






仿生蝴蝶设计报告
实验背景
以昆虫为灵感设计的仿生扑翼飞行器在近三十余年来的时间里发展迅速,而蝴蝶作为众多昆虫中极富特色的一种也得到了许多研究者的关注。国内外以蝴蝶为研究对象进行了许多的仿生学研究和仿生飞行器研制,尤其是近十年来仿蝴蝶扑翼飞行器的设计与制造取得了较大的进展。
无论是从飞行外观还是从飞行机制上来讲,蝴蝶都与自然界的大多数昆虫存在很大差异。首先从翅膀来看,相比蜻蜓、蚊子等常见的昆虫,蝴蝶的翅膀具有极大的展弦比,基本接近于1∶1,这一特性导致蝴蝶在挥动翅膀进行扑翼飞行的过程中需要克服极大的空气阻力,这要求蝴蝶自身提供很大的输出力矩,所以可以很直观观察到蝴蝶的扑翼频率很慢,最高在10 Hz左右,相比果蝇可以达到250 Hz的扑翼频率要低很多。大多数具有狭长翅形的昆虫在翅膀上下拍动时,会形成一个接近水平的划水平面,因而翅膀无论是向上运动还是向下运动,都可以产生一个向上的升力,同时还可以通过调节扑翼方式,抵消向周围位移的力,实现精准的悬停飞行,而蝴蝶则不同,无法悬停,其上下扑翼的过程其实更类似于鸟类扑翼(蜂鸟除外,蜂鸟的扑翼方式与狭长翼昆虫类似)。
但相比鸟类飞行,蝴蝶在结构和飞行机制上也存在着许多的不同。首先,鸟类有比较宽大的尾巴,虽然同样不能悬停,但通过尾巴控制面,鸟类可以进行姿态和飞行控制。其次,鸟类的翅膀附着有大量的羽毛,可以通过羽毛的收缩和舒展控制上下扑翼过程与空气的接触面积大小来形成升力阻力差。此外,鸟类的翅膀可以很灵活地伸展收回,这一特点应用于扑翼飞行可以进一步提升飞行时的升力,同时在上拍过程中通过收翼减小阻力。
所以,不同于传统昆虫和鸟类,蝴蝶有着自己独特的扑翼飞行方式,同时由于其低频扑翼特性,所以具有低噪声、低功耗的优点,近年来吸引了许多研究者对其扑翼机制进行了深入研究,并且越来越多研究者开展了仿蝴蝶扑翼飞行器(Butterfly Inspired Flapping Wing Air Vehicle,BIFAV)的设计与实现研究。
飞行机理
近二十年来,随着人们对昆虫、鸟类等生物飞行机理研究的不断深入,想要成功设计并制造出一款可以飞行的仿生扑翼飞行器,至少需要满足两个条件,其一是产生足够的升力和推力来克服重力飞行,其二是能够保证稳定可控飞行。关于仿蝴蝶扑翼飞行器飞行机理的研究,也要是基于上述两点开展的。
升力和推力机制
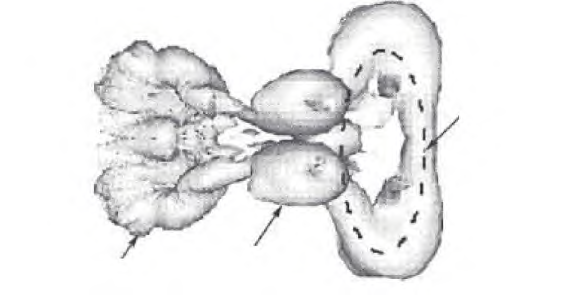
蝴蝶主要是通过“阻力原理”进行拍动飞行,平衡身体重量的升力和克服身体阻力的推力均由翅膀的阻力提供,蝴蝶在下拍过程中会产生很大的瞬态阻力,每次下拍中会产生一个由前缘涡、翅端涡及启动涡构成的强“涡环”,其包含一个沿拍动方向的射流,产生此射流的反作用力即翅膀的阻力,如图1所示。
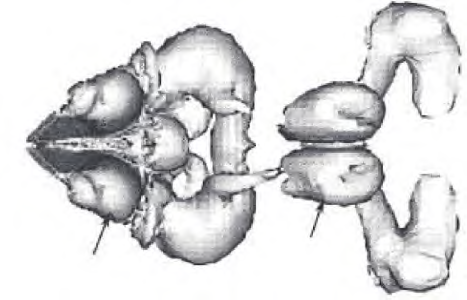
平衡身体重量的升力主要由翅膀下拍中产生的阻力提供。上拍时,由于身体上仰,上拍实际是向后和向上拍动,提供了蝴蝶前进过程中克服阻力的推力,如图2所示。
北京航空航天大学的孙茂等就黑框蓝闪蝶前飞时的气动特性,通过在运动重叠网格上数值求解Naivie-Stokes 方程进行了验证,同时获得了蝴蝶前飞过程中的升力、推力公式以及对应的升力系数。
