,q) 是空间约束函数,用于编码几何条件(如距离、包含关系)。
- Cs(q)Cs(q) 是问题 qq 的所有空间约束集合。
例如,当问题要求答案在某一位置 lqlq 附近 ϵϵ 范围内时,空间约束函数可表示为: cs(y,q)=d(y,lq)−ϵ≤0cs(y,q)=d(y,lq)−ϵ≤0 其中,d(y,lq)d(y,lq) 表示目标 yy 与参考位置 lqlq 之间的距离。
3.1.2 空间 SQL 查询
为了从空间数据库中检索满足条件的对象,需要将用户问题解析为可执行的 SQL 查询。空间 SQL 查询的形式为: Qs=Fs(Gr,Gt,ϵ)Qs=Fs(Gr,Gt,ϵ)
- FsFs:空间查询函数(如邻近性、交叉性)。
- GrGr:参考对象集合(如用户指定的起始点)。
- GtGt:目标对象集合(如候选餐厅)。
- ϵϵ:查询参数(如缓冲区半径)。
以下是稀疏空间检索的流程图(占位符:请替换为论文中的图3)。
3.1.3 几何识别与查询构建
稀疏空间检索的第一步是从用户问题中识别几何对象及其空间关系。几何对象可以分为以下三类:
- 点(Point):如地标、地址点、用户当前位置。
- 线(Polyline):如街道、河流、公交线路。
- 多边形(Polygon):如区域、城市、校园。
通过识别几何对象及其关系,系统可以构建精确的空间 SQL 查询。例如:
- 对于“寻找离当前位置最近的公交站点”,系统会生成一个基于点的查询。
- 对于“沿着某条街道寻找餐厅”,系统会生成一个基于线的查询,并设置缓冲区。
3.2 密集语义检索
3.2.1 语义候选集的定义
语义候选集 CkCk 包含满足用户语义意图的对象: Ck(q)={y∣ck(y,q)≤0,∀ck∈Ck(q)}Ck(q)={y∣ck(y,q)≤0,∀ck∈Ck(q)}
- ck(y,q)ck(y,q):语义约束函数,用于过滤不符合语义意图的对象。
- 每个空间对象都包含文本描述(如名称、评论),通过 LLM 提取其中的语义特征。
3.2.2 语义相关性计算
通过 LLM 提取用户问题和对象描述的语义向量: vq,k=E(Mk(q)),vt,k=E(Mk(dt))vq,k=E(Mk(q)),vt,k=E(Mk(dt))
- MkMk:过滤冗余信息的掩码函数。
- EE:文本编码器。
语义相关性通过余弦相似度计算: fk=vq,k⋅vt,k∥vq,k∥∥vt,k∥fk=∥vq,k∥∥vt,k∥vq,k⋅vt,k
