







1.算法原理
已知有两幅点云,分别为源点云P和目标云Q。
1)将源点云P所在空间划分为一个一个的单元网格,(即三维空间在二维空间上的投影)。
2)根据所划分单元网格内点的分布情况,计算单元网格的正态分布PDF参数。
3)根据转移矩阵,将目标点云Q内的点进行变换。
4)统计源点云P所在空间划分网格内目标点云的个数,根据点的分布情况,对应的概率分布函数。
5)求解所有点的最优解,也即求目标云与源点云之间的刚体变换。分数通过output cloud和target cloud 对应的最近点欧式距离的平方得到,得分越小说明匹配效果越好。
2.程序代码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/ndt.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
int
main (int argc, char** argv)
{
//加载房间的第一次扫描
pcl::PointCloud<pcl::PointXYZ>::Ptr target_cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("room_scan1.pcd", *target_cloud) == -1)
{
PCL_ERROR ("Couldn't read file room_scan1.pcd \n");
return (-1);
}
std::cout << "Loaded " << target_cloud->size () << " data points from room_scan1.pcd" << std::endl;
//加载从新视角得到的房间的第二次扫描
pcl::PointCloud<pcl::PointXYZ>::Ptr input_cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("room_scan2.pcd", *input_cloud) == -1)
{
PCL_ERROR ("Couldn't read file room_scan2.pcd \n");
return (-1);
}
std::cout << "Loaded " << input_cloud->size () << " data points from room_scan2.pcd" << std::endl;
//将输入的扫描过滤到原始尺寸的大概 10% 以提高匹配的速度。
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::ApproximateVoxelGrid<pcl::PointXYZ> approximate_voxel_filter;
approximate_voxel_filter.setLeafSize (0.2, 0.2, 0.2);
approximate_voxel_filter.setInputCloud (input_cloud);
approximate_voxel_filter.filter (*filtered_cloud);
std::cout << "Filtered cloud contains " << filtered_cloud->size ()
<< " data points from room_scan2.pcd" << std::endl;
//初始化正态分布变换(NDT)
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> ndt;
//设置依赖尺度NDT参数
//为终止条件设置最小转换差异
ndt.setTransformationEpsilon (0.01);
//为More-Thuente线搜索设置最大步长
ndt.setStepSize (0.1);
//设置NDT网格结构的分辨率(VoxelGridCovariance)
ndt.setResolution (1.0);
//设置匹配迭代的最大次数
ndt.setMaximumIterations (50);
// 设置要配准的点云
ndt.setInputCloud (filtered_cloud);
//设置点云配准目标
ndt.setInputTarget (target_cloud);
//设置使用机器人测距法得到的初始对准估计结果
Eigen::AngleAxisf init_rotation (0.6931, Eigen::Vector3f::UnitZ ());
Eigen::Translation3f init_translation (1.79387, 0, 0);
Eigen::Matrix4f init_guess = (init_translation * init_rotation).matrix ();
//计算需要的刚体变换以便将输入的点云匹配到目标点云
pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud (new pcl::PointCloud<pcl::PointXYZ>);
ndt.align (*output_cloud, init_guess);
std::cout << "Normal Distributions Transform has converged:" << ndt.hasConverged ()
<< " score: " << ndt.getFitnessScore () << std::endl;
//使用创建的变换对未过滤的输入点云进行变换
pcl::transformPointCloud (*input_cloud, *output_cloud, ndt.getFinalTransformation ());
//保存转换的输入点云
pcl::io::savePCDFileASCII ("room_scan2_transformed.pcd", *output_cloud);
// 初始化点云可视化界面
boost::shared_ptr<pcl::visualization::PCLVisualizer>
viewer_final (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer_final->setBackgroundColor (0, 0, 0);
//对目标点云着色(红色)并可视化
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
target_color (target_cloud, 255, 0, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (target_cloud, target_color, "target cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "target cloud");
//对转换后的目标点云着色(绿色)并可视化
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
output_color (output_cloud, 0, 255, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (output_cloud, output_color, "output cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "output cloud");
// 启动可视化
viewer_final->addCoordinateSystem (1.0);
viewer_final->initCameraParameters ();
//等待直到可视化窗口关闭。
while (!viewer_final->wasStopped ())
{
viewer_final->spinOnce (100);
boost::this_thread::sleep (boost::posix_time::microseconds (100000));
}
return (0);
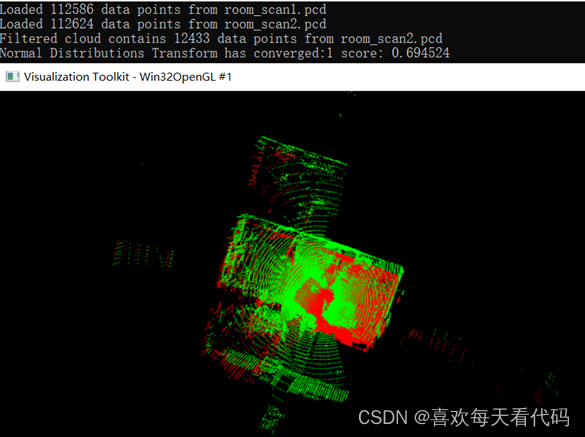
}3.官网代码运行效果
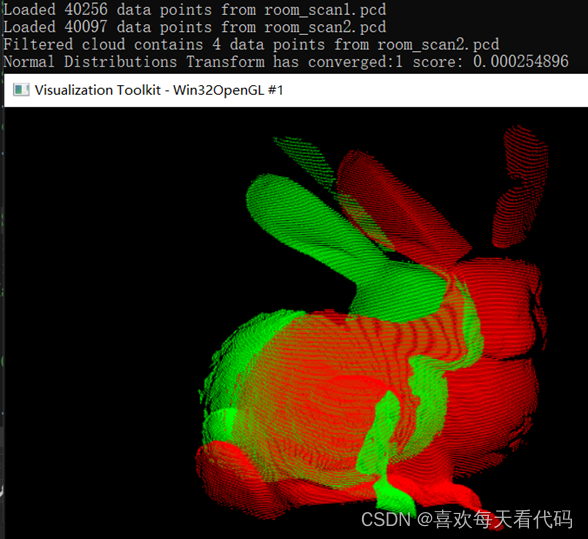
4.切换其他数据
改变相关参数,得到的分数很小很小,可能是由于数据量小,点接触比较密集,因此得到的分数很小。但距离总是存在那一点点距离,导致匹配效果不理想。可能是我参数没有设置对,如果这一块有人做过了,麻烦各位大佬给我讲解一下。
NDT算法输出之后,我在这一块又加上了ICP算法进去,现在的配准效果还是可以的。
如果有大佬做过NDT算法配准bun.pcd这幅数据成功的,麻烦教我一下,本人将感激不尽。















 273
273











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