V
=
d
c
o
s
β
+
l
s
i
n
β
T
=
−
d
s
i
n
β
+
l
c
o
s
β
C
ν
=
V
0.5
ρ
U
2
S
V=dcos\beta+lsin\beta \\ T=-dsin\beta+lcos\beta \\ C_\nu=\frac{V}{0.5\rho U^2S}
V=dcosβ+lsinβT=−dsinβ+lcosβCν=0.5ρU2SV
式中,V, T,
C
ν
C_\nu
Cν分别代表升力、推力以及升力系数,ρ 为流体密度, U为蝴蝶对应流体的参考速度,S为翅膀面积。
蝴蝶在上拍的过程中产生运动所需要的推力的同时,也不可避免地引入了一部分向下的力,这部分力会阻碍蝴蝶上升,值得注意的是这部分力虽然会抵消一部分下拍过程中产生的升力,但相较而言,这部分阻力要小得多。自然界的昆虫在扑翼过程中可以很灵活地去改变翅翼的迎风面积,尤其是像蝴蝶这样翼面积很大的个例,其翼面积可改变的空间很大,通过改变前后翅相互叠合的程度,可以很好地提升下拍过程中产生的升力和减小上拍过程中的负升力。此外,蝴蝶翅膀柔性很大,在扑动过程中可以产生很大的柔性变形,可以向后推动更多的空气,从而进一步产生更大的推进力。
稳定机制
事实上,为了保证飞行的稳定性,蝴蝶除了需要扑动翅膀来获得足够的升力,还需要一定的机制去平衡运动,同时灵活地去调整飞行姿态,与鸟类利用尾翼平衡调整姿态以及果蝇等昆虫高速前后拍打翅膀实现复杂的翻滚操作不同,蝴蝶主要通过在拍打翅膀的同时灵活移动身体来完成各种飞行动作。

北京航空航天大学的Zhang Y等通过高速相机记录了蝴蝶在自由飞行过程中腹部的摆动、翅膀的运动以及身体的俯仰角,证明蝴蝶的翅膀和身体在不同的飞行状态下是存在耦合的,如图4所示。基于这一研究发现,建立了真实蝴蝶尺寸的三维刚体模型,并对其气动特性进行了仿真分析,得到了蝴蝶前飞的最优运动学模型,此外还介绍了前飞过程中三维涡结构的形成和变化,表明腹部摆动对蝴蝶扑翼过程中的重新定向和方向纠正起着关键作用。
针对这一特点,阿拉巴马大学亨兹维尔分校的Sridhar等也进行了相应的研究,将所建立的模型与捕捉到的帝王蝶的运动进行了比较,证明了蝴蝶腹部的抖动在增加帝王蝶爬升率和前进速度的同时,还使其运动产生了一个稳定的周期轨道。并且其通过仿真实验得出俯仰运动的平衡位为34°时,在测试速度范围内,飞行速度对气动力的影响是相对线性的。扑翼产生的平均升力和阻力随飞行速度同步增大,瞬时气动力峰值随之增大。随着升力不断增大,阻力则先减小后增大。在选择适当的运动学参数情况下,可以确保升力和推力足以实现飞行。此外扑翼角的幅值尽量不大,研究表明,蝴蝶在60°扑翼角时具有较大的平均升力,并产生一定的推力。蝴蝶根据不同的升力要求,通过胸腹调整身体俯仰运动从而实时调整相关参数,以达到最佳的运动性能。
结构设计
总体方案设计
仿生蝴蝶飞行器的设计是基于生物蝴蝶的特性,飞行器可以作为具有机翼的主动运动以产生浮力的扑翼装置,或者用作没有机翼的主动运动的滑翔机来产生浮力,其特点在于:
- 仿蝴蝶飞行器以舵机直接控制翅膀幅度和频率来代替传动机构,使得控制系统更加灵活多变。
- 翅膀的前后双翼分流设计更好的贴合了自然界蝴蝶的翅膀模型,使得升力利用率更高。