通过这种方式,系统能够识别出与用户语义偏好最相关的对象。例如,在“寻找评分高于 4.5 的中餐馆”中,系统会优先选择符合评分和餐厅类型的候选对象。
3.3 多目标优化生成
3.3.1 Pareto 前沿
在空间相关性 fsfs 和语义相关性 fkfk 之间进行权衡,定义 Pareto 最优解集: P(q)={y∈Cs∩Ck∣∄y′∈Cs∩Ck,使得 fs(q,y′)≥fs(q,y) 且 fk(q,y′)≥fk(q,y)}P(q)={y∈Cs∩Ck∣∄y′∈Cs∩Ck,使得 fs(q,y′)≥fs(q,y) 且 fk(q,y′)≥fk(q,y)}
3.3.2 动态权重调整
通过 LLM 动态调整空间与语义的权重: y∗=argmaxy∈P(q)λsfs(q,y)+λkfk(q,y)y∗=argmaxy∈P(q)λsfs(q,y)+λkfk(q,y)
- λs,λkλs,λk:根据问题上下文动态调整的权重。
通过这种方式,系统能够根据用户的具体需求生成既符合空间约束又满足语义偏好的答案。
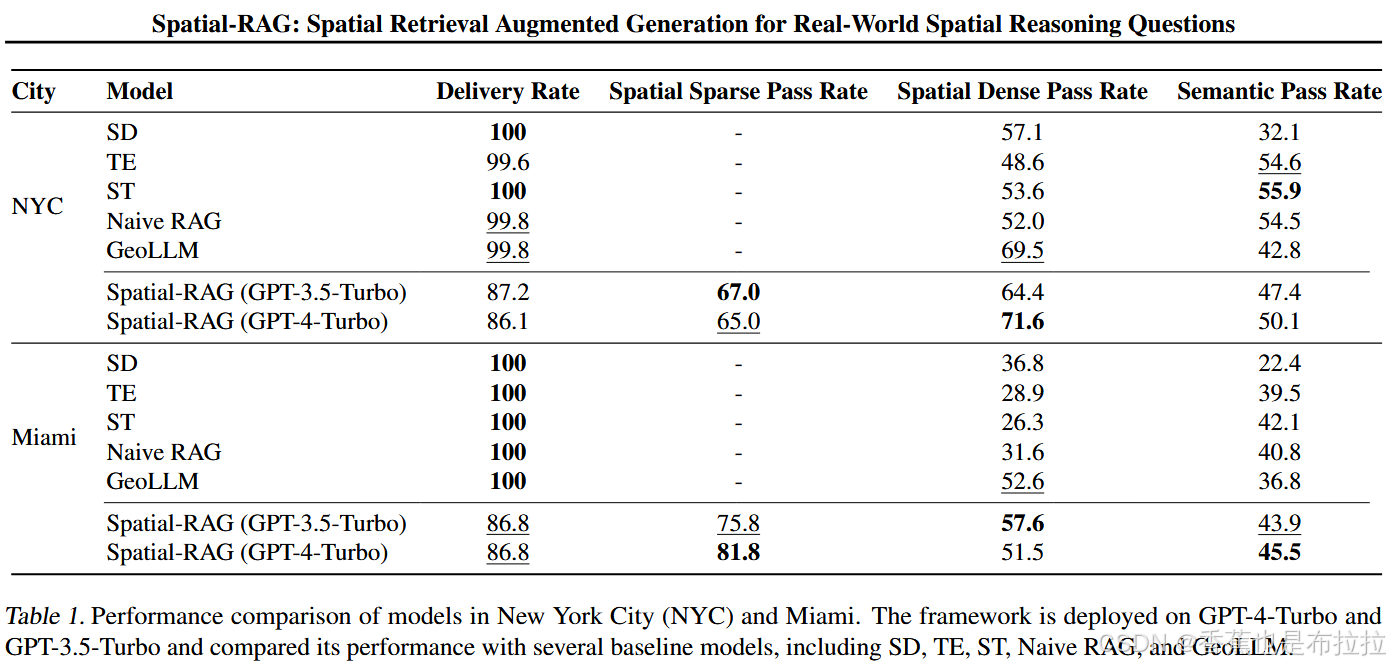
4. 实验与结果
以下是实验结果表:
5. 案例分析
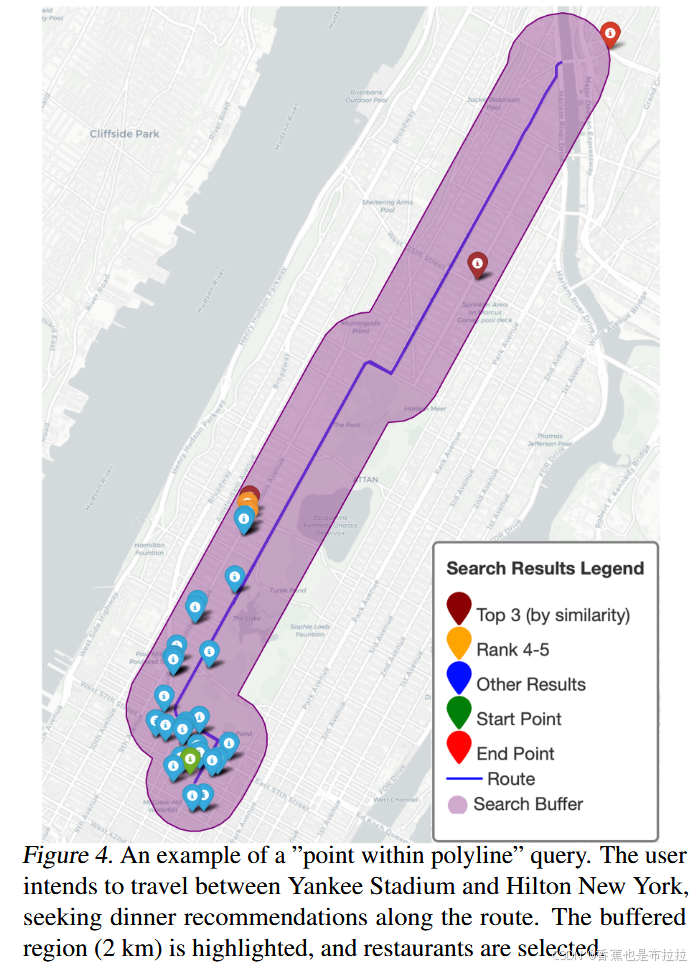
以下是一个典型案例:
- 问题:用户从 Yankee Stadium 到 Hilton New York 的路线上寻找餐厅推荐。
- Spatial-RAG 的操作:
- 识别用户的空间意图(沿路线寻找)。
- 构造 2 公里缓冲区,检索沿途的餐厅。
- 结合用户的语义偏好(“简单的晚餐”),生成最优推荐。
以下是案例示意图:
6. 结论与展望
6.1 主要贡献
- 提出 Spatial-RAG 框架,显著提升了 LLMs 的空间推理能力。
- 实现了结构化空间检索与自然语言生成的无缝集成。
- 在真实世界数据集上验证了其有效性,优于现有基线模型。
6.2 未来方向
- 多模态扩展:结合图像、视频等多模态数据,进一步增强空间推理能力。
- 应用场景拓展:探索在自动驾驶、智能导航、增强现实等领域的应用。



















 439
439

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