- 蝴蝶飞行器的配重分布,使得飞行器的飞行状态相对平稳。
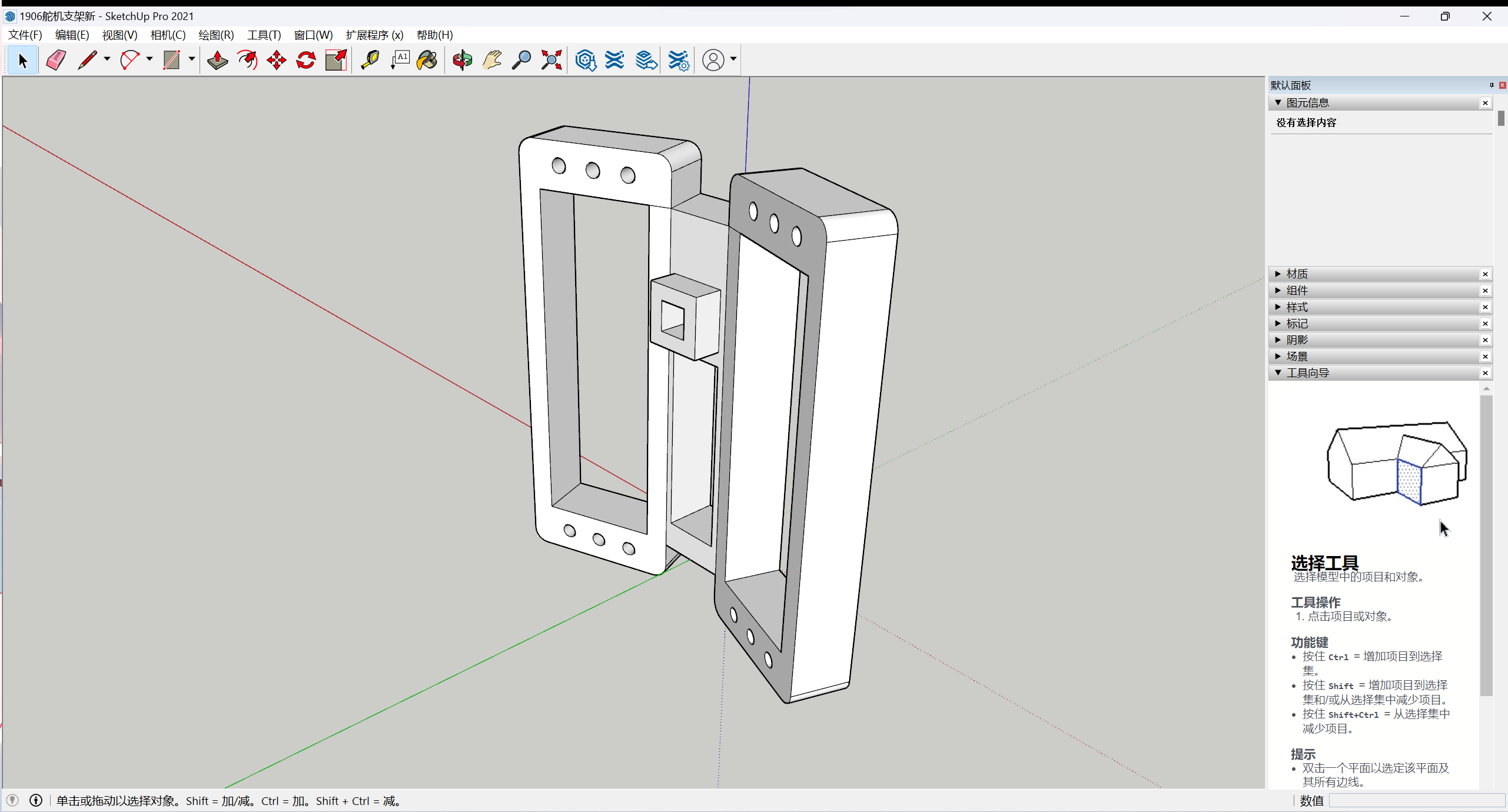
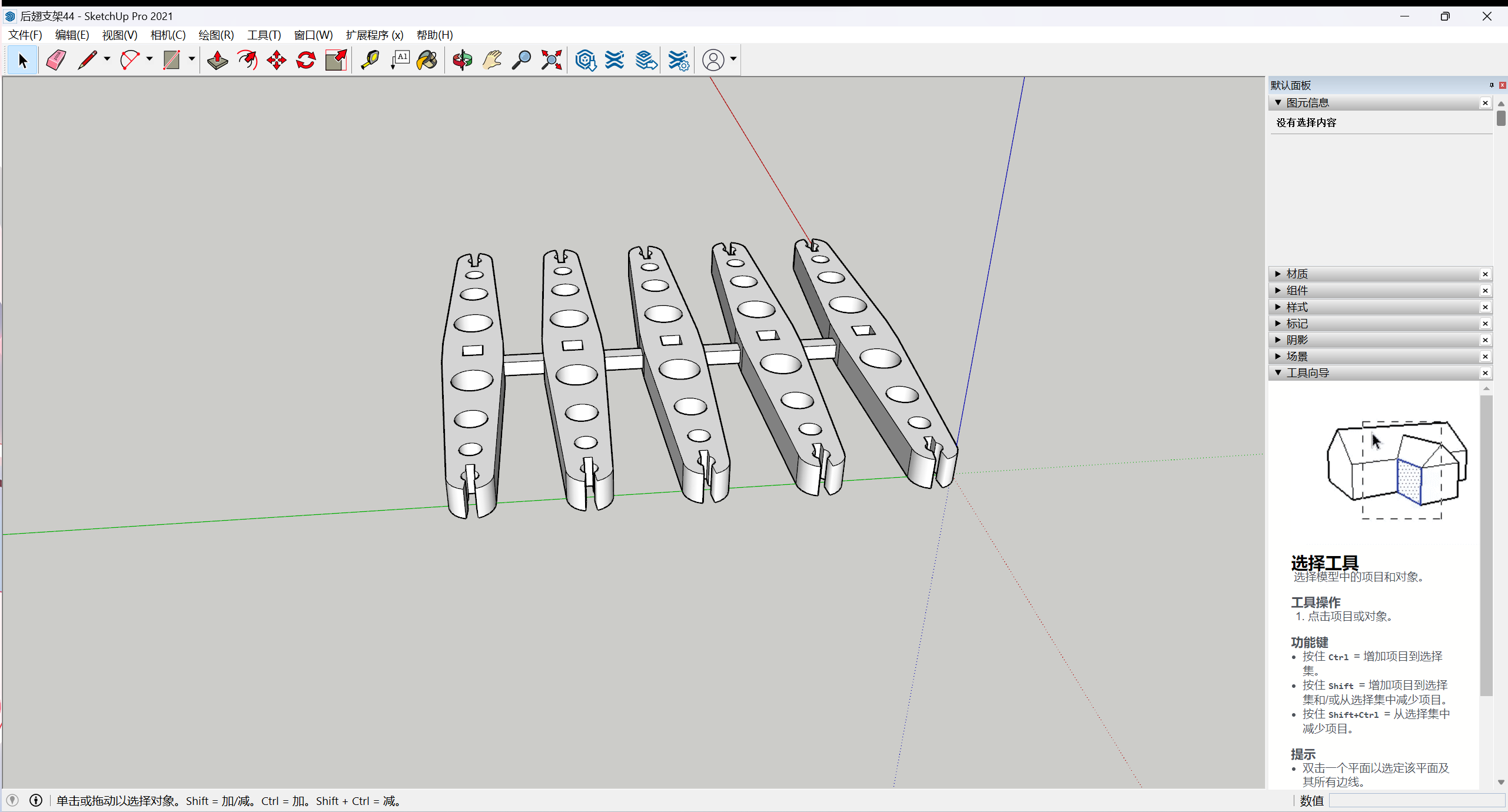
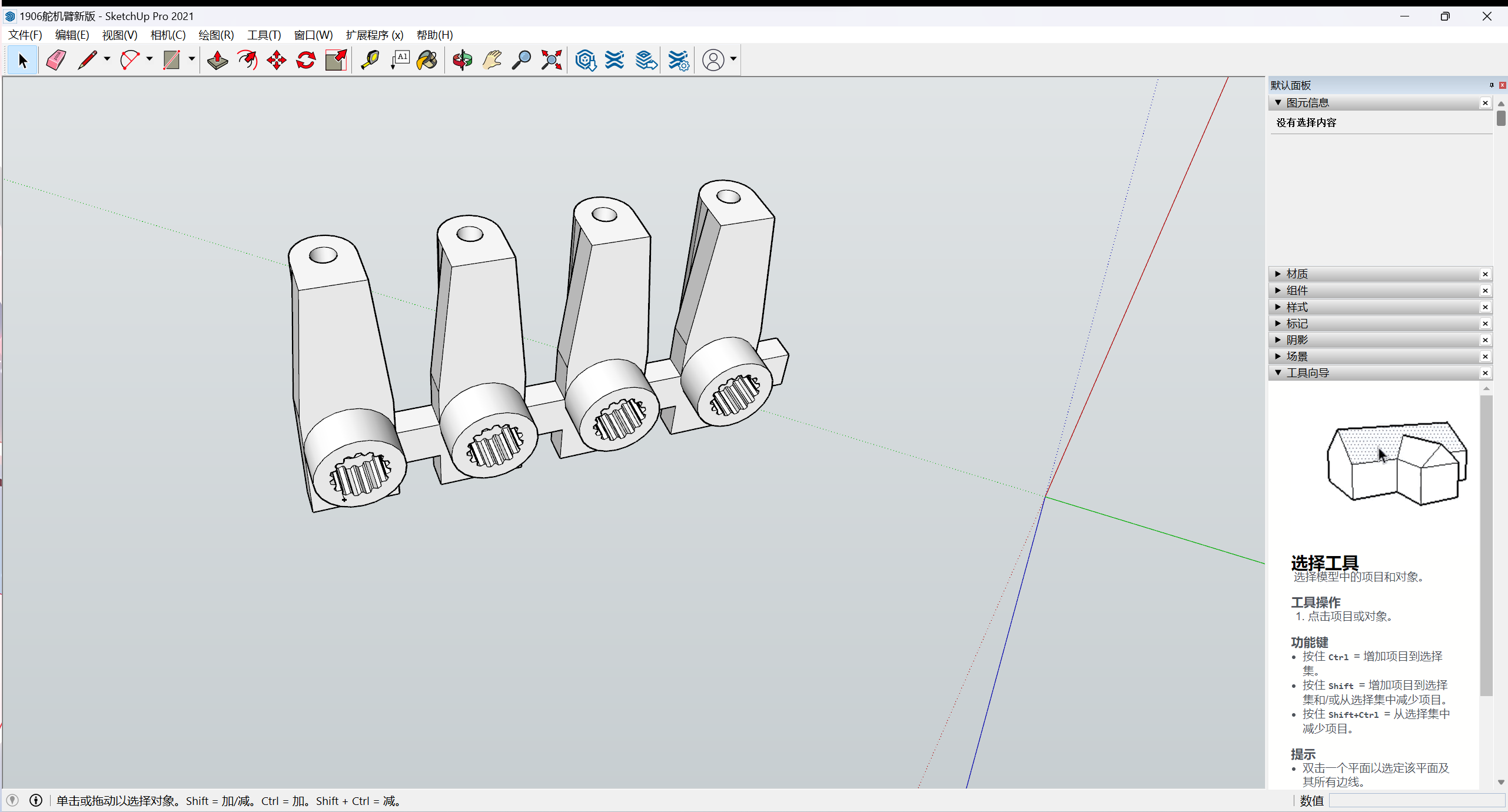
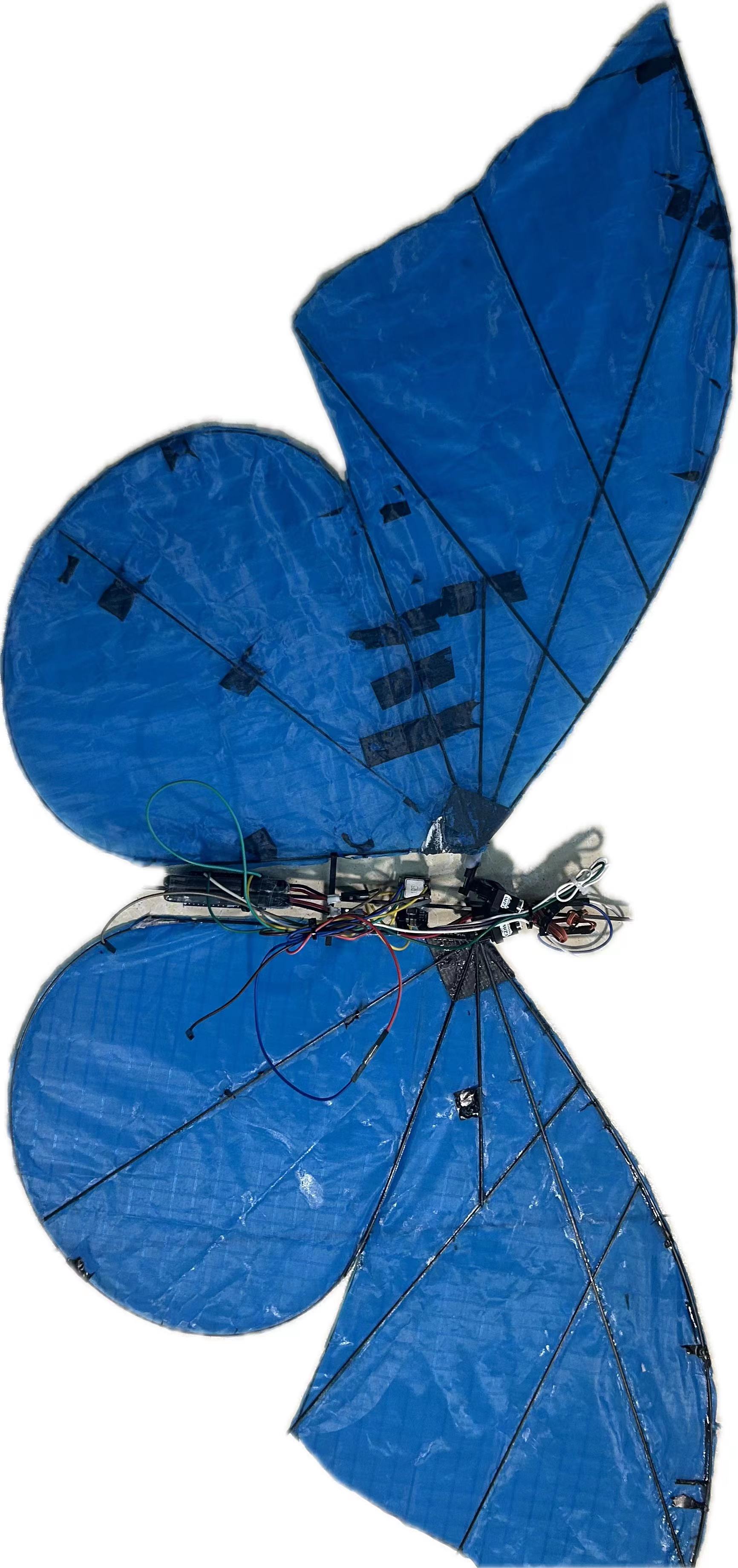
如图5,本次实验设计的仿生蝴蝶扑翼飞行器主要分为机身,以及两侧机翼。机翼对称设计在机身两侧并且每侧机翼都具有沿着机身延伸的机翼内边缘。每侧机翼配置有传动装置,该传动装置包括舵机、舵机与机翼驱动轴之间的连接机构,和固定在机身上的副翼支架和舵机座。电池、稳压模块、主控板固定在机身后侧。
每个机翼被分成主翼和副翼。根据图5 所示,主翼具有三角形扇形表面形状,而副翼具有水滴形表面形状,类似蝴蝶的翅膀外形。
飞行类昆虫其翅膀大多由复杂的翅脉结构和柔性翅膜组成,分析昆虫翅膀的形貌结构,主要有几个特点和优势:
- 轮廓呈光滑圆弧的封闭形态,最大化利用气动力。
- 大部分翅膀轮廓内分布的是厚度几百纳米到几微米的透明薄膜,极大减轻翅膀重量,从而弱化扑翼飞行时翅膀自身惯性作用的影响。
- 在翅膀前缘部分分布着主翅脉,轮廓内也分布着相对较细的分叉翅脉,保证翅膀的结构刚度,防止气动力作用下的变形。
针对上述特点,本文将蝴蝶翅膀的翅脉简化,两侧机翼由驱动轴、外包络翅脉、内包络翅脉以及辅助翅脉组成。由于翅膀的主要质量来源于翅脉(包括外包络翅脉),因此翅膀的转动惯量主要取决于翅脉的质量分布。所以,翅膀的质量分布应该尽量靠近翅膀的拍打轴和扭转轴,离拍打轴和扭转轴越远,翅脉设计得应该越细,离拍打轴和扭转轴越近,翅脉设计得应该越粗。这种设计既可以保证翅膀得牢固性,又可以尽量减小翅膀得转动惯量,降低负载。
传动机构设计
在仿昆虫扑翼飞行器胸腔结构的设计上,研究人员尝试了不同的传动机构。众所周知,昆虫翅膀的拍打运动是大幅度往复式的,而针对不同驱动方式的仿昆虫扑翼飞行器,其传动机构的设计也是不同的。在大尺度下(一般指电机驱动仿昆虫扑翼飞行器),传统机械结构的传递效率较高,加工可行性很高,目前比较成功的传动机构大致总结有以下三种:
- 刚性连杆机构,将电机的旋转运动转化为翅膀的往复式拍打运动,例如加州理工学院研制的MicroBat,以及DelFly 系列样机。
- 绳传动机构,绳传动使得系统的结构更加简单和紧凑,这也是纳米蜂鸟机器人取得成功的关键因素之一。
- 齿轮减速箱,直接通过控制信号实现“电机+ 齿轮减速箱” 的往复运动,例如卡内基梅隆大学研制的电机直驱仿昆虫扑翼飞行器(电机内置齿轮减速箱)和普渡大学研制的电机驱动仿昆虫扑翼飞行器(电机带动外置齿轮减速箱)。
随着尺度的缩小,表面力的影响相对于体积力会变得更加显著,传统机械结构中的“轴”和“齿轮”等传动方式效率低,加工难度大。研究人员在小尺度下(一般使用压电驱动和电磁驱动)对传动机构进行了大量的探索和尝试。目前比较成功的主要有以下两种:
- 基于柔性铰链的连杆机构(包括平面连杆机构和空间连杆机构),体积小、质量轻、易加工、传动效率高,在小尺度下展现了很大的优势。哈佛大学在昆虫尺度仿生扑翼飞行器的研究中使用了这类机构,并取得了巨大的成功。
- 直驱方式,比如普渡大学研制的电磁驱动仿昆虫扑翼飞行器,采用了一种新颖的电磁驱动器,不需要额外的传动机构,可以直接驱动翅膀实现往复拍打运动,最终也成功实现了克服重力起飞。
本实验设计的仿生蝴蝶飞行器舍弃了一般电机与机翼之间的传动机构,而是选择了舵机直驱,这样可以大大减少飞行器本身的质量,同时舵机的灵活性和可操作性很好的满足了扑翼飞行器的反复拍打动作需求。在舵机的帮助下,可以在宽范围内调节拍打幅度和频率,以确保对飞行器姿态的综合影响。因此,通过适当控制相应的枢转装置,通过一个或两个翼的拍打幅度和频率的变化来影响飞行器的轨迹。
舵机直驱的优势在于枢转装置包括具有可逆旋转方向的,其直接或借助于齿轮系与输出构件直接连接,翼的枢转运动不需要通过始终沿相同方向的曲柄运动和机翼上的相关联的杆传递,这在作为仿蝴蝶扑翼装置的飞行器的设计中尤为关键。
制作方案
材料选择
本文中设计的仿蝴蝶扑翼飞行器主要由驱动器(舵机直驱)、机身支架、翅膀(包括翅膀和翅膀根部)和机身四大部分组成。零部件尺寸在毫米尺度,飞行器在飞行过程中受空气阻力较大,加上该飞行器自身机载电池和电路板,所以对制作加工的材料有很苛刻的要求。
整个飞行器材料根据加工方法、使用工况以及成本造价权衡后,选择了以下三种主要材料(PA12尼龙、碳纤维杆、P31N风筝布)进行生产制造。
主体材料选择和加工
多数零件拥有较为复杂的形体与一定标准的使用强度,进行比较后选择了PA12尼龙塑料。其优点在于:
- 可作为3D 打印的原材料来满足3D 打印需求
- 加热后具有较高的塑性便于打印
- 3D 打印颗粒较为致密,保证一定形态
- 常温下屈服强度较普通塑料较高,可满足长时间的使用
- 化学性质较为稳定长时间保存不易变形
- 造价较为低廉,市面上常见耗材。
因此选择以下零部件材质为PA12尼龙塑料:舵机座、副翼支架、舵机与主翼连接件。

翅翼材料的选择和加工
翅膀的材料和加工分为翅脉和翅膜,仿生蝴蝶飞行器决定选择新型材料碳纤维作为翅膀支架的材料。由于其良好的柔性以及较高的强度都能很好满足翅膀的工作需求以及材料性能要求(表1)。并且其重量甚至轻于普通塑料,所以非常适合作为翅膀材料。在之前的设计提到,为了降低仿蝴蝶飞行器的负载,需要尽量减轻翅膀整体的重量和转动惯量。这就要求我们在保证翅膀强度和加工可行性的同时,需要尽量将翅脉细化,在非驱动轴和承重轴的用料上可以尽量减轻负载。由于翅膀面积较小以及碳纤维价格的下降,其成本也只是略高于玻璃纤维,非常适合作为柔性翅膀的使用。
| 特性 | 数值 |
|---|---|
| 质量密度( g / c m 3 g/cm^3 g/cm3) | 1.76 |
| 拉伸强度( M P a MPa MPa) | 7000 |
| 极限拉伸强度( M P a MPa MPa) | 3800 |
| 泊松比 | 0.307 |
蝴蝶翅膀的薄膜材料选用的是P31N风筝布。作为柔性薄膜,P31N风筝布具有良好的变形率、回弹性、耐摩擦性能,以及抗撕裂能力。成品图如下:
传动机构选择
该仿生蝴蝶飞行器舍弃了一般电机与机翼之间的传动机构,而是选择了舵机直驱,这样可以大大减少飞行器本身的质量,同时舵机的灵活性和可操作性很好的满足了扑翼飞行器的反复拍打动作需求。在舵机的帮助下,可以在宽范围内调节拍打幅度和频率,以确保对飞行器姿态的综合影响。因此,通过适当控制相应的枢转装置,通过一个或两个翼的拍打幅度和频率的变化来影响飞行器的轨迹。舵机直驱的优势在于枢转装置包括具有可逆旋转方向的,其直接或借助于齿轮系与输出构件直接连接,翼的枢转运动不需要通过始终沿相同方向的曲柄运动和机翼上的相关联的杆传递,这在作为扑翼装置的飞行器的设计中尤为关键。
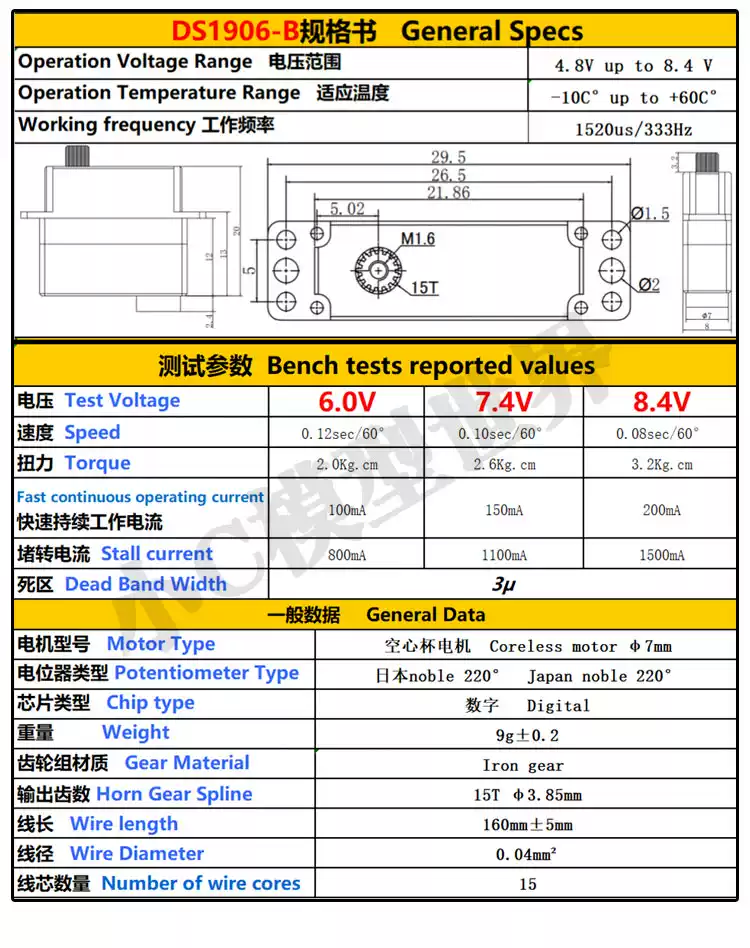
舵机的性能将关系到仿蝴蝶飞行器的运动性能,由于蝴蝶的翅膀面积较其他昆虫大,其拍打频率较低,所以想要提供足够的升力,对舵机的要求自然很严格。在选型上,既要质量轻,有需要有足够的扭矩和反应速度。
最终在舵机的选型上选用DS1906b数码舵机,下图列出了该舵机的样式、尺寸,及其参数规格。
电源选择
为了控制仿生蝴蝶的整体重量,同时要确保足够大的舵机驱动电流,电源的选择非常重要。在综合比较市面上常见的各类电池后,我们最终选择了“格氏 300 m A ⋅ h 300mA\cdot h 300mA⋅h”航模电池。航模电池的设计考虑了模型飞行器对电源的特殊需求,以提供轻量、高能密度、快速充放电等优点,使得模型飞行器能够在性能和效率上达到较好的平衡。以下是该航模电池的具体参数:

因为DS1906b舵机的驱动电压在4.8V到8.4V之间,为了使得电源输出电压与其适配,同时也保证输出电压的稳定,我们还需要稳压升压模块,处于重量、输出电流等特性的考虑,我们选择了DCE011升压型电源模块,重量仅有4g。具体参数如下:
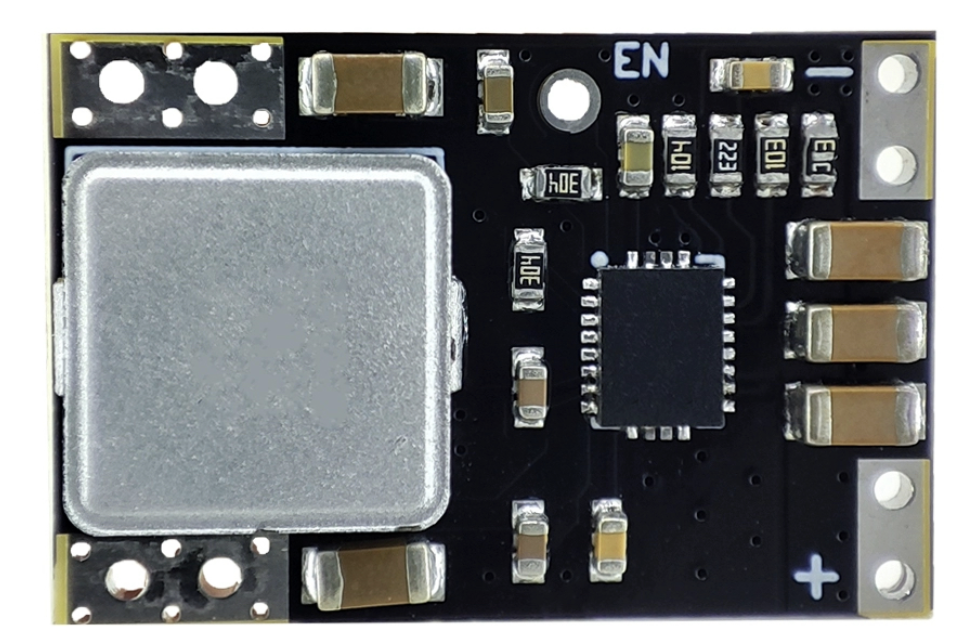
| 参数名称 | 参数值 |
|---|---|
| 输入电压 | 3-11V |
| 输出电压 | 8V |
| 输出精度 | $\pm$0.1V |
| 重量 | 4g |
| 出厂老化标准 | 48h无故障 |
| 尺寸 | 25$\times 17 17 17\times$5.5mm |
主控板选择
因为仿生蝴蝶的控制流程比较简单,对主控板的性能没有太高要求,因此我们出于重量优先的考虑,选择了重量只有7g的Arduino Nano单片机。成品图以及参数表如下:
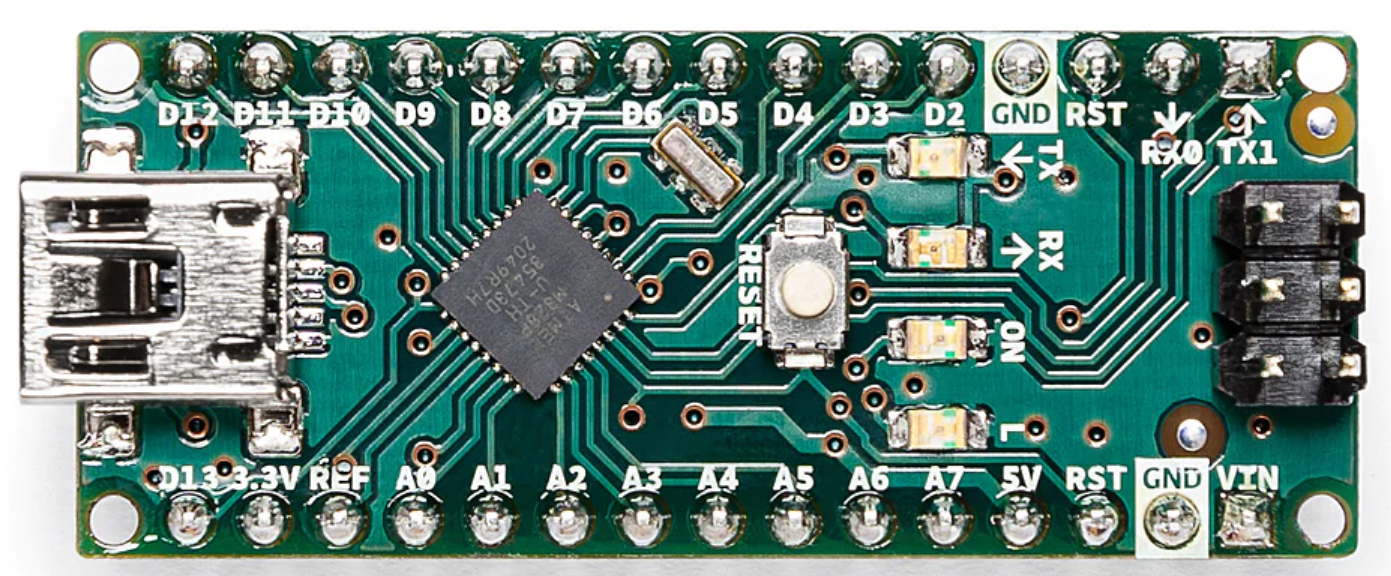
| 特性 | 参数 |
|---|---|
| Microcontroller | ATmega328 |
| Architecture | AVR |
| Operating Voltage | 5 V |
| Flash Memory | 32 KB of which 2 KB used by bootloader |
| SRAM | 2 KB |
| Clock Speed | 16 MHz |
| Analog IN Pins | 8 |
| EEPROM | 1 KB |
| DC Current per I/O Pins | 20 mA (I/O Pins) |
| Input Voltage | 7-12V |
| Digital I/O Pins | 22 (6 of which are PWM) |
| PWM Output | 6 |
| Power Consumption | 19 mA |
| PCB Size | 18 x 45 mm |
| Weight | 7 g |
| Product Code | A000005 |
陀螺仪选择
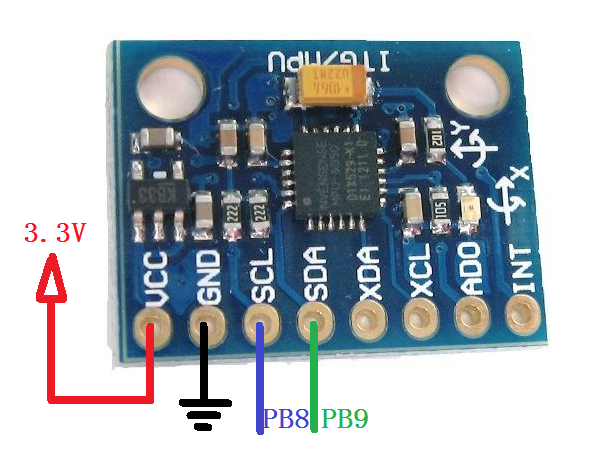
在本次实验中,我们尝试在起飞阶段使用陀螺仪进行仿真蝴蝶的负反馈控制,我们选择了市面上常见的ms6050陀螺仪
| 特性 | 参数 |
|---|---|
| 制造商 | TDK |
| 接口类型 | I2C |
| 输出类型 | Digital |
| 灵敏度 | 16384 LSB/g |
| 电源电压 | 2.375-3.46V |
| 工作温度 | -40C +105C |
代码设计
算法流程
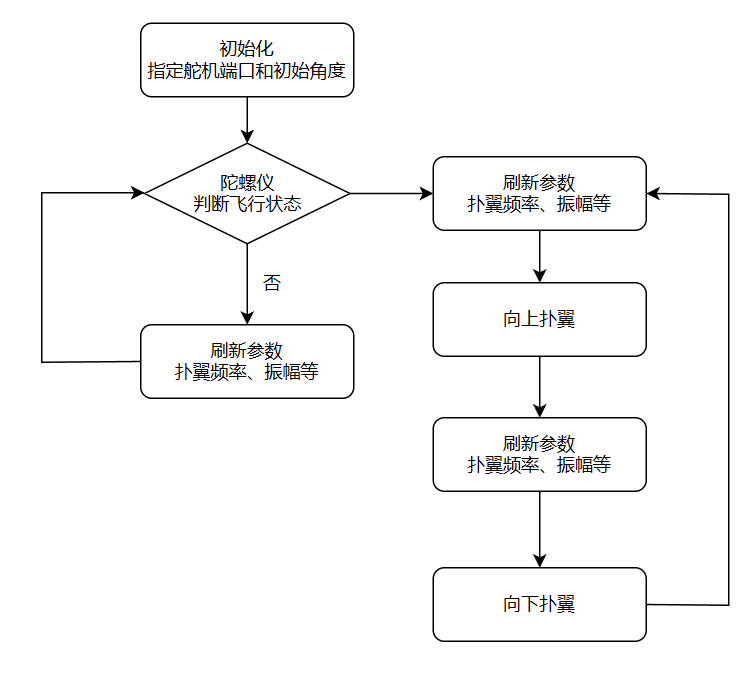
Ardiuno的编程比较简单,主要流程为调用setup()函数进行初始化,指定舵机端口和初始角度,然后利用陀螺仪返回蝴蝶的飞行状态,直到成功起飞后,进入loop()循环,不断重复“refresh()刷新扑翼频率、振幅等参数 -> 向上扑翼flap_up() -> refresh()刷新扑翼频率、振幅等参数 -> 向下扑翼flap_down()”。这里把仿生蝴蝶的一个完整的扑翼周期划分为向上和向下两次扑翼环节,并可以分别针对两个环节进行参数调整。
代码与调参
#include <Servo.h>
//定义舵机A0,A1
Servo servo_A0;
Servo servo_A1;
//定义舵机的脉宽(500-2500us)->角度
int pulsewidth_0;
int pulsewidth_1;
//舵机的中间脉宽,左右可能不一致,应该在1500左右,可能需要微调
int servo_mid0=1400;//干净翅膀 越小越上
int servo_mid1=1600;//不干净的翅膀 越大越上
//飞行标志
int fly=0;
//控制参数
double rad=0;
double f=1;//扑翼频率,蝴蝶的扑翼频率在1-10hz
int ang_bias=0;//初始翅膀角度偏置(左加右减),可取(-200,200)之间的值
int amp=1000;//扑翼振幅 amp<1000, 可取400 500 600
int amp_diff=0;//左右扑翼振幅差(左加右减),可取(-100,100)之间的值
double pi=3.1415926;
//舵机的初始脉宽,可取舵机的中值脉宽
int servo_ini0=servo_mid0-amp;
int servo_ini1=servo_mid1+amp;
//参数更新函数
void refresh(int freq=1,int Amp=500,int Amp_diff=0,int Ang_bias=0){
ang_bias=Ang_bias;
amp=Amp;
amp_diff=Amp_diff;
f=freq;
}
//舵机控制函数
void servo_control(){
//将指定的脉冲宽度传给舵机,控制角度
servo_A0.writeMicroseconds(pulsewidth_0);
servo_A1.writeMicroseconds(pulsewidth_1);
}
//扑翼函数
void flap_down(){
// 控制舵机按照正弦运动完成一次扑翼运动
for(rad=0 ;rad<pi;rad+=pi/10){
pulsewidth_0=(servo_mid0+ang_bias)-(amp+amp_diff)*cos(rad);
pulsewidth_1=(servo_mid1-ang_bias)+(amp-amp_diff)*cos(rad);
servo_control();
delay(50/f);
}
}
void flap_up(){
for(rad=pi ;rad>0;rad-=pi/10){
pulsewidth_0=(servo_mid0+ang_bias)-(amp+amp_diff)*cos(rad);
pulsewidth_1=(servo_mid1-ang_bias)+(amp-amp_diff)*cos(rad);
servo_control();
delay(50/f);
}
}
void setup() {
//指定舵机的端口
servo_A0.attach(A0);
servo_A1.attach(A1);
//舵机角度初始化
pulsewidth_0=servo_mid0;
pulsewidth_1=servo_mid1;
servo_control();
//延时1s
delay(1000);
}
void loop() {
refresh(3);
flap_up();
refresh(0.8);
flap_down();
}
虽然整体的代码量并不大,但是如何寻找到一套合适的参数让蝴蝶能够飞起来却是一个大工程。
下面是陀螺仪主体代码:
delay(100);
/* 获取ATK-MS6050 DMP处理后的数据 */
ret = atk_ms6050_dmp_get_data(&pit, &rol, &yaw);
// /* 获取ATK-MS6050加速度 */
// ret += atk_ms6050_get_accelerometer(&acc_x, &acc_y, &acc_z);
// /* 获取ATK-MS6050陀螺仪 */
// ret += atk_ms6050_get_gyroscope(&gyr_x, &gyr_y, &gyr_z);
// /* 获取ATK-MS6050温度*/
// ret += atk_ms6050_get_temperature(&temp);
if (ret == 0)
{
/* 上传相关数据信息至串口调试助手 */
printf("pit: %.2f, rol: %.2f, yaw: %.2f, \r\n", pit, rol, yaw);
// printf("acc_x: %d, acc_y: %d, acc_z: %d, ", acc_x, acc_y, acc_z);
// printf("gyr_x: %d, gyr_y: %d, gyr_z: %d, ", gyr_x, gyr_y, gyr_z);
// printf("temp: %d\r\n", temp);
}
总结与反思
在本次的实验中,我们设计的蝴蝶已经可以实现起飞、以及较长的滞空时间和上升趋势,但是在最后一次调参中,设置了5hz的正弦波频率,导致左翼的DS1906b舵机烧毁,无法进一步测试,我们相信如果进一步调整参数,我们最终非常有希望实现仿真蝴蝶扑翼机的长时间正常飞行。下面给出我们的总结与反思:
问题与反思
-
杜邦线:
实验室的杜邦线大多老化,具体测试时,有两根杜邦线起火烧掉了,有四根杜邦线内部铜丝呈部分粉末状,供电不稳定,而每次我们都需要耗费大量时间逐步排查,且杜邦线彼此的连接并不能很稳定。
-
连接件:
连接件精度和强度均有问题,组装测试过程中,由于我们设计时对精度要求0.1mm,但实际3D打印出来的连接件达不到该精度,需要我们手动挫碳纤维杆以适应连接件的孔径;并且调试过程中,由于连接件强度较低,连接件两次出现断裂。
-
舵机:
舵机质量有问题。最后一次测试过程中,给的信号是5Hz正弦波,且舵机的输入电压与输入电流均在舵机的参考输入范围之内,但是蝴蝶左翼翅膀的舵机还是出现了损坏,无法正常工作。我们分析后,认为可能是因为舵机给定频率过高,导致蝴蝶在飞行时阻力过大,舵机因为无法提供过大的扭矩而损毁。
-
稳压模块:
出于重量考虑,我们选择的是4g的稳压模块,不附带开关按键,这对我们的调试速率有所影响。
-
碳纤维杆:
碳纤维杆可以导电,与电路元件接触时需要注意导电的问题,后续对碳纤维杆和电路元件的连接处包裹透明胶布
-
陀螺仪:
MPU6050随着时间累积,误差会不断累加,无法形成稳定的负反馈。
不足与展望
-
改善连接,可以考虑设计一个整体的飞控板,将主板、稳压模块等电子元件整合到一起,防止出现接触不良等问题。我们实验过程中对部分杜邦线的连接使用热熔胶或者胶布进行加固。
-
替换掉质量较差的舵机
-
翅膀的形状、大小以及其中碳纤维杆的分布可以进一步优化,可以尝试将双翼形改成四翼形。
-
尝试提高3D打印零件的精度和强度
-
尝试读取陀螺仪的相对位姿,实现部分情况的负反馈控制
虑,我们选择的是4g的稳压模块,不附带开关按键,这对我们的调试速率有所影响。 -
碳纤维杆:
碳纤维杆可以导电,与电路元件接触时需要注意导电的问题,后续对碳纤维杆和电路元件的连接处包裹透明胶布
-
陀螺仪:
MPU6050随着时间累积,误差会不断累加,无法形成稳定的负反馈。
不足与展望
- 改善连接,可以考虑设计一个整体的飞控板,将主板、稳压模块等电子元件整合到一起,防止出现接触不良等问题。我们实验过程中对部分杜邦线的连接使用热熔胶或者胶布进行加固。
- 替换掉质量较差的舵机
- 翅膀的形状、大小以及其中碳纤维杆的分布可以进一步优化,可以尝试将双翼形改成四翼形。
- 尝试提高3D打印零件的精度和强度
- 尝试读取陀螺仪的相对位姿,实现部分情况的负反馈控制

















 3371
3371

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









